基于改进GSO-BPNN的变风量空调冷却水控制
2022-07-20杨世忠李善伟
杨世忠,逄 铄,李善伟
(青岛理工大学信息与控制工程学院,山东 青岛 266520)
1 引言
近年来,国内外专家对于空调的研究一直聚集提高控制性能,降低能耗的方面,并且提出了许多优秀的控制方法,文献[1]提出了采用比例积分微分控制(Proportional Integral Differential,PID)的方法来对变风量空调进行控制,该控制方法具有良好的稳定性,并且可靠性高。近年来出现了许多新型的智能算法,BP神经网络(BP neural networks,BPNN)、遗传算法(Genetic Aalgorith,GA)也逐渐用于解决PID参数整定的问题。
为了提高变风量空调热舒适的控制效果,文献[2]将鸟群算法与BP神经网络结合,应用于对变风量空调系统末端的热舒适控制,成功提高了预测的精度。文献[3]将细菌觅食算法(Bacterial Foraging Aalgorith,BFA)与粒子群算法(Particle Swarm Optimization,PSO)结合,根据系统偏差来优化参数,从而提高变风量空调系统的性能。文献[4]将萤火虫算法进行改进,并应用于对铁路运行调度算法的的研究中,成功加强了寻找最优调度的效率,并且验证了改进后的萤火虫算法优于标准萤火虫算法。但是,用改进萤火虫算法优化BP神经网络并且应用于PID控制的研究仍然相对较少。
本文在BP神经网络的基础上引入了改进萤火虫算法,利用改进萤火虫算法对BP神经网络的权值和阈值进行优化,从而得到更加合适的PID参数。实验结果表明,这种方法能很好的解决BP神经网络初始参数选择不当以及收敛速度较慢的问题,对空调水系统的控制效果和节能效果也较为明显。
2 被控对象数学模型的建立
2.1 变风量空调冷却水系统结构
冷却水循环系统是将冷却塔、冷却水泵以及冷凝器用管道连接起来,使冷却水流通到冷凝器,从而完成对冷凝器的冷却作用。
冷却水系统的工作原理是通过冷却泵将温度低的冷却水从冷却塔送入冷水机组,完成对冷水机组中冷凝器的冷却。随后高温的冷却水回水重新被送到冷却塔上进行降温喷淋。由于冷却塔内有风扇转动,从而使冷却水与室外的空气不断进行热湿交换,对高温冷却水进行再冷却,又重新送入冷水机组从而进行循环。在系统工作期间由冷水机组进水端的温度传感器和冷却塔出水温度给定值两者作为输入控制冷却塔内变频风机的转速,工作原理图如图1所示。

图1 变风量空调冷却水系统循环工作原理图
2.2 建立系统数学模型
本文的研究对象为变风量空调的冷却水系统,该系统为高阶系统,模型较为复杂,因此可以选用简单的模型来对控制对象进行近似的描述,这里选用带时滞的一阶惯性环节来作为近似描述,这样做可以降低计算的复杂程度,也会改善对象与模型的相位差,同时保证一个较高近似度,传递函数模型如下:

(1)
式中K
为传递函数的放大系数;T
为惯性时间系数;τ
为纯滞后的时间参数。根据青岛理工大学自动化学院变风量空调实验室的历史数据,利用最小二乘法进行系统辨识,对数据进行处理,将模型转换后,可以取K
=0.
0036,T
=566τ
=80,所以当室外湿球温度为29 ℃时,控制对象的传递函数为
(2)
因为该被控对象时变性强,同时具有较强滞后性,因此运用传统的PID控制很难得到满意的控制效果,因此,本文将萤火虫算法与BP神经网络算法相结合,从而改善控制的效果,同时减少能耗。
3 BP神经网络
BP神经网络算法是一种多层前向的神经网络算法,分为输入层,输出层和隐含层,文献[7]中提出了一种经典三层BP神经网络的结构图形,如图2所示。
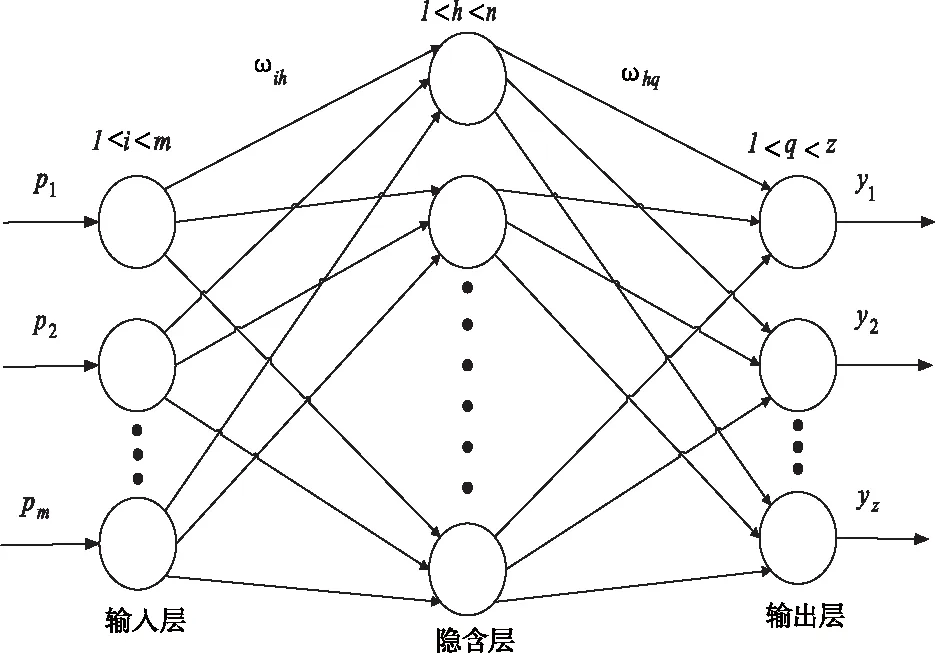
图2 三层BP神经网络结构模型
同时可以映射为f
:R
→R
,数学表达式如下

(3)
该式中ω
为隐含层到输出层的连接权值,b
为隐含层的节点输出,ε
为输出层节点的阈值。

(4)
式中,ω
为输入层到隐含层的连接权值,θ
为隐含层节点的阈值,同时,BP神经网络中的阈值θ
,ε
和连接的权值ω
,ω
能从BP神经网络的训练求得。4 改进萤火虫算法
4.1 基本萤火虫算法

N
,第i
只萤火虫所处的位置为(x
,y
),对应目标函数为f
((x
,y
))那么萤火虫决策半径公式更新如下
(5)



(6)
式中,r
(t
)为第t
代萤火虫i
和j
之间的绝对距离,它们在决策半径内。荧光素更新公式如下
l
(t
+1)=(1-ρ
)l
(t
)+γ
f
(x
(t
+1))(7)
其中,l
(t
+1)为第t
+1代萤火虫i
所含荧光素的值;ρ
为常数,代表荧光素的挥发因子;γ
为常数,代表荧光素更新速率;f
(x
(t
+1))表示萤火虫i
在t
+1次迭代时所对应的目标函数值。萤火虫i
向在邻域集N
(t
)内萤火虫个体j
移动的概率P
(t
)公式为
(8)
萤火虫位置更新公式为

(9)
其中x
(t
)为萤火虫i
在第t
次迭代时的位置,L
为萤火虫i
的移动步长。
4.2 引入惯性权重因子
基本萤火虫算法与其它新兴群算法相同,具有一系列问题,其中最容易出现的问题是在迭代后期存在局部或者全局极值附近反复震荡,在本文中可以借鉴粒子群算法中引入惯性权重的方法来解决此问题。由于迭代过后萤火虫之间彼此吸引从而造成距离减小,个体间相对吸引力增大,从而使移动的距离过大而无法到达稳定的最终极值位置。
惯性权重因子可以通过调节萤火虫个体函数值加强搜索能力,减小算法误差,因此引入惯性权重因子

(10)
式中,ϖ和ϖ分别代表最大权重和最小权重;t
和t
代表当前迭代次数和最大迭代次数。因此改进后的位置更新公式如下

(11)
4.3 进行搜索域更新和随机搜索
由于萤火虫的位置对于GSO算法的精度以及收敛性有着极其重要的影响,但在改进后的萤火虫算法的迭代过程中,假如萤火虫周围不存在其它个体,此时萤火虫会陷入无法移动的状态,这会降低算法的收敛速度和精度,由于存在这种特殊的情况,当萤火虫的邻域集合为空集且此只萤火虫距离最优值的点很远时,在迭代过程中没有其它亮度更高萤火虫进入邻域,那么此时周围个体的荧光素水平会低于该萤火虫,那么周围其它个体便会向该萤火虫移动,从而造成部分萤火虫聚集在一个位置不再移动。
根据以上分析,在提出引入惯性权重的基础上,本文提出搜索域和随机搜索概念,在每次算法更新中,如果萤火虫个体邻域的集合不为空集,那么则按下式进行位置更新

(12)
其中,r
为服从0-1随机均匀分布的数。如果萤火虫个体邻域的集合为空集,那么位置更新公式为
x
(t
+1)=x
(t
+1)(13)
其中x
(t
+1)为当萤火虫领域空间为空时,选择在邻域范围内以当前位置为起点随机搜索M
次而得到的值,其中M
的求值公式如下
(14)
其中,round
()为四舍五入的取整函数,σ
为常数,t
为最大迭代次数,t
为当前迭代次数。因为随着算法迭代次数不断增加,萤火虫算法会更加接近峰值,所以本文中M
设计为随着迭代次数增加而以指数式减小,当迭代次数为算法设置最大迭代次数或接近最大迭代次数时,round
()函数计算结果接近1,M
的结果接近2,从而保证在后期迭代过程中萤火虫也能选择相对较优的位置。在完成M
次搜索以后,适应度函数值最大的位置就是其更新位置,公式如下
(15)
上式保证了萤火虫的搜索域在迭代过程中一定保持在初始位置的决策半径内。
因此最终改进后的位置更新公式为下

(16)
5 改进GSO-BPNN算法优化PID参数
5.1 改进GSO-BPNN设计思想
改进萤火虫算法优化BP神经网络的思路为:根据所要求的输出和输出参数设计BP神经网络的结构,从而确定萤火虫算法中个体的编码长度,每个萤火虫个体都包含了BP神经网络中的权值和阈值,然后通过改进后的萤火虫算法进行萤火虫种群的位置更新,决策半径更新,和荧光素更新,同时根据提出的适应度函数计算萤火虫个体的适应度值,达到寻找目标函数值最优个体的目的。因此获得BP神经网络中更加优秀的初始权值和阈值,再继续根据BP神经网络进行优化处理,得到具备最优解的BP神经网络预测值。
5.2 改进GSO-BPN优化PID参数步骤
经典PID
控制控制器公式为
(17)
其中,e
(t
)=error
(t
)=rin
(t
)-yout
(t
)为稳态误差,u
(t
)为控制输出,K
是比例增益,T
为积分时间常数,T
为微分时间常数。因为要通过改进GSO算法优化BPNN从而完成对PID参数的优化整定,因为选择正则化均方根误差来作为改进GSO算法的适应度函数,此适应度函数收敛速度较快,并且可以较快速平稳的到达最优值,其表达式如下

(18)
上式中,S
为预测样本数目;σ
为时间序列标准方差;t
为第p
个样本的期望输出;y
为第p
个样本的实际输出。基本实现优化的步骤如下:
步骤1:根据需要优化的参数,确定BP神经网络的结构,本文优化对象为PID参数,因此为3输入3输出型BP网络结构,运用改进萤火虫算法进行实数编码,将BP神经网络中的连接权值ω
,ω
和阈值θ
,ε
作为一个整体参数进行编码,其中每一个个体都表示BPNN的全部权值和阈值,并且表示一个BP神经网络的结构。步骤2:随机生成N个萤火虫作为算法中的初始萤火虫种群,设置每只萤火虫的初始荧光素l
,感知半径R
,初始步长s
,最大、最小步长s
和s
,荧光素的更新率γ
和挥发系数ρ
,同时令初始迭代t
=0,设定最大迭代次数t
。步骤3:选择适当的适应度函数,本文选取的适应度函数为正则化均方根误差函数,根据式(7)进行萤火虫的荧光素更新,计算萤火虫在t
代的荧光素值。步骤4:利用轮盘对赌法选择个体j
,当萤火虫i
和j
两者之间的距离小于决策半径时,根据式(8)计算出萤火虫i
向萤火虫j
移动的概率,并且用式(9)进行位置更新,通过适应度函数(18)来计算更新位置后的目标函数值,进而更新全局最优值。步骤5:根据式(5)进行决策半径的更新。
步骤6:若迭代达到最大设定数t
或者精度满足用户要求,则程序完成;否则返回步骤3。步骤7:通过改进GSO算法优化得到的结果确定BPNN的权值和阈值,作为BP神经网络预测模型的初始连接权值和阈值。
步骤8:根据确定的BP神经网络的结构,即确定的输入层节点数、隐含层节点数和输出层节点数,选定合适的学习速率η和惯性系数α,再根据改进萤火虫算法得到的BPNN的连接权值和阈值对BPNN预测网络进行训练。
K
、T
和T
三个可调参数。步骤11:进行系统训练,调整神经网络系统参数,同时优化PID参数。
步骤12:最终得到最优的PID可调控制参数,将其输入仿真图进行图像观察。
经过改进GSO-BPNN算法优化过后的控制原理图如图3所示。

图3 改进GSO-BPNN优化PID原理图
6 仿真与实验
6.1 算法编码及参数设置
改进萤火虫算法的编码过程为:在改进萤火虫神经网络训练时,每个萤火虫个体都代表神经网络各层的连接权值ω
,ω
和阈值θ
,ε
,编码采用实数编码,按照输入层到隐含层连接权值、隐含层阈值、隐含层到输出层连接权值、输出层阈值的顺序来编码。定义萤火虫种群规模为50,最大迭代次数t
=100,荧光素浓度l
=5,荧光素挥发因子ρ
=0.
4,感知半径R
=3,经过每一代的移动,最终使得萤火虫聚集在拥有较好目标值的个体周围。6.2 仿真研究
为了体现本文所述算法优化的优越性,通过仿真来进行对比,基本萤火虫算法优化BP神经网络与改进萤火虫优化BP神经网络,从而改善PID控制器参数后的仿真对比如图4所示,适应度曲线如图5图6所示。

图4 PID控制响应曲线对比图

图5 初始萤火虫算法迭代过程图

图6 改进萤火虫算法迭代过程图
根据图4的对比可以看出,对比于基本GSO-BPNN对PID参数的调整,改进后的GSO-BPNN虽然没有使系统的动态响应有较大改变,但明显可见超调量和达到稳定的时间都有明显的减小,根据图5和图6比较发现训练误差有所下降,达到稳定的代数也明显减少,因此本本文提出的控制方法可以改善控制的质量。
将基本GSP-BPNN和改进GSO-BPNN优化过后的PID控制参数输入到青岛理工大学变风量空调实验室的系统中进行调试,实验室实际图如图7所示,在夏季运行的情况下对两种不同算法选取上午8点到下午6点的多组系统能耗数据进行冷却水系统能耗对比,对比图如图8所示。

图7 青岛理工大学变风量空调实验室现场图

图8 能耗对比图
由图8可知,对比初始的系统能耗,改进GSO-BPNN优化控制具有一定的节能效果。
7 结束语
根据变风量空调冷却水系统的特点,本文提出了一种改进GSO-BPNN的控制方法,有效改善了传统PID控制存在的弊端以及基本GSO算法后期容易陷入震荡和局部最优的问题。仿真和实验结果表明,变风量空调冷却水系统的改进GSO-BPNN优化控制能有效调整冷却塔风机频率,提高控制效果,同时,有一定的节能效果。