基于方向决策RRT算法的移动机器人路径规划
2022-07-20刘想德何翔鹏胡小林
刘想德,何翔鹏,胡 勇,胡小林
(1. 重庆邮电大学信息无障碍工程与机器人技术研发中心,重庆 400065;2. 重庆工业大数据创新中心有限公司,重庆 400000)
1 引言
移动机器人路径规划[1]是实现机器人自主导航的关键技术之一,其目的是使机器人在障碍物约束环境中,通过路径长度、搜索时间,平滑度以及避障能力等性能指标,求解出一条从起始点到目标点的最优或近似最优路径。
传统的移动机器人路径规划算法包括dijkstra算法[2]、遗传算法[3]、A*算法[4]、粒子群算法[5]等,然而面对复杂约束的机器人应用场景,这些算法往往需要大量的计算力。而Lavalle提出的快速扩展随机树(Rapidly-Exploring Random Tree, RRT)算法,在状态空间中进行随机碰撞检测,将搜索空间逐渐扩展至可通行区域,进而搜索出一条从起始点到目标点的可行路径[6-8],避免了对规划空间建模,运行速度快,被广泛应用于移动机器人路径规划中。
传统RRT算法应用于机器人路径规划时,由于扩展节点的随机性大,导致求解过程中存在冗余搜索,且生成的路径仅为可通行路径,路径长度以及平滑度并非最优解。针对这些问题,Jian-Quan L等人[9]采用双向RRT算法,从起始点和目标点同时进行扩展,进而提高求解效率。然而双向RRT算法的求解路径平滑度低,不符合机器人运动学规律。朱宏辉等人[10]通过选取最小成本的扩展节点,优化了RRT算法的路径长度,但牺牲了算法的收敛速度,导致搜索时间增加。贺伊琳等人[11]将目标偏向策略引入RRT算法,以固定概率将扩展节点向目标点延伸,减小了随机性,提高了算法的运行效率。值得注意的是,面对复杂场景,基于偏向策略的RRT算法极易陷入局部最小状态。此外,许多学者将RRT与其它智能算法混合,从而提高算法的求解效率。康摇等人[12]结合RRT和滚动窗口算法增强了算法搜索未知空间的能力。Zhou F等人[13]结合RRT和粒子群算法求解最优路径。刘恩海等人[14]提高了RRT算法运用在移动机器人时的避障能力,但是优化过程需要大量运算,导致算法运行效率降低。
本文提出一种基于方向决策的RRT算法,通过引入方向信息决策机制,引导新节点趋向目标点扩展,减小无效迭代次数,进而缩短路径搜索时间。同时,将一种启发式采样策略引入所提算法中,使搜索树能够快速跳出局部最小点,利用三次b样条曲线对规划路径进行平滑处理。最后,通过仿真,验证了本文算法的优越性。
2 双轮差速移动机器人运动模型
在轮式移动机器人中,双轮差动机器人由于结构紧凑、转弯灵活、易于控制等特点,被广泛应用于工业、搜救领域,其运动方式由旋转运动和平移运动组成[15]。
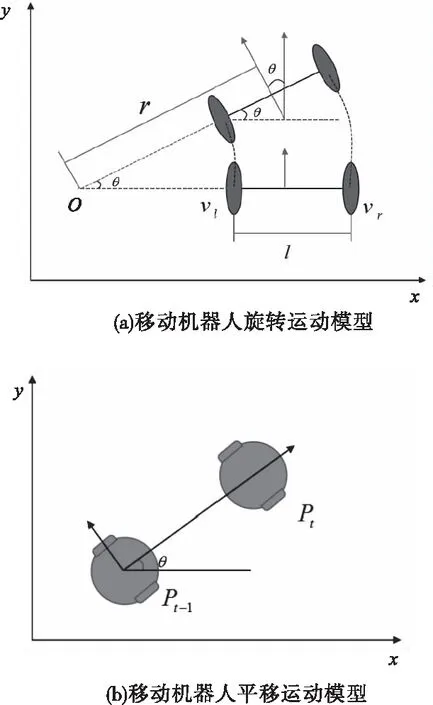
图1 移动机器人运动模型
图1中(a)表示双轮差动机器人旋转运动模型。其中,机器人左轮速度为vl,右轮速度为vr,旋转角度为θ,则机器人线速度和角速度可分别描述为

(1)

(2)
机器人运动半径为
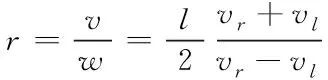
(3)
机器人平移运动模型如图1中(b)所示。设t-1时刻机器人位姿Pt-1=(xt-1,yt-1,θt-1),当Δt时间内机器人以线速度v和角速度w移动,则t时刻移动机器人的位姿可表示为

(4)
移动机器人所有时刻的位姿构成了机器人的实际运行路径。
3 传统RRT算法
传统RRT算法的移动机器人路径规划,采用状态空间内随机采样的方式扩展节点,将搜索树从初始点不断扩展,最终延伸至目标点。将机器人起始位置坐标作为根节点vinit,并在状态空间内随机生成一个随机节点vrand,基于与vrand距离最短原则,搜索树生成新节点vnear。为了形成碰撞判断机制,vnear与vrand的相连形成线段lnear,在lnear上扩展一个测试节点vnew,其扩展步长为给定常数,判断vnew以及lnear是否与障碍物碰撞,若存在碰撞,则放弃当前节点vnear,重新选择,并循环障碍物碰撞判断过程。通过不断构造新的子结点vnew,直到节点vnew与目标节点vgoal之间的距离小于一个扩展步长,且没有发生障碍物碰撞,则扩展随机树构建成功。搜索树的扩展过程如图2所示。

图2 传统RRT算法扩展过程
4 改进RRT算法
4.1 基于方向决策机制
本文改进的RRT算法,为搜索树上的节点引入方向变量orinode,首先确定根节点的orinode参数值为根节点vinit与目标节点vgoal的相对角度偏差值,可表示为

(5)
其中vinit和vgoal的直角坐标分别为(xinit,yinit),(xgoal,ygoal),Δy=(ygoal-yinit),Δx=(xgoal-xinit)。
在搜索树中引入方向变量后,基于启发式采样策略求得随机节点vrand,在搜索树上检索与vrand距离最短的节点vnear。于此同时,获取方向变量orinear,以orinear为基准,在节点vnear添加三个探索式节点vins1、vins2、vins3,添加探索式结点示意图如图3所示。

图3 探索式结点示意图
三个探索结点坐标可分别表示为

(6)


(7)
然后,计算探索式节点与vgoal的距离d,表示为

(8)
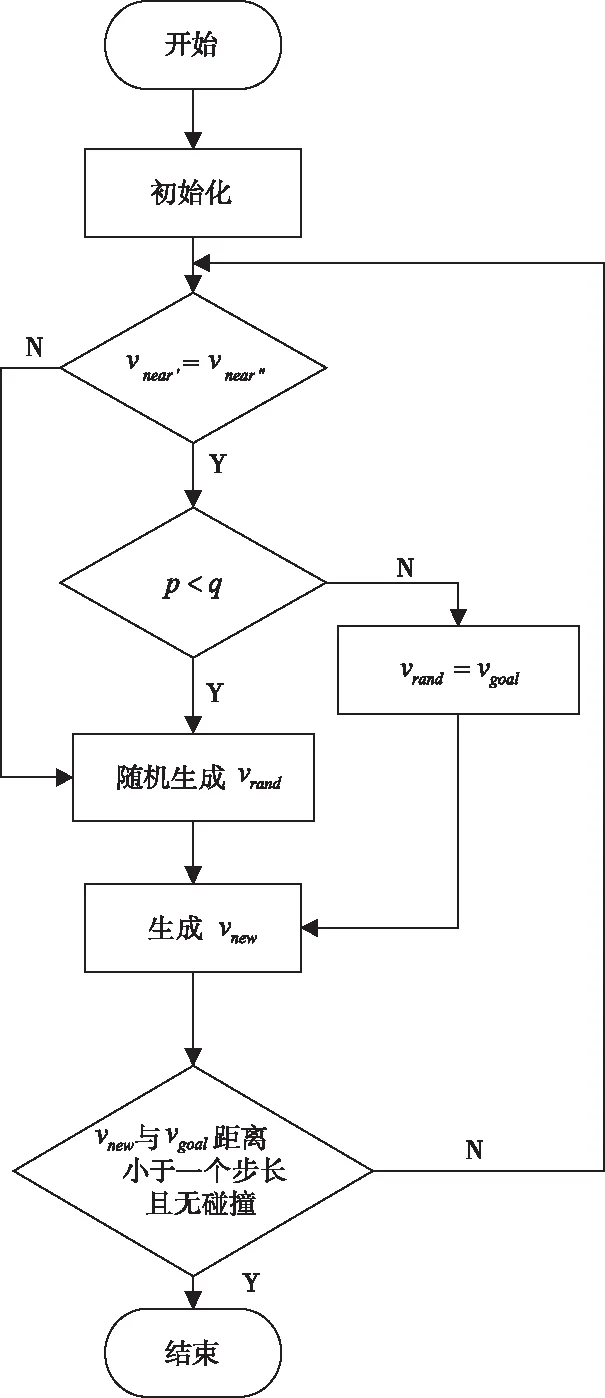
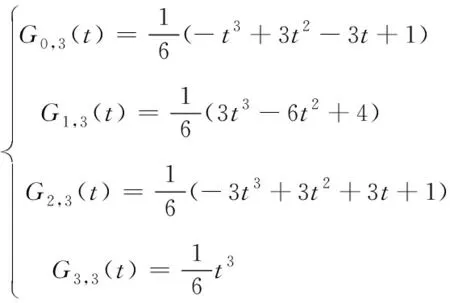
其中,探索节点的直角坐标为(xins,yins),三个探索式节点vins1、vins2、vins3与vgoal的距离分别表示为d1、d2、d3(d1 (9) 使用三个探索节点与搜索树中Vnear节点进行碰撞检测,则反向扩展节点生成vnew,此时vnew的状态如下 (10) 将扩展后的vnew节点加入搜索树。重复执行以上过程,直至vnew与vgoal之间的距离小于一个扩展步长,且无碰撞发生。即可以得到一条从起始点到目标点之间的较优路径规划结果。 图4所示为引入方向变量的RRT算法扩展过程,虚线表示该探索式节点与障碍物发生碰撞,红色结点表示节点vnew,黄色线段为最终求解路径。 图4 改进RRT算法扩展过程 传统RRT算法在移动机器人的路径规划中,存在以下缺点: 1)由于在状态空间中随机选取采样点,求解过程中存在较多冗余扩展,导致算法求解效率低下。 2)面对多障碍物约束环境,特别是狭窄通道时,传统RRT算法的搜索树扩展需要进行大量运算,才能实现路径规划。 本节介绍一种启发式采样策略,保证搜索树向目标节点扩展的同时,也增强了算法对复杂环境的适应性。具体步骤如下: 定义变量vnear′和vnear″分别记录随机树搜索过程中最后两次的扩展节点,定义一个概率阈值变量p。随机生成一个概率值q。如果vnear′等于vnear″,则说明随机树可能陷入局部最小点,则比较p与q的值,然后执行随机采样过程,若vnear′≠vnear″,则判断当前最近点vnear′与vgoal,vnear″与vgoal之间是否发生碰撞,若未发生碰撞,则直接将vrand设定为vgoal,反之则执行随机采样。 融入启发式采样策略后系统整体流程图如图5所示。 图5 启发式采样策略流程图 利用RRT算法求解移动机器人路径规划,虽然可以得到一条无碰撞发生的可通行路径,但生成的路径存在多个折点,导致机器人在移动过程中出现卡顿感。 为了优化生成路径,利用三次B样条插值拟合法对RRT生成的路径进行平滑处理,提升路径的连续性和平滑性。 B样条曲线定义为给定m+n+1个平面内控制点Pi(i=0,1,…,m+n),称n次参数曲线段,可表示为: (11) 这些曲线段的总和称为n次B样条曲线。其中Gi,n(t)为基函数,定义为: (12) 当式(12)中n取3时,即为3次B样条,3次B样条算法的基函数为 (13) 3次B样条算法曲线方程为: (14) 利用3次B样条算法对改进RRT进行路径平滑,图5中(a), (b)分别为3次B样条处理前后的得到的路径。 可见经平滑处理后的路径连续性和平滑性得到了优化。 图6 规划路径平滑前后对比图 利用Matlab2016b在两种环境下对比传统RRT算法、基于目标偏向RRT算法和改进RRT算法的性能。 环境1下实验结果如图7(a),(b),(c)所示,环境2下实验结果如图7(d),(e),(f)所示。环境地图尺寸均为800m×800m,黑色区域表示障碍物,扩展步长S为25m,概率阈值p为0.3。环境1为简单场景,机器人起始点坐标为(50m,50m)点,目标点坐标为(750m,750m)点。环境2为较复杂场景,机器人起始点坐标为(50m,750m)点,目标点坐标为(750m,750m)点。蓝色粗线条为不同算法下机器人的求解规划路径。 图7 算法路径规划结果对比图 从图7中可以看到,在环境1中,传统的RRT算法由于缺乏导向性,仅通过随机采样的方式拓展节点,导致出现大量无效拓展,且求解路径非最优解。而基于目标偏向的RRT算法虽然可以得到一条较优路径,但是当目标点和当前位置的连接线上存在障碍物时,会出现较多无效扩展,从图8中可以看到,在较复杂场景中,传统RRT算法和目标偏向性RRT算法除上述缺点之外,若环境中障碍物较为密集时,会产生更多的无效扩展,而改进RRT算法,能够在进行较少迭代后跳出了这片区域。 图8 算法迭代次数对比图 图8(a)、(b)是以上三种算法的迭代次数对比图,图中可以看出,在两种环境下,本文改进RRT算法均能在较少迭代次数内收敛。 考虑到RRT算法是一种随机性算法,为了验证实验结果具有普遍适应性,分别在两种环境下进行30次试验,得到的平均数据记录于表1表示。 表1 不同环境地图下算法实验结果对比 在场景1中,相比于传统RRT算法,改进RRT算法的迭代次数减少62.6%,求解时间缩短86.9%,路径长度缩短23.1%;相比目标偏向性RRT算法,改进RRT算法的迭代次数减少24.1%,求解时间缩短48.2%,路径长度缩短18.1%。场景2中,相比传统RRT算法,改进RRT算法的迭代次数减少39.5%,求解时间缩短85.4%,路径长度缩短8.4%;相比基于目标偏向性的RRT算法,迭代次数减少50.6%,求解时间缩短79.9%,路径长度缩短9.4%。 在不同复杂程度的场景中,分析三种RRT算法的运行结果,可以看出OIS-RRT算法能以更少的迭代次数,更快的收敛速度求解得到一条更优路径。 为了解决传统RRT算法应用于移动机器人路径规划时扩展随机性强,算法运行效率低,生成路径质量非最优的问题,本文提出一种基于方向决策RRT算法,通过方向变量,引导节点快速向目标点扩展;采用启发式采样策略提升算法在复杂环境下的适应性和避障能力;利用三次B样条曲线优化求解路径,提高了路径质量。通过仿真,验证了本文改进RRT算法能够有效缩短移动机器人求解路径规划的时间,并提升求解路径质量。

4.2 启发式采样策略
4.3 三次B样条曲线拟合





5 实验结果与分析



6 结论