基于快速SLIC的人工智能图像超像素分割仿真
2022-07-20陈进强黄继梅
陈进强,黄继梅
(1. 南昌大学共青学院,江西 九江 332020;2. 南昌航空大学科技学院,江西 九江 332020)
1 引言
信息时代的到来打破了各领域人工智能的发展瓶颈。现如今,人工智能不仅具有较强的学习能力,而且在不断的学习中,面向相对复杂的工作也给出了正确、有效的决断。图像是当前的一种主流交互形式,其融合、分割技术在图像处理领域中具有至关重要的作用。其中,图像分割是根据颜色、几何形状以及纹理等特征属性,针对性地划分图像的不同区域,作为图像高级处理的关键技术与必要条件之一,图像分割始终是一个最具研究性的课题。
国外为开展图像分割技术研究,建立了多个专业实验室,比如宾夕法尼亚大学的视觉分析与仿真技术实验室、加利福尼亚大学的可视化与智能系统实验室等。而国内在探索图像分割的进程中也取得了显著成果,例如:刘国华等人完成图像空洞修复后,利用深度信息下的线性谱聚类核函数,得到超像素分割算法;张志龙等人根据局部区域像素密度,遍历归属关系树的超像素种子,分配超像素标记,实现超像素分割。但是,尽管文献方法在一定程度上提升了分割精准度,但仍然无法满足用户的智能化、实时性需求。
为此,本文根据快速SLIC算法,设计人工智能图像超像素快速分割方法。作为一种高综合性的预分割策略,快速SLIC算法得到的超像素相对密实、均匀,其运算速度与边缘保持等能力也相对理想;基于快速SLIC算法,通过标记周围邻域标签,设计出快速聚类算法,既有助于确保分割质量,也能够提升分割效率;通过用户交互阶段与相似度度量阶段,令超像素相似部分实现人工智能自适应合并,使图像分割完全。
2 基于邻域标记的快速SLIC算法
在确保分割质量的前提下实现更高效的分割,本研究基于快速SLIC算法,构建出邻域标记下的简单线性迭代快速聚类算法。
2.1 邻域标记
将像素点分类图1中β窗格的约束像素点选取为四个,完成RGB空间与CIE Lab空间的转换,得到初始化种子点;根据得到的簇中心与像素间的关系特征,划分全部像素点为两种窗格α、β,像素点标签的标记顺序为由上至下、由左至右,标记间隔为一个像素点,经标记的全部像素点即为β窗格,其余像素点为α窗格。由左下角框中的两窗格占比可知,该算法需标记二分之一的像素点;由右下角框中的两窗格占比可知,β窗格的像素点周围均存在四个α窗格(除首末行与首末列),即α窗格对中间的β窗格有约束作用。
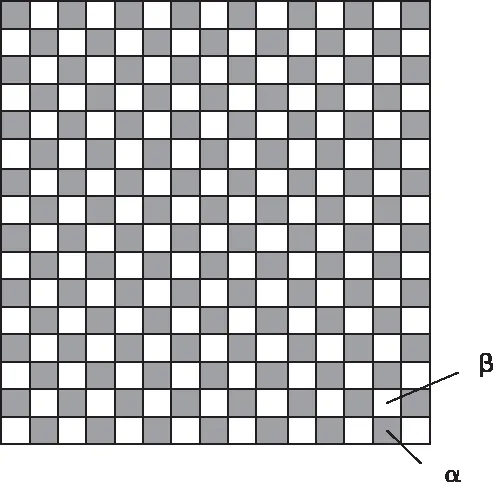
图1 像素点类别划分示意图
当为β
窗格的超像素标记标签时,存在以下四种类别划分状况:1)周围标签完全不同:β
窗格像素点有四个簇中心C
、C
、C
、C
,像素点i
与四个簇中心的五维空间距离如下所示,运算次数为四次
(1)
该公式里,CIE
Lab
颜色空间中像素点与簇中心之间的欧几里得距离为d
(i
,C
),而对于CIE
Lab
颜色方位而言,两点之间的欧几里得距离为d
(i
,C
),λ
为修正因子,该因子可调整空间距离与颜色距离之间的占比。2)存在两个相同标签:β
窗格像素点有三个簇中心C
、C
、C
,同理,得到像素点i
与三个簇中心的五维空间距离,运算次数为三次;3)存在三个相同标签:同上可知,运算次数为两次;
4)周围标签完全相同:无需运算,直接将邻域标签标记至β
窗格。经过聚类全部归属β
窗格的像素点,更新簇中心,再次聚类至满足预设的阈值条件,优化超像素间的连通性。2.2 快速SLIC
以往的SLIC算法通常利用平面空间与CIE Lab颜色空间的五维特征加权和来求取相似度。限定像素点遍历范围是2S*2S,一旦像素点超出该范围,即判定该像素点不归属该簇。
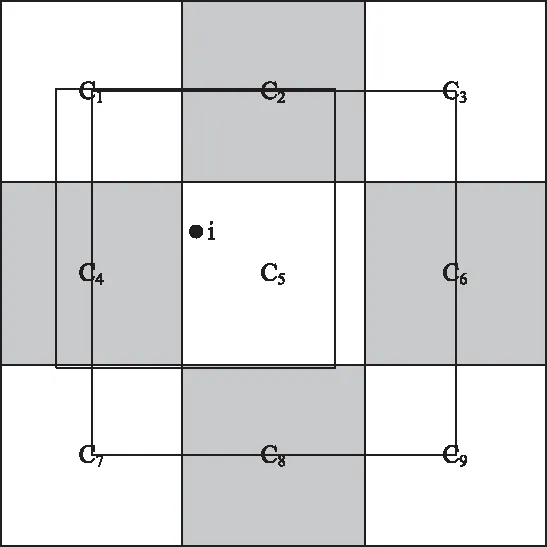
图2 传统算法下相似度求解次数示意图
以图2为例,各窗格均为一个初始簇,像素点i
位于C
所在簇,以该点为中心的2S
*2S
范围中涵盖C
、C
、C
以及C
四个簇中心,则对于像素点i
的相似性度量需经四次运算;如果像素点i
与簇中心C
重合,则该点的遍历区域包含簇中心C
及其八近邻簇中心,故此时像素点i
相似性的计算次数为九次。综上所述,传统SLIC
算法在求解各像素点相似度时的运算次数最高可达九次。假设各像素点运算平均次数的数学期望值为E
,E
的计算公式如下所示
(2)
式中,θ
表示像素点i
的八邻域像素集合,c
指代像素点的相似度度量次数,p
代表的是图像基准值中的目标边缘像素点。而关于邻域标记下的简单线性迭代快速聚类算法,其α
窗格像素点的分类模式同传统算法一样,但占比为二分之一的β
窗格像素点,其相似度度量最多只需四次计算,因此,有助于大幅提升快速聚类算法的分割效率。假设各像素点运算平均次数的数学期望值是E
′,则计算公式如下所示



(3)
若算法递归次数为G
,图像像素点总个数为I
,则传统算法与快速算法的时间复杂度分别为O
(GIE
)、O
′(GIE
′),由此可知,时间复杂度随着数学期望的下降而减小,因此,本文构建的快速聚类算法具有一定的加速作用。3 人工智能图像超像素分割
利用所提的快速SLIC
算法,取得原始分割图像后,通过以下三个步骤,完成超像素相似部分的人工智能自适应合并,进一步令图像分割完全:1)用户交互:以用户需求为根本,在获取的原始分割图像中,区分开背景部分与目标部分。设定T
为超像素原始分割部分集合,T
与T
分别指代目标超像素集与背景超像素集,T
表示其它超像素集,故各集合间的关系表达式如下所示T
=T
∪T
∪T
(4)
2)不同图像部分的相似度衡量:根据颜色直方图反映各部分图像特征,呈现目标部分颜色特征,以此作为合并准则,基于RGB颜色空间,求解超像素部分的颜色直方图。平均量化处理颜色空间里各通道为a级,得到各图像部分的色级数量a,采用Compare Hist函数计算各部分相似度,下式所示为该相似系数界定公式

(5)

T
,最大程度合并背景超像素部分T
与其它超像素部分T
,直到背景部分合并完全。自适应合并流程分为背景部分合并阶段、其它部分合并阶段,经迭代循环处理,待所有部分完成合并时,迭代停止,具体描述如下:

(6)


(7)
迭代操作两个合并阶段,待无可合并区域时,停止循环处理,取得图像中完整的目标部分与背景部分,完成图像超像素分割。
4 实验设计
4.1实验环境
按表1所示的参数配置搭建实验环境。

表1 实验环境软硬件配置参数
4.2 不同方法的图像超像素分割视觉效果
在BSDS500数据库中选取待分割图像目标,统一图像规格为326*484,利用Pr
oteus仿真软件模拟文献方法与本文方法进行分割,得到零噪声图像超像素分割结果。通过对比文献方法与本文方法的零噪声图像超像素分割结果可以看出,本文方法相较于文献方法的分割质量更高,分割线与目标背景分界线较为拟合,即使是色彩界线不明显的部分,仍具有较好的分割效果。这是因为本文利用颜色直方图精准反映了图像的各部分特征,呈现出目标部分的颜色特征,将其作为合并准则后,基于RGB颜色空间,解得了超像素部分的颜色直方图,基于恒定的目标超像素集,使背景超像素部分与其它超像素部分得以最大程度合并。

图3 初始图像

图4 本文方法的分割结果
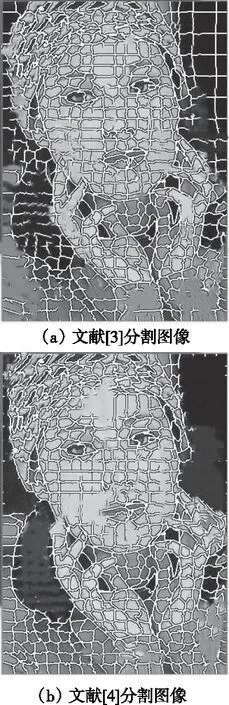
图5 传统方法分割结果
4.3 不同方法评价结果
为检验方法分割性能,将高斯、椒盐等不同种类噪声添加至无噪图像中,并对含带各类噪音的图像展开分割仿真。采用峰值信噪比与分割耗时两指标,量化分析文献方法与本文方法的噪声免疫性能与实时性能,各指标实验结果分别如图6、图7所示。

图6 不同方法的噪声免疫性能
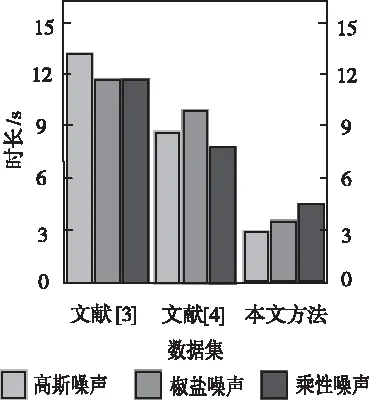
图7 不同方法的分割实时性能
根据图6、7中峰值信噪比与分割时长的指标数据变化情况可以看出,对比文献方法,本文方法以邻域为基准,把标签标记在各窗格超像素上,经过聚类全部窗格像素点来更新簇中心,优化了超像素间的连通性,因此,极大程度降低了各类噪声对本文方法的影响程度,且较文献[4]更具稳定性;尽管分割时长随噪声类型的更改略有浮动,但由于本文算法在度量部分窗格像素点的相似度时,最多只需四次计算,分割耗时远低于文献方法时长,具有较高的分割实时性。
5 结论
计算机技术水平大幅提升,令人工智能在诸多重要领域得到广泛应用,比如医学、军事等,尤其在汇集了图像配准、图像压缩、图像重建等技术的计算机视觉领域中,更是占据着至关重要的位置。计算机视觉领域中,图像分割也是主要研究课题之一,其重要性随着自动驾驶、智能机器人等智能应用的飞快发展而与日俱增。作为一种像素级别的类别划分策略,图像分割更具复杂性,有助于深度理解图像信息。本文方法中存在的部分手动设定参数会影响分割质量,设计一种自适应参数算法或归一化分割方法将成为下一阶段的探索方向;为有效拓展方法的普及应用,需创建客观性较强的分割评价模型,定量评估图像分割效果,完善分割性能;今后应针对图像纹理特征的相似性展开计算,使图像信息得到更准确的分割。