改进型神经网络在雷达误差补偿中的应用
2022-07-15施裕升王晓科杨革文高方君
施裕升, 王晓科, 刘 鑫, 杨革文, 高方君
(1.上海机电工程研究所,上海 201000; 2.上海航天技术研究院,上海 201000)
0 引言
雷达精度是衡量雷达探测的重要战术指标之一[1-2]。近年来,随着雷达隐身技术的持续发展和低空突防技术的实战应用,低空小目标在防空领域带来的威胁与日俱增。由于此类目标具有飞行高度低、自身散射面积较小等特点,防空雷达对其探测精度严重下降。在此严峻形势下,传统雷达误差补偿方法的劣势逐渐突出。因此,对自适应能力强、适用范围广、补偿效果好的雷达误差补偿技术进行研究已然成为未来提高雷达探测精度的重点方向之一。
当前,国内学者围绕雷达精度主要开展了两方面的研究。一是建立几何模型补偿误差。例如:文献[3]建立了制导雷达误差模型估计雷达误差;文献[4]建立了舰船的姿态测量误差模型分析雷达探测精度。但几何模型需要特定的场景才有效,环境适应性差。二是结合ADS-B估计系统误差。例如:文献[5]采用ADS-B将雷达误差分段求平均值;文献[6]等采用最小二乘(LS)法结合ADS-B估计雷达的系统误差。但没有考虑到随机误差对补偿方法的影响,对于超低空目标或者机动目标,该补偿方法的适用性差。
随着人工智能技术的发展,神经网络因具有自适应学习能力、较强的环境适应性、优越的非线性能力,在复杂环境中处理非线性问题的优势显著。因此,为了提高雷达误差补偿方法的适应性与适用性,本文采用BP神经网络用于雷达误差的估计与补偿。但BP神经网络的初始权值和阈值是随机值,导致训练的时间长;此外,训练时易陷入局部最优[7],导致BP神经网络的估计精度低。因此,本文采用改进粒子群(PSO)算法寻找BP网络的最优初始权值和阈值,凭借改进粒子群算法的全局寻优能力解决BP神经网络的缺陷。
首先,引入收敛因子,约束粒子速度,避免粒子陷入局部最优;其次,基于目标函数动态自适应调节惯性权重,陷入局部最优时,可以及时跳出,缩短收敛时间;最后,将改进的粒子群算法用于优化BP神经网络的初始权值和阈值,能够更精确地估计雷达误差,并对雷达的量测值进行补偿,提高雷达精度。
1 基于改进型神经网络的雷达误差补偿
1.1 BP神经网络原理
BP神经网络的组成结构为输入层、若干隐含层和输出层。如图1所示,以3个输入层、3个隐含层、1个输出层为例进行说明。
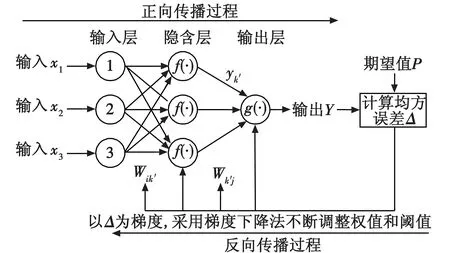
图1 BP神经网络训练流程图Fig.1 Training flow chart of BP neural network
在正向传播过程中,第k′个隐含层节点的输出yk和输出层的输出Y分别为
(1)
(2)
式中:i为输入层节点数;k′为隐含层节点数;j为输出层节点数;xi为第i个输入层节点的输入;Wi k′为第i个输入层节点连接第k′个隐含层节点的权值;Wk′ j为第k′个隐含层节点连接第j个输出层节点的权值;f(·)和g(·)为非线性激励函数。
在反向传播过程中,以期望值和输出值间的均方误差为梯度,采用梯度下降法不断反向寻找权值和阈值的最优值,使实际输出Y值逐渐收敛于期望值P[8]。BP神经网络通过权值与阈值的不断修正实现对样本的训练,当训练完成后,网络参数会保持不变。
1.2 基于BP神经网络的雷达误差估计
由于BP神经网络的输入与输出存在某种关系,因此,采用BP神经网络估计雷达误差的前提是了解误差的影响因素。经查阅文献和分析得知:距离误差影响因素为目标高度和目标速度[9]。其中:目标高度由目标距离和目标俯仰角确定;方位角误差影响因素为目标高度、目标速度和方位角[9-10];俯仰角误差影响因素为目标高度和目标速度[9]。
将误差影响因素作为BP神经网络的训练输入,将雷达测量值与真值的误差作为训练输出,反复训练BP神经网络使权值与阈值趋于稳定。按照此方案训练出3种估计网络,分别为距离、方位角和俯仰角误差的估计网络,其结构分别如图2~4所示。

图2 基于BP神经网络的距离误差估计Fig.2 Distance error estimation based on BP neural network
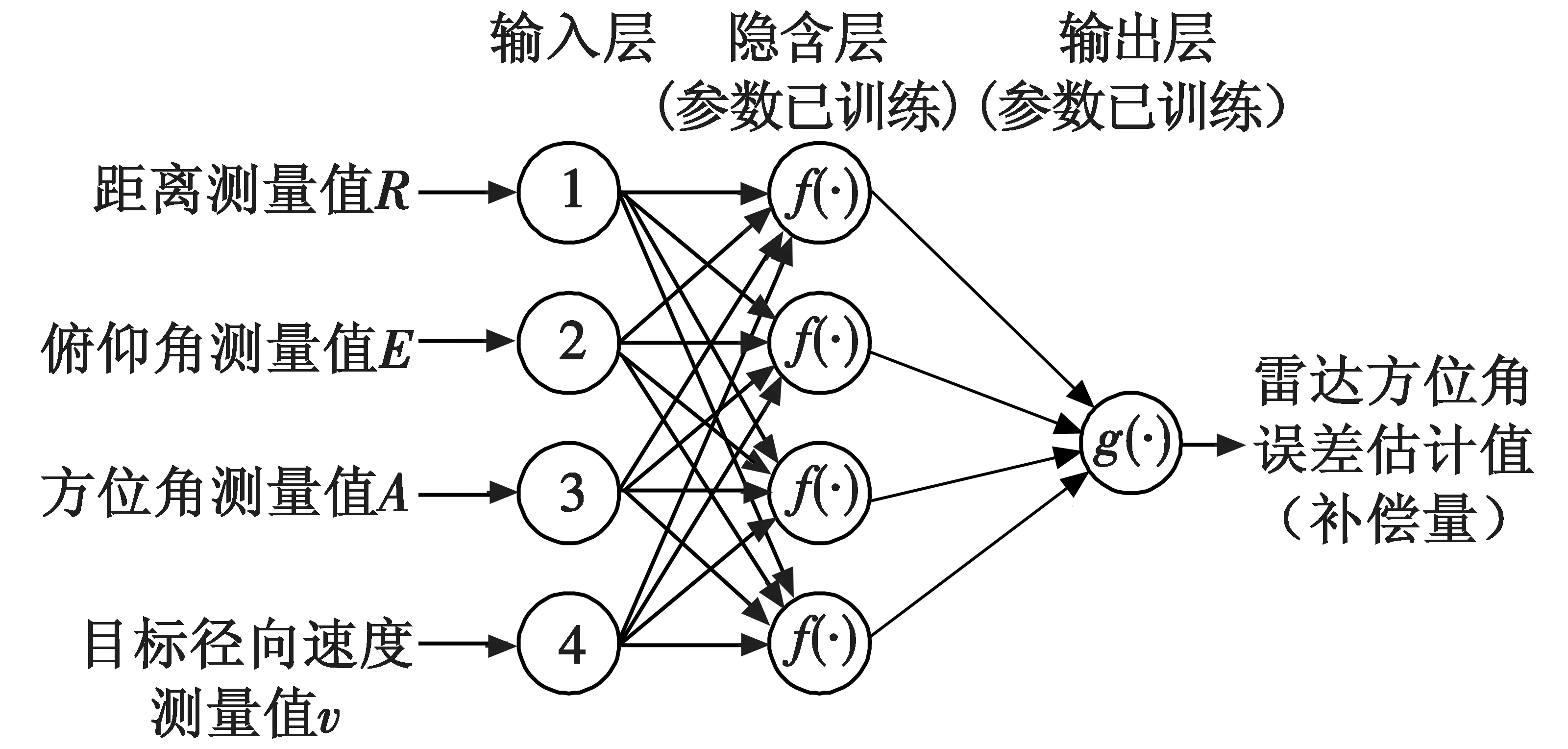
图3 基于BP神经网络的方位角误差估计Fig.3 Azimuth error estimation based on BP neural network

图4 基于BP神经网络的俯仰角误差估计Fig.4 Pitch error estimation based on BP neural network
1.3 粒子群算法的改进
BP神经网络的初始权值和阈值是随机值,会导致上文中提到的梯度下降法易陷入局部最优,因此,本文在传统粒子群算法的基础上引入自适应惯性权重和收敛因子提高粒子群算法的全局寻优能力,优化BP神经网络的初始权值和阈值。
传统的粒子群算法是在解的空间内初始化一群随机粒子,通过不断地迭代更新粒子速度和位置计算目标函数的全局最优值[11](适应度)。粒子速度、位置的第k+1次迭代算式分别为
Vk+1=wVk+c1γ1(Pk-Xk)+c2γ2(Gk-Xk)
(3)
Xk+1=Xk+Vk+1
(4)
式中:w为惯性权重;c1,c2为加速度常数;γ1,γ2为两个随机数;Pk,Gk分别为迭代次数为k时的个体极值和群体极值。
在BP神经网络中,粒子位置表示BP神经网络的初始权值和阈值的取值,粒子速度表示初始权值和阈值的变化量,待优化的目标函数即BP神经网络中均方误差的算式为
(5)
式中:n为训练样本数;on为当前权值和阈值下神经网络对第n个样本输出的估计值;pn为第n个样本的期望值。
传统粒子群算法的粒子速度在式(4)中没有被约束,容易陷入局部最优。此外,式(3)中惯性权重为定值,而惯性权值决定着粒子的搜索能力,因此无法自适应调节全局搜索和局部搜索,导致收敛速度慢[12]。故本文引入收敛因子和自适应惯性权重调节改进粒子群算法。
为了避免陷入局部最优点,本文在式(4)的基础上进行改进,引入收敛因子λ,改进后的算式为
Xk+1=Xk+λVk+1
(6)

(7)
若陷入局部最优,为了让粒子群算法在局部最优中尽快跳出,提高收敛速度,缩短迭代时间,采用一种基于目标函数的动态自适应惯性权重,即
(8)
w=exp(-δ(k)/δ(k-1))
(9)
式中:k为当前迭代次数;δ(k)为衡量惯性权重变化的平滑程度;fgbest(PSi(k))为第i个粒子在第k次更新位置时对应的个体极值适应度值;fzbest(PSi(k))为第i个粒子在第k次更新位置时对应的最优粒子对应的极值适应度值;w为惯性权重。
该算法在每次迭代中都会计算个体极值和群体极值之间的差异,即平滑程度。若相邻两次迭代的平滑程度差异很大,说明此时可能陷入局部最优,应尽量增大惯性权重,从而扩大粒子搜索范围。因此,相比传统算法能够及时跳出局部最优。
1.4 基于改进型BP神经网络的雷达误差补偿方法
本文采用改进粒子群算法优化BP神经网络,解决BP神经网络易陷入局部最优及训练时间长的问题,并将改进型BP神经网络应用于雷达的误差补偿。基于改进型BP神经网络的雷达误差补偿流程如图5所示。

图5 雷达误差补偿流程图Fig.5 Flow chart of radar error compensation
具体算法流程如下:
1) 确定雷达距离、方位角、俯仰角的误差影响因素,作为神经网络的输入;
2) 初始化神经网络的拓扑结构;
3) 采用本文提出的算法改进粒子群算法;
4) 采用改进PSO算法迭代寻找BP神经网络的最优初始权值和阈值;
5) 训练雷达的先验探测数据,学习雷达的误差特性,训练结束后神经网络内部的权值参数会固定;
6) 基于改进型BP神经网络估计距离、方位角、俯仰角各自对应的误差值;
7) 将误差的估计值与雷达量测值相加,输出处理后的量测数据。
2 仿真分析
选取某雷达的实测数据作为样本,其中包含超低空目标的量测数据。对所有的样本数据进行归一化处理,并随机抽取100个样本数据用于神经网络的性能测试,余下的样本数据用于神经网络的训练;将训练好的神经网络用于距离、方位角和俯仰角的误差估计与补偿。因保密原因,本文中误差指标以a,b,c量化处理。
2.1 距离误差补偿
将距离误差补偿前后的绝对值进行比较,结果如图6所示。从精度上看,未补偿的误差平均值为3.1a,而补偿后的误差平均值为0.38a,精度提高了87.7%;从起伏性看,未补偿的误差标准差为1.592a,而补偿后的误差标准差为0.26a,误差波动稳定性提高了83.67%。
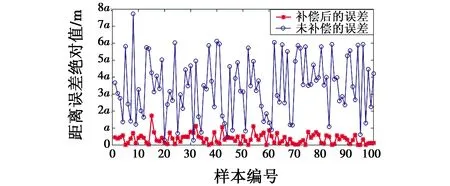
图6 距离误差补偿前后的绝对值对比图Fig.6 Comparison of absolute values before and after distance error compensation
2.2 方位角误差补偿
将方位角误差补偿前后的绝对值进行比较,结果如图7所示。从精度上看,未补偿的误差平均值为1.65b,而补偿后的误差平均值为0.18b,精度提高了89.09%;从起伏性看,未补偿的误差标准差为b,而补偿后的误差标准差为0.183b,误差波动稳定性提高了81.7%。

图7 方位角误差补偿前后的绝对值对比图Fig.7 Comparison of absolute value before and after azimuth error compensation
2.3 俯仰角误差补偿
将俯仰角误差补偿前后的绝对值进行比较,结果如图8所示。从精度上看,未补偿的误差平均值为1.44c,而补偿后的误差平均值为0.11c,精度提高了92.36%;从起伏性看,未补偿的误差标准差为0.8c,而补偿后的误差标准差为0.1c,误差波动稳定性提高了87.5%。

图8 俯仰角误差补偿前后的绝对值对比图Fig.8 Comparison of absolute value before and after pitch error compensation
2.4 对比分析
选取与上述相同的100个样本数据,采用文献[6]中的最小二乘(LS)法线性估计雷达的距离、方位角和俯仰角误差,并与PSO-BP神经网络进行对比,另外,将未优化的BP神经网络与PSO-BP神经网络进行对比,对比标准为估计值与雷达真实误差的均方根误差,即
(10)
式中:Δr为雷达的真实误差值;Δp为雷达的误差估计值。
各算法的误差估计效果对比结果如表1所示。
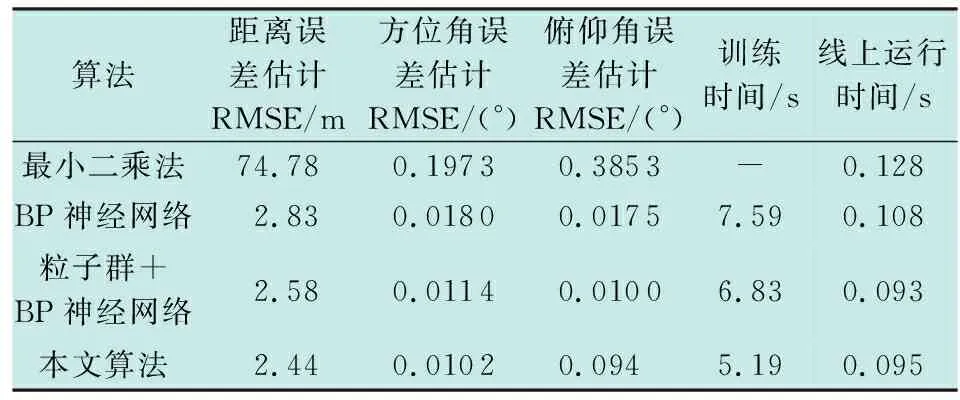
表1 各算法的误差估计效果对比Table 1 Comparison of error estimation effects of various algorithms
从表1中可以看出,线性最小二乘估计性能较差,说明线性估计不是解决雷达误差估计的理想方案。相比而言采用BP神经网络进行非线性估计后,估计精度明显提升。相比传统粒子群算法优化的BP神经网络,本文算法进一步提升了距离、方位角和俯仰角的估计精度,并缩短了线下训练时间,表明本文算法是合理、有效的。此外,本文算法的线上运行时间略优于传统误差补偿算法,具有工程应用前景。
3 结论
本文将改进PSO算法与BP神经网络相结合,缩短了训练时间,提高了传统BP神经网络的估计精度,并将该神经网络应用于雷达的误差补偿。采用雷达的实测数据进行了仿真验证,结果表明,补偿后的距离、方位角、俯仰角的精度以及误差起伏性均有大幅改善,与传统的误差补偿方法相比补偿效果更好,工程应用性和推广应用性更强,更适应未来防空作战环境。
