核反应堆压力容器主螺栓检测装置系统设计*
2022-07-20国核电站运行服务技术有限公司沈杰赵琛赵晓敏王一帆
国核电站运行服务技术有限公司 沈杰 赵琛 赵晓敏 王一帆
核反应堆压力容器主螺栓是连接核反应堆压力容器顶盖与筒体的紧固密封件,属于受力易损部件,对其需进行定期的缺陷检测。本文基于PLC 与EtherCat 总线控制,采用分布式控制的方案,通过总线传输运动控制的命令,由下层的智能伺服驱动模块完成对应的各轴运动,同时有效保证主螺栓缺陷定位的准确性。
1 系统方案设计
1.1 研究背景
反应堆压力容器主螺栓主螺母是反应堆压力容器本体和顶盖之间的连接紧固件,长期处于高温高辐照环境之下,在其制造或换料大修期间,需对其结构如是否存在损伤裂纹进行检测评估。本系统设计不仅优化机械装置,使其可适应不同规格螺栓,如AP1000、CAP1400 等,而且采用集成度更高的BECKHOFF 总线模块、Elmo 驱动模块等,大大简化了系统的结构和控制系统,提高便携性和操控灵活。
1.2 系统结构设计
整个主螺栓检测装置大致可分为:底座支撑装置、抱紧装置、运动装置、供水装置。如图1 所示。
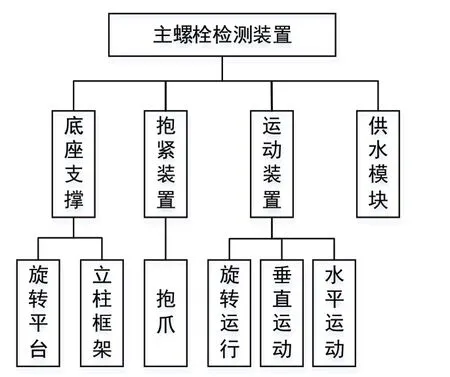
图1 主螺栓监测装置系统结构图Fig.1 System structure diagram of main bolt monitoring device
(1)底座支撑装置由底座旋转平台及立柱框架组成,为整个机械装置及被检件(主螺栓)提供支撑,底座增加了一定的配重,且安装有4 个可调整水平并固定的万向地脚螺栓。(2)抱紧装置位于放置螺栓中部区域,其可有效防止螺栓旋转时发生倾覆,使得螺栓位于转台组件中心以确保运动平稳,使探超声头沿螺栓孔下降过程中,保证其垂直性,促使探头夹具的运动以及检测信号采集的稳定可靠。(3)运动装置包括三部分:1)旋转运动:底座转台组件包含主运动电机及减速器和中空的旋转支撑平台,其中减速器和旋转支撑平台之间采用齿轮传动,保证传动精度;2)垂直运动:配一有刷电机并通过齿轮齿条进行传动,从而带动导杆进行竖直方向运动,探头从螺栓中心孔传入,随导杆运动至螺栓底部,其上配有传感器,以保障其向下运动的安全性;3)水平运动:可调水平装置,需保证与立柱垂直性,在驱动水平导杆垂直运动时,左右两端和自动对中位置均安装有检测传感器,已达到螺栓放入底座上即可自动对中的要求。(4)供水装置通过供水箱供水与回收,蠕动泵将水位升至所需高度作为耦合剂,通过正反转并切换不同水路以达到供水和排水。供水组件管道与阀门集成于立柱框架上,运输方便。检测时通过立柱框架上安装的摄像头以及旋转装置底部液位传感器实时检测水位,以控制水泵的启停。
2 电气控制系统设计
2.1 系统框图
本系统所用驱动器可通过其自身含有的网络接口接入系统,实现EtherCat 总线控制,如图2 所示。其中嵌入式控制器CX9020 作为EtherCat 网络中的主站,Gold Twitter 驱动器作为EtherCat 从站,依次连接,实现分布式控制。同时,PLC 控制器通过网线与控制电脑连接,通讯协议为TCP/IP,装置顶部的高清摄像头也通过网线与控制电脑连接实现实时监控,本系统中控制部分所采用均为总线模块,如IO 模块、通讯模块、模拟量输入输出模块等,其扩展性极强,为后续功能的添加预留了空间。
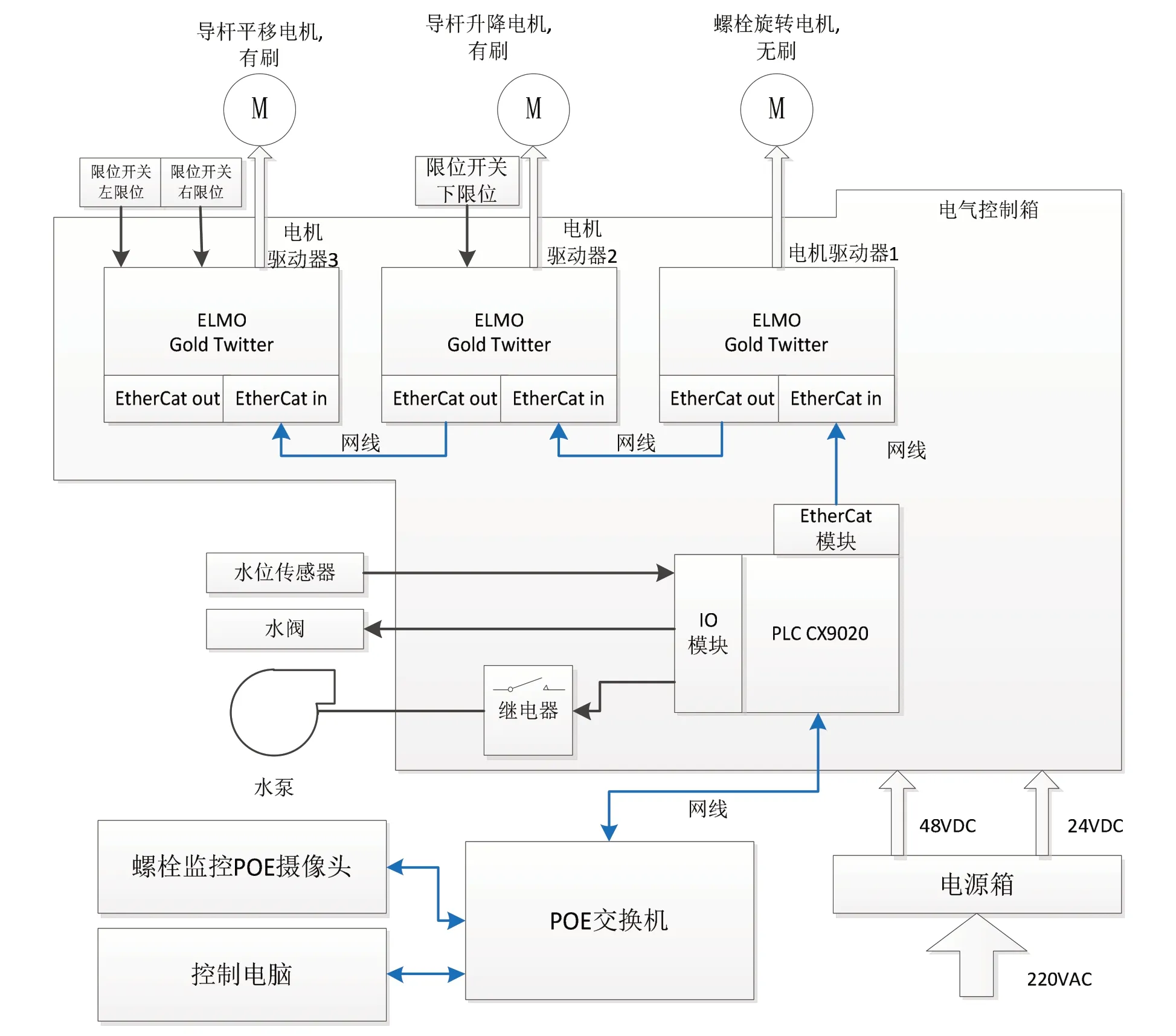
图2 系统框图Fig.2 System block diagram
2.2 系统控制
控制部分主要分电机运动控制,耦合剂供给控制,网络监控。
(1)运动控制部分主要包括:控制单元和Elmo 伺服驱动单元两部分。控制单元为一款导轨式安装的紧凑型以太网控制器和总线模块等,其强大的运算能力,可迅速完成电机编码器信息的处理,外围模拟量采集运算,位置闭环功能等。特点如下:
1)可挂载最大256 个IO 模块;
2)ARM Cortex™-A8 CPU,1GHz;
3)Microsoft Windows CE 操作系统;
4)4ms 扫描周期。
Elmo 驱动器可降低动力回路与功率元件的负荷,兼具抗电磁噪声干扰等功能,其连续功率输出:975W,最大输出电压高达直流母线电压的96%,支持EtherCat 总线。电机自整定功能可使电机优化至最佳,有效防止输入的PID 参数误差过大,造成电机发热等问题,所采用位置闭环控制,利用负反馈,使运动速度在工作允许范围内连续可调,且定位精准,同时使超声探头所采集的信号具有高信噪比便于分析。本系统采用的分布式控制将功能集中到不同的控制模块中,且体积更小,不但减小了现场电缆的数量,更可为设备的维护节省时间成本。
(2)耦合剂供给控制:在实际超声检测过程中,要保证螺栓孔水位始终高于检测探头,否则超声信号将不达标。在检测过程中,水位会随探头下降而溢出螺栓,考虑到其具有一定的放射性,需要水位高度跟随探头下降而实时变化。
主螺栓以去离子水作为超声耦合剂,如图3 所示。选用可远程控制转速的水泵,Modbus 通讯,通过AO 模拟量输出控制水流速度,控制器接收压力传感器反馈的数值,配合排水与补水水路的切换,以及水泵正转与反转可实时控制水位高低变换,以实现闭环控制,且可有效防止水流溢出螺栓孔。
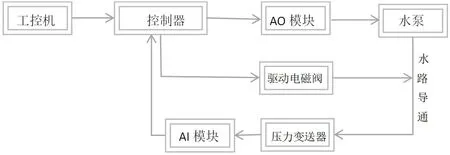
图3 供水原理图Fig.3 Schematic diagram of water supply
(3)网络监控:由于主螺栓属于核一级部件,所用去离子水沾染放射性,现场工作人员采用远程监控操作,设备中使用的POE 相机,通过浏览器显示相机的实时图像。
3 软件系统设计
控制软件分为PLC 内部程序与上位机控制程序两部分构成,如图4 所示。通过TWINCAT 实现PLC 与上位机的通讯,PLC 内部使用TwinCat3 进行编程,主要使用结构化文本编写,实现主要功能为,驱动器的控制及状态查询,IO 模块的控制。上位机控制软件主要实现图形化的人机控制界面,使用BECKHOFF 自带TwinCAT.Ads.dll 实现与PLC 的相互通讯。编程语言使用C#,通过读取或更改PLC 的内部变量值实现对PLC 控制及监控。
程序功能框图如图4 所示。
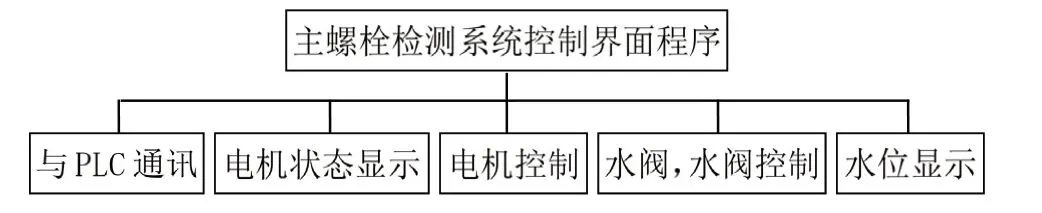
图4 程序功能框图Fig.4 Program function block diagram
内部程序有如下几个功能模块:
电机点动模块(JOG):用于电机的点动操作;
电机运动模块(Motion):用于电机的绝对位移及相对位移操作;
电机使能模块(Servo):用于电机的下使能;
错误复位模块(Reset):用于电机的错误复位制作;
电机停止模块(STOP):用于电机的停止/急停操作;
扫查模块(Scan):用于实现扫查运动;
置位模块(Set Position):用于电机的置位操作;
限位停止模块(Limit Stop):用于电机到达限位时停止;
水位控制模块(Water):用于超声检测水位控制。
4 结语
主螺栓超声涡流检测主要是针对其在核电特殊环境运行后产生的周向应力腐蚀裂纹和疲劳裂纹等缺陷。此开发的检测装置可以携带超声探头准确的进入螺栓中心孔内,通过装置底部的旋转平台和垂直扫查机构的步进实现螺栓的自动超声检查,同步可进行螺栓上下端部涡流扫查。超声涡流检测一体,超声检测杆良好的对中能力,自动检测运动及供水控制,系统的可操作性,极大的提高工作效率。
同时电气控制箱内部良好接地,电机输出端进行磁环降噪,减小电磁干扰,同轴信号线缆的最外层屏蔽两端分别接MS5800 仪器外壳和装置外壳(接地),有效的屏蔽自动检测装置的噪声输入。通过采用上述噪声屏蔽方法,在螺栓的检测灵敏度下,噪声信号远远小于10%的满屏高度,信噪比达到了20dB 以上。
引用
[1] 陈智聪,任剑波,朱佳震.核电厂主螺栓超声检测与信号分析[J].核动力工程,2020,41(3):164-169.
[2] 林天龙,孙宇,文小军,等.反应堆压力容器主螺栓拉伸装置设计分析[J]. 装备制造技术,2018(11):39-43.
[3] 李文霏.整体螺栓拉伸机的系统设计与研究[D].厦门:厦门大学,2017.
[4] 王晓翔,常楠,孙茂荣,等.核反应堆压力容器主螺栓、主螺母涡流检测技术[J].无损探伤,2015,39(1):25-27.
[5] 周晨曦,黄金勇.反应堆压力容器单体螺栓拉伸机故障分析与处理[J].电工技术,2021(10):67-68.
