基于VisualOne直连PLC虚拟仿真系统设计
2022-07-16任晓敏
任晓敏
基于VisualOne直连PLC虚拟仿真系统设计
任晓敏
(西安航空职业技术学院,陕西 西安 710089)
为提高PLC的教学效果,文章运用虚拟仿真软件进行PLC项目设计调试,以组成三维场景的虚拟设备为控制对象,通过PLC编程、机器人编程、通信连接,利用PLC高级仿真软件,实现虚拟仿真设备与PLC之间的数据交换,可直观地展现三维场景下工业生产线自动化控制系统的实时运行过程,不仅能够体现与实际生产线一致的物理性能,而且对于机械结构动作与PLC实现并行设计,为PLC实践教学方面提供了更为广阔的发展空间。
虚拟仿真;数据交换;生产线;并行设计
引言
可编程逻辑控制器(PLC)在工业自动化控制方面能够有效地完成各类顺序控制,例如货物搬运机械手控制系统、智能物流分拣生产线控制系统等,在工业场合应用较为广泛,在PLC教学方面形成了许多典型的教学案例,然而一般工科院校在PLC教学实践过程中对于程序调试常常局限于设备厂家所提供的控制模块设备,例如电机模块、交通灯模块、机械手模块等。针对PLC的各类指令练习时,控制要求则需要根据这些模块进行提出,而不能灵活地去更改控制要求,也就是说如果更改控制要求之后就可能没有相对应的控制模块与控制要求进行匹配,因此在对系统调试过程往往是通过PLC状态指示的灯亮灭来判断程序是否满足其控制要求[1]。目前大多数PLC软件只是单纯地对PLC程序本身的逻辑关系进行验证,缺少PLC程序与设备之间综合运用时逻辑关系的验证[2]。这对于初次接触PLC的学生来说,在遇到控制要求较为复杂的情况时,通过观察PLC状态指示灯的变化来验证程序是否正确就会觉得比较困难,由于调试现象不明显可能导致学生的设计思路不连贯,思维受到一定限制,不能有效地激发学生的学习兴趣,学习效果不佳。除此以外,在PLC程序调试过程中,有时避免不了由于学生疏忽或操作不当造成PLC设备损坏的可能[3]。结合在PLC教学中可能出现的问题,采用虚拟仿真技术就可以有效解决PLC在教学实践中出现诸如以上问题。
本文是基于VisualOne虚拟仿真软件建立虚拟仿真被控对象,在完成PLC编程的同时增加了现代数字化工厂中的一个环节——智能制造自动生产线控制系统,建立进阶式虚拟工业场景[4],通过PLC实现对工业生产线的工艺流程控制,在监控虚拟工业生产线智能终端的同时,优化与完善PLC的教学验证环节,更新教学实践改革手段,满足学生在自动控制方面创新的需求。
1 PLC虚拟仿真系统设计方案
VisualOne是一种全方位工业智能制造虚拟仿真系统,可为PLC提供三维仿真场景下的验证功能,还可以与真实硬件PLC实时连接,对较为复杂的生产线可进行虚拟调试,不仅能有效减轻现场调试的工作量,还能最大限度地缩短调试时间[5]。Visualone与PLC结合实现的教学案例种类较多,既可以进行半实物仿真,也可以实现全虚拟仿真[6]。本文是以全虚拟仿真实际生产线作为被控对象,以PLC为控制核心设计PLC虚拟仿真系统,具体设计内容包括虚拟控制对象模块、PLC控制模块、虚拟PLC模块三部分,PLC虚拟仿真系统总体设计框图如图1所示。
(1)虚拟控制对象模块:在虚拟仿真环境下正确配置各类控制对象,根据控制要求对所需设备可进行选择或建模,结合实际的工业生产线对各类设备进行合理布局,确定相关变量;为了简化PLC程序编写内容,减少较为繁琐的路径规划编程工作,可通过选择路径或者直接生成路径对输送线上的机器人动作过程完成编程操作,建立虚拟设备与控制系统之间的通讯连接。
(2)PLC控制模块:根据控制要求,PLC控制模块需要完成输入、输出变量的分配和梯形图程序的编写,本次PLC软件选择支持S7-1200 PLC的博途软件。
(3)虚拟PLC模块:将西门子PLC高级仿真软件作为PLC与虚拟仿真控制对象之间的“桥梁”,通过S7-1200 PLC与虚拟设备模型之间的配置,实现PLC与虚拟仿真对象的数据交换,进行PLC与虚拟仿真设备之间的有效连接,从而达到PLC控制虚拟设备动态仿真的效果。

图1 虚拟仿真系统总体设计框图
2 PLC虚拟仿真实训项目设计
VisualOne虚拟仿真软件具有虚实结合功能和协同工作的特点,可有效地验证或模拟工业环境下控制系统运行过程,特别是在自动生产线的布局设计、画面监控等方面应用较多[7],例如检测产品出库、入库的数量,控制机器人的取料与放料等。选用VisualOne所提供丰富的模型库中的设备三维模型或建模所需零件,搭建满足控制要求并与实际生产线匹配的场景,利用其直观、灵活、高效等优点,可有效解决PLC教学中控制对象较为单一的问题[8]。这里以自动生产线的人工分拣线控制实训项目为例,简述PLC虚拟仿真系统设计的过程,其主要设计内容如图2所示。
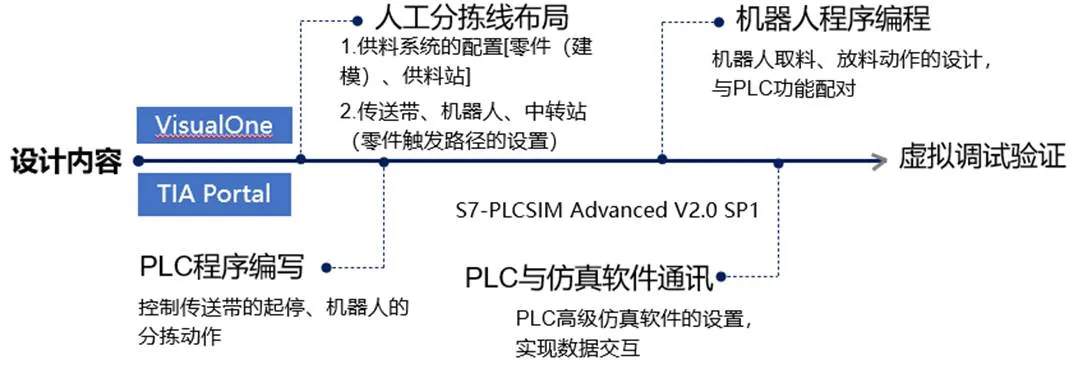
图2 PLC虚拟仿真系统实例设计内容
2.1 创建人工分拣线的虚拟场景
根据控制要求,首先对人工分拣线仿真模拟系统进行工程规划、工艺分析;接着创建人工搬运线的场景,选用各类组件,将零件、机器人、传送带、供料站、中转站、按钮等组件进行导入,合理摆放组件并定位,完成人工分拣线的布局如图3所示。
当各个组件布置完成之后,还需对供料系统进行设计,以简化PLC程序设计内容,供料系统设计需要满足供料站提供给第一个传送带不同的零件,当零件到达第一个传送带末端的中转站时,通过中转站的程序设置进入中转站的零件个数,保证中转站只出现一个零件,从而有效地将真实的被控对象进行软件化设置。

图3 人工分拣线的布局
2.2 编写机器人程序
在VisualOne虚拟仿真软件的“程序编辑器”面板上完成机器人有关动作的编程设计,编写主程序与模块化子程序,子程序是完成每种零件被抓取、放置的动作,在主程序中调用子程序便可实现机器人在每个传送带取料和放料过程,为PLC反馈给机器人的状态做准备工作。机器人工作的主程序如图4所示,零件信息设置R1等于111,表示一种零件,R1值等于222时,表示另一种零件;设置R2是PLC将获得R1的值(零件信息)传送到R2,并发送给机器人,机器人根据R2的值进行零件的分拣;R3表示机器人的状态,1代表机器人处于忙碌状态,0代表机器人处于空闲状态。
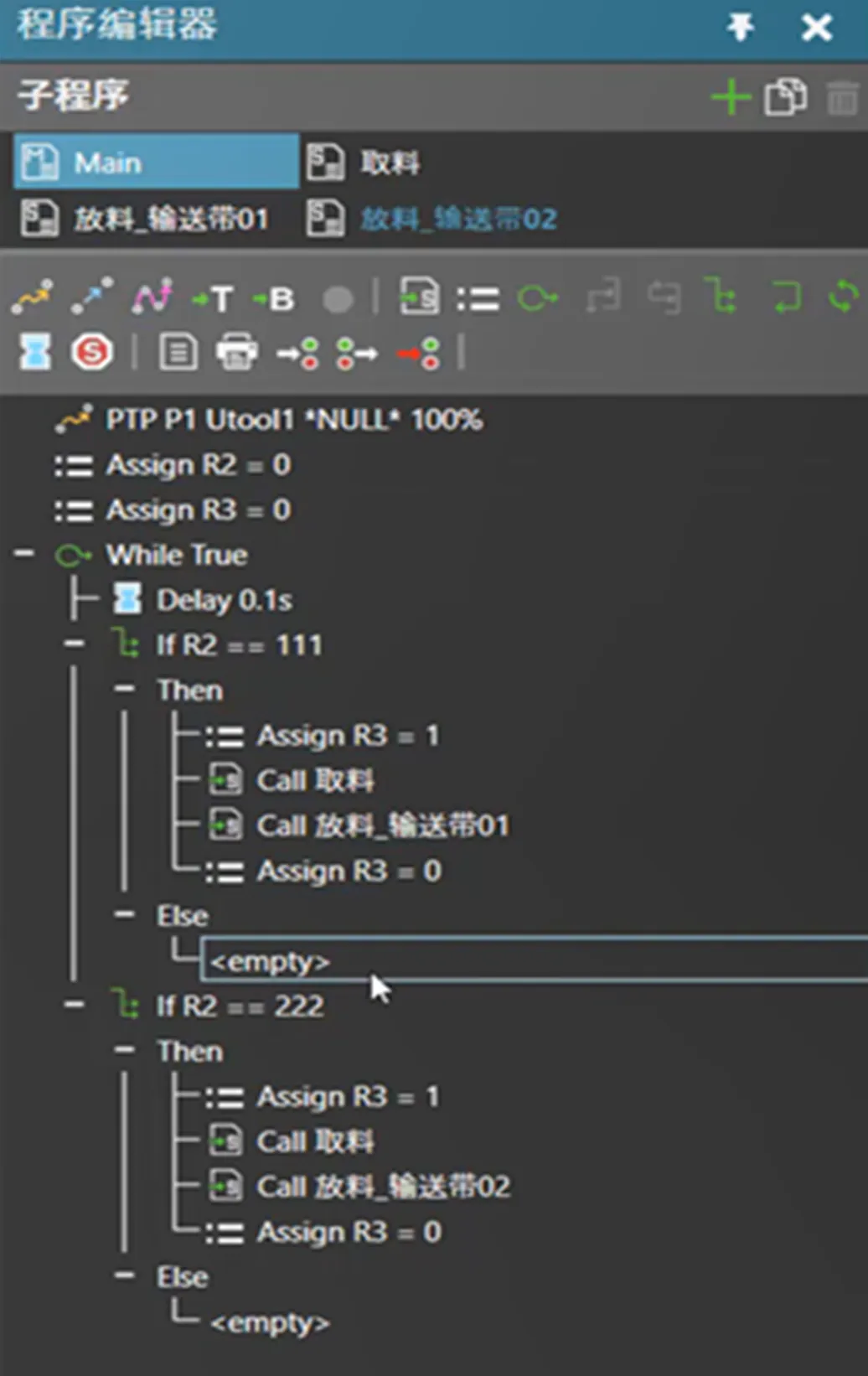
图4 机器人工作的主程序
2.3 编写PLC程序
PLC设计部分主要控制人工分拣线中传送带的起停控制和机器人的分拣动作,其中传送带的起停控制较为简单,这里针对机器人的分拣动作设计做详细说明。PLC一方面需要从中转站获取零件信息,将零件信息的状态存储在寄存器里,并对零件信息完成属性设置;另一方面PLC将获取零件的信息发送给机器人,并判断机器人的状态,机器人根据寄存器的信息对零件进行分拣。根据控制要求确定输入与输出变量,变量是虚拟仿真软件与PLC进行数据交换的媒介,这里对PLC添加模拟外界开关信号,需要位存储器M来实现[9],因此本例针对控制对象设置数据块DB,建立全局变量,分别设置起动按钮M3.0、停止按钮M3.1、复位按钮M3.2,实现被控虚拟仿真对象与PLC的数据联系。
编写PLC梯形图实现机器人分拣动作即将第一条传送带根据零件不同分拣到第二、三条传送带上,在博途软件中应用比较指令来判断机器人的状态,通过获取存储零件信息,利用传送指令让机器人分拣不同的零件,S7-1200 PLC指令丰富,编程模式较为灵活,因此这里的编程方法不是唯一的,可以根据所学内容自行设计程序。PLC控制机器人分拣零件的部分程序如图5所示。
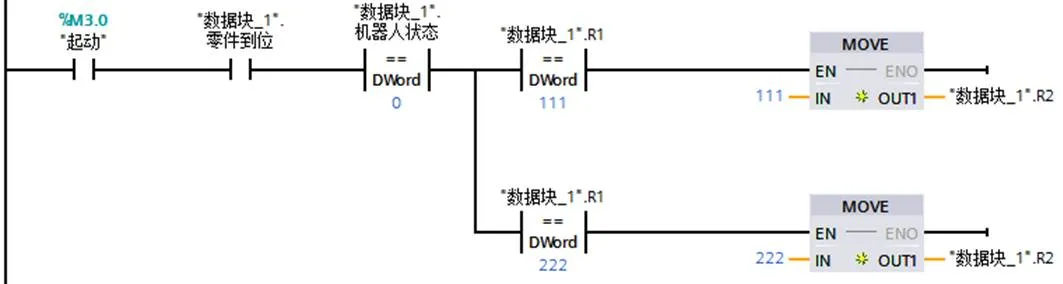
图5 分拣零件的部分程序
按下起动按钮,供料输送带开始运行,当零件到达传送带末端的中转站,中转站记录零件信息,PLC从中转站中获取零件信息,并发送指令给机器人进行零件的分拣任务。
利用比较指令获取机器人的状态,当机器人处于空闲状态,比较结果为真,触点闭合,并判断零件的种类,并将每种零件信息进行传送,使传送带继续自动传送零件。按下停止按钮,机器人执行完当前分拣动作后停止,不再进行零件的分拣。
3 系统运行调试
对人工分拣线在调试过程中应建立虚拟仿真软件VisualOne与PLC的通信连接,完成PLC与虚拟设备之间的逻辑功能的测试。
3.1 虚拟PLC设置
利用PLCSIM Advanced V2.0 SP1 高级仿真软件作为虚拟PLC,分别对高级仿真软件与VisualOne的虚拟仿真设备进行设置,实现两者之间的数据交换,进行动态仿真监控[10]。具体操作过程:打开博途V15.1软件,添加虚拟PLC,完成虚拟PLC的组态,设置PLC以太网的地址,需要与PLC高级仿真器中的地址相同,即博途软件与西门子PLCSIM Advanced V2.0 SP1高级仿真软件中的IP地址设置为一致,这样才能将编译正确的梯形图程序下载到虚拟的PLC中。
3.2 虚拟调试验证
3.2.1 PLC程序调试
打开博途V15.1软件,选中OPC UA,激活OPC UA服务器;在运行系统许可证下设置OPC UA运行许可证,并在所建立项目中的属性设置中设置该项目支持仿真;对PG/PC接口使用西门子PLC高级仿真器的虚拟地址,连接服务器地址设置为OPC UA通讯地址,服务器地址如图6所示,这时便可将编写好的程序进行下载。
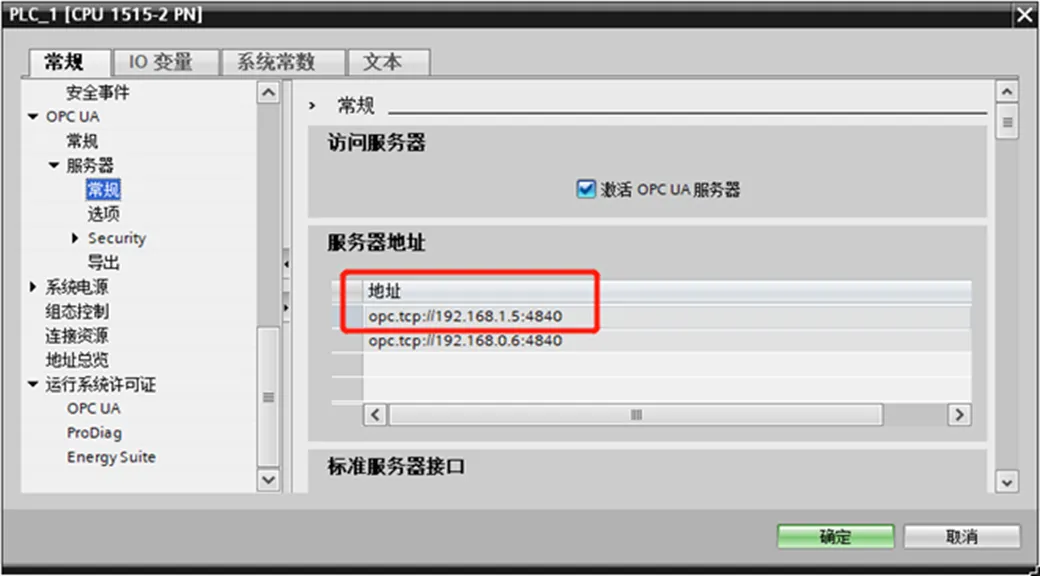
图6 服务器地址
3.2.2 运行调试
在虚拟环境下,首先启用连通性建立仿真软件与PLC通讯连接,接着在连通配置下添加OPC UA服务器,输入服务器地址,实现虚拟仿真对象与PLC之间的数据交互。在VisualOne虚拟仿真软件运行环境下进行仿真,在显示连接成功状态下进行模拟运行,按下虚拟场景的起动按钮,人工分拣线即可开始有序工作,验证控制程序功能的同时还可在“已连接变量”面板中直观地观察到仿真过程中所设置变量的变化情况。调试过程如图7所示。

图7 调试过程
4 结束语
VisualOne虚拟仿真软件提供了在三维场景下实现了PLC验证功能,从而解决PLC难于支持多特性设备的综合性、设计性和创新性的问题,为PLC在教学验证方面提供了发展空间。本文是基于PLC与虚拟仿真技术,设计以人工分拣线为例的PLC虚拟仿真系统,从搭建3D虚拟现实场景开始,完成PLC的I/O分配、程序编写、虚拟PLC的设置、通信连接等一系列的操作,将硬件虚拟在软件仿真方面提供了有力支撑。不仅控制对象不受设备类型限制,而且较为逼真地、立体化展示了工作场景,把具体问题进行可视化,完善了PLC教学实践设计内容。通过PLC高级仿真软件的“牵线搭桥”构建PLC虚拟仿真控制系统,实现对虚拟场景设备执行环节的控制,为虚拟仿真实训项目的开发另辟新径,从而进一步拓宽了学生学习的广度,提升递进式思维能力,为学生提供一个自主探究与创新的学习平台。
[1]游庆华,张婕. 基于S7-300PLC虚拟仿真平台的设计[J]. 2020(10): 98-104.
[2]韩锐. 虚拟仿真系统在PLC课程教学中的应用[J]. 职业,2018(10): 118-119.
[3]王敬冲,王大虎,刘海洋. 虚拟仿真在PLC配料控制系统教学中的应用[J]. 实验室研究与探索,2015(9): 75-78.
[4]贺玮. SAIDE VisualOne 智能工厂仿真基础教程[M]. 吉林: 吉林大学出版社,2018.
[5]赵永信,黎玲萍. 基于PLCSIM Adv的MCD气动手抓与虚拟PLC通信仿真研究[J]. 装备制造技术,2020(12): 56-58,62.
[6]李继芳,许英杰,鲍平,等. 虚拟仿真被控对象在PLC实践教学中的应用研究[J]. 实验技术与管理,2017(34): 114-118.
[7]石秀玲,付铖. 基于OPC技术的PLC全虚拟仿真系统设计[J]. 工业控制计算机,2019(3): 53-54.
[8]梁亮,程丽丽,张珠玲,等. 基于虚拟仿真模型的PLC实训平台[J]. 吉林大学学报(信息科学版),2021,39(4): 397-402.
[9]张强. 基于S7-1200的自动化生产线分拣控制系统设计[J]. 机械工程与自动化,2021(8): 147-148,152.
[10] 尹秉奎,田增愿,龙卫仁. 基于VisualOne的数字化生产线的搭建与仿真[J]. 计算机与信息技术,2021(6): 70-72.
Design of Direct Connect PLC Virtual Simulation System Based on VisualOne
In order to improve the teaching effect of PLC, this paper uses the virtual simulation software to design and debug the PLC project, takes the virtual equipment constituting the three-dimensional scene as the control object, realizes the data exchange between the virtual simulation equipment and PLC through PLC programming, robot programming and communication connection, and uses the PLC advanced simulation software, which can intuitively show the real-time operation process of the automatic control system of the industrial production line under the three-dimensional scene. It can not only reflect the physical performance consistent with the actual production line, but also realize the parallel design of mechanical structure action and PLC, which provides a broader development space for PLC practical teaching.
virtual simulation; data exchange; production line; concurrent design
TP391.9
A
1008-1151(2022)05-0001-04
2022-03-23
陕西省教育科学“十三五”规划2020年度课题(SGH20Y1650)。
任晓敏(1977-),女,陕西乾县人,西安航空职业技术学院副教授,研究方向为电气工程及自动化控制。
