结合邻域信息自适应优化的SAR图像变化检测
2022-07-15朱拂晓董张玉杨学志
朱拂晓,董张玉,3,杨学志
(1合肥工业大学 计算机与信息学院,合肥 230031;2工业安全与应急技术安徽省重点实验室,合肥 230031;3智能互联系统安徽省实验室,合肥 230031;4合肥工业大学 软件学院,合肥 230031)
0 引 言
合成孔径雷达(Synthetic Aperture Radar,SAR)因其具有全天时、全天候、高分辨的特征,并且不受日照、雾霾、云层等气象影响,广泛应用在环境监测、农林监测、自然灾害评估等领域,SAR图像变化检测是其中非常关键的环节。
然而SAR图像变化检测技术受到其相干斑噪声影响大,如果在进行变化检测时,相干斑噪声的影响不能被消除,则不能很好地区分图像中的变化区域以及不变区域,影响最终的分类精度。因此,需要一种既能有效抑制相干斑噪声,又能很好保留细节信息部分的SAR图像变化检测算法。
对于两幅配准后不同时间的两幅SAR图像,可以用变化检测技术将图像分为两个区域,即变化区域和不变区域。SAR图像变化检测技术通过特定算法,生成对应的变化差异图像,再通过聚类的方法对差异图像分进行二分类。因此,要提高SAR变化检测精度,需要改进差异图生成算法,同时也要对聚类算法进行优化。
近年来,关于SAR变化检测,提出了许多差异图生成算法,采用多种方法提高算法抗噪性,Liu等人提出了基于邻域比值的SAR图像检测算法,通过计算邻域像素的比值,构建差异矩阵,对矩阵进行更迭,实现变化检测;Gong等人在邻域比差异图上进行改良,融入对数算子,生成邻域对数比差异图,降低了相干斑噪声对检测结果的影响;Milad等人提出了一种显著性引导邻域比模型,将显著性引导和邻域比两种方法生成一个向量作为特征,利用K-means方法进行聚类。也有学者通过改进差异图分类方法,从而提升变化检测精度;Yin等人通过改进模糊C均值(Fuzzy C-Means,FCM)算法,提出了直觉FCM聚类算法;Jia等人基于多核学习在信息融合中的有效性和灵活性,提出了核图割算法,用于融合减法图像和比值图像之间的互补信息。以上算法虽然具有较强的抗噪能力,但是对于图像复杂区域处理能力不足,没有平衡好空间信息和细节信息之间的关系。
为了降低相干斑噪声影响,提高SAR图像变化检测精度,本文提出了一种结合邻域信息自适应优化的SAR图像变化检测算法,在异质区域使用较大的邻域窗口,在同质区域使用较小的邻域窗口,根据邻域信息自适应调整窗口大小,以此在降低噪声影响的同时保留图像的细节信息。实验验证了该算法有较强的抗噪能力,实验结果与实际变化参考图相似度高,变化检测结果理想。
1 算法框架
本文提出了一种结合邻域信息自适应优化的SAR图像变化检测算法,该方法首先针对两幅同一地区、不同时间的SAR图像的不同像素点,根据像素点邻域异质性构造不同大小的邻域窗口,进而利用对数均值比方法构造差异图像,之后将其与差值差异图像进行加权融合,再对融合后差异图像应用基于邻域隶属度约束的FCM聚类方法得到最终的变化检测结果。本文方法总体框图如图1所示。

图1 本文方法总体框图Fig.1 The overall block diagram of the proposed method
2 算法原理
2.1 差异图构造
假设图像和是同一地区、不同时间的两幅SAR灰度图像,图像大小为,(,)和(,)分别对应的两幅SAR图像上第行、第列像素的灰度值,其中,1≤≤,1≤≤。
根据邻域信息的异质性确定每个像素点的自适应窗口大小,由此构造自适应均值比差异图像。
与均值比法不同,自适应均值比法利用邻域信息异质性∂维持抑制噪声和保留细节信息之间的平衡,式(1):

其中,()表示邻域方差,()表示邻域均值。
∂()值越大表示像素点的邻域结构越复杂,其异质性也越强,越需要保留其细节信息;相反,∂()值越小表示像素点处均质性越强,更加注重噪声信号的抑制。根据邻域异质性确定邻域窗口大小流程:
(1)设置最小窗口和最大窗口,异质性阈值∂,若某个窗口∂()值小于∂,则视为同质窗口;
(2)设置当前窗口();
(3)计算像素点在当前窗口下邻域异质性∂(),若∂()∂,跳转至步骤(5);否则跳转至步骤(4);
(4)若,跳转至步骤(5);否则,=2,跳转至步骤(3);
(5)保存当前像素点最优窗口(),如果不是最后一个像素点,则移动到下一个像素点,从步骤(2)继续;否则流程结束。
根据最优窗口构造出自适应对数均值比差异图,式(2)

其中,和分别表示和在对应最优窗口下的均值。
自适应对数均值比差异图通过上述步骤计算生成,其不仅拥有传统均值比差异图消除相干斑噪声的特性,同时可以更好地保留图像细节部分。
另外,根据两幅SAR图像、相同位置上像素点灰度值的差值生成差值差异图像D,式(3):

其中,()表示()在处的灰度值,()表示在处的灰度值。
差值差异图可以有效地找到两幅SAR图像的弱变化区域。
2.2 差异图融合
对两幅差异图像按照特定方法进行融合,可以很好地将两种方法各自的优势结合。
对两种差异图和D进行归一化处理,公式(4)和公式(5):

通过归一化将两幅差异图映射到0~1的区间内,并对其进行加权求和,得到最终的差异图D,公式(6):

2.3 基于邻域隶属度约束的FCM聚类
模糊C均值聚类算法是利用隶属度确定每个数据点属于某个聚类程度的一种聚类算法,其在图像分类上也具有不错的效果。
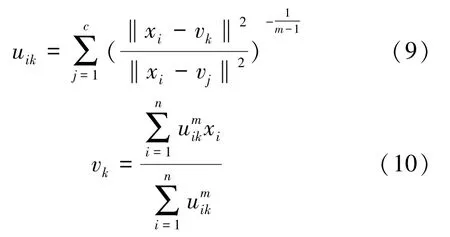
设{,,…,x}表示图像中的像素点,将这个样本分成个聚类,{,,…,v}表示个聚类中心。FCM目标函数,公式(7):

其中,表示模糊加权指数,一般取2;d表示样本与聚类中心的欧式距离,即d=‖xv‖;u表示第个像素与第个聚类中心的隶属度,满足式(8):

根据拉格朗日乘数法,对式(7)中u,v求导,得到式(9)和式(10):
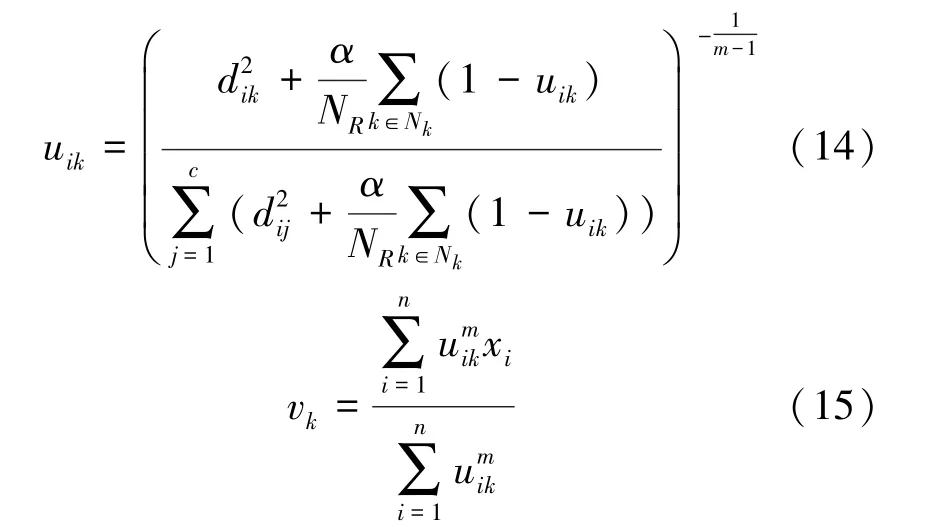
而传统的FCM聚类算法仅仅针对每个像素点进行分类,没有考虑到空间信息,容易受到噪声干扰,导致分类结果精度不足。基于邻域隶属度约束的FCM算法修改了传统的目标函数,并引入相应的惩罚机制,增强了邻域像素的影响因子,从而提高检测精度,式(11)。

其中,表示像素的邻域大小,N表示像素所处的邻域。
为正则化系数,对邻域信息所占权重有影响。的选取方法:首先,使用不考虑邻域信息的FCM算法,得到聚类矩阵以及目标函数,据此得到对应函数值,式(12):

得出正则化系数,式(13):

约束条件不变,根据拉格朗日乘数法对式(11)中的u,v求导,得到式(14)和式(15):
算法流程如下:
(1)确定聚类中心数目,加权指数以及阈值;
(2)使用FCM算法,得到初步的聚类矩阵和聚类中心,通过式(13)得到的值,设置迭代次数0;
(3)利用式(14),式(15)更新矩阵及;
(4)若‖‖,则结束算法;否则,设置1,跳转至步骤(3)。
3 实 验
3.1 实验数据集及评价指标
实验采用两组同一地区不同时间的SAR图像检测算法性能。第一组是由Radarstat遥感卫星获取的加拿大Ottawa地区1997年6月和1997年8月的SAR图像,该数据集大小为290×350,及实际的变化参考图,如图2所示。

图2 Ottawa地区数据集Fig.2 Ottawa area data set
第二组是由ERS-2遥感卫星获取的瑞士首都Bern地区于1994年4月和1994年5月的SAR图像,该数据集大小为301×301,及实际变化参考图,如图3所示。
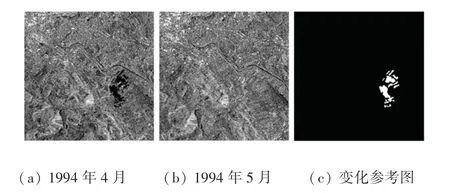
图3 Bern地区数据集Fig.3 Bern area data set
研究人员通常采用图像分类精度的评价方法对变化检测结果进行评定,具体为虚警数、漏检数、正确分类精度、Kappa系数等:
(1)虚警数(False Positive,):未变化区域被检测为变化区域的像素数;
(2)漏检数(False Negative,):变化区域被检测为未变化区域的像素数;
(3)正确分类精度(Percentage Correct Classification,):正确分类像素占图像总像素的比例;
(4)系数:用于衡量变化检测精度的重要指标,计算公式(16):

其中:

以上4种评价指标中,系数表示变化检测结果与真实的变化参考图之间的相似程度,系数越大,表示变化检测效果越好,因此,可以将系数作为衡量变化检测算法优劣的最重要指标。
3.2 实验结果及分析
为了验证本文算法准确性,设置MR方法、MRF方法、PCA-K方法、FLICM方法与本文算法作比较。Ottawa地区以上4种方法变化检测结果图、本文算法结果图以及标准参考图如图4所示。其中,MR方法变化检测结果中存在大量斑点噪声,说明该方法对于噪声较为敏感,无法起到抗噪的效果;MRF方法的变化检测图中噪声数量比MR方法稍微少一些,但同样令人不太满意;PCA-K方法的变化检测结果图明显抑制了噪声信号对检测结果的影响,但是在边缘轮廓部分检测效果不理想,检测结果过于平滑;而FLICM方法无论是噪声部分,还是边缘轮廓检测部分,相较于前面3种方法表现都更为优秀,但是其细节部分仍然存在一些瑕疵;本文提出的算法变化检测,其噪声斑点像素数量明显少于前几种方法,细节部分也更加接近标准变化检测图。
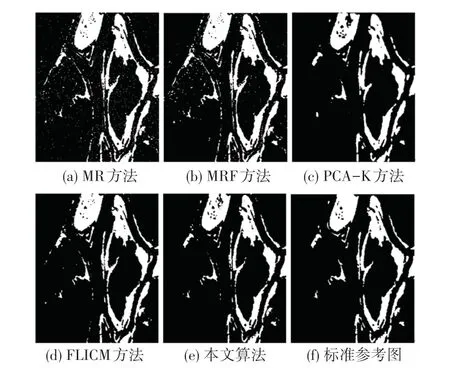
图4 Ottawa地区变化检测图Fig.4 Change detection map of Ottawa area
Ottawa地区的变化检测结果分析见表1,可以看出本文算法与MR方法得出的变化检测结果相比,增加了721个像素,减少了2 250个像素,准确率增加了1.51%,增加了5.01%;与MRF方法相比,增加了822个像素点,减少了2 389个像素点,准确率增加了1.54%,增加了5.09%;与PCA-K方法相比,减少了465个像素点,减少了733个像素点,准确率增加了1.18%,增加了4.46%;与FLICM方法相比,增加了626个像素点,减少了941个像素点,准确率增加了0.31%,增加了1.35%。通过与其他4组实验的比较,本文提出的算法检测结果是最好的,准确率和都高于另外4种方法。

表1 Ottawa地区检测结果分析表Tab.1 Analysis table of Ottawa test results
Bern地区4种方法变化检测结果图、本文算法结果图以及标准参考图如图5所示,可见与Ottawa地区变化检测图相同,MR方法和MRF方法的变化检测图都存在不同程度的不均匀斑点噪声,说明这两种方法抗噪能力较弱;PCA-K方法虽然抑制了大量噪声信号,但是在变化检测细节部分明显精度不足,标准参考图中变化主体部分由若干个变化区域组成,而在PCA-K方法生成的变化检测图中,变化区域连通为一个整体;FLICM方法虽然在细节部分检测精度较高,但是仍受到噪声信号影响;本文提出的算法生成的变化检测结果不仅在检测细节上表现优于上述4种算法,且只存在一个像素的白色斑点,说明其具有良好的抗噪能力。

图5 Bern地区变化检测图Fig.5 Change detection map of Bern area
Bern地区的变化检测结果分析见表2,可以看出,本文算法与MR方法得出的变化检测结果相比,增加了155个像素,减少了736个像素,准确率增加了0.64%,增加了15.90%;与MRF方法相比,增加了53个像素点,减少了99个像素点,准确率增加了0.05%,增加了2.03%;与PCA-K方法相比,增加了107个像素点,减少了156个像素点,准确率增加了0.05%,增加了1.43%;与FLICM方法相比,增加了178个像素点,减少了288个像素点,准确率增加了0.12%,增加了2.99%。通过与其他4组实验的比较,本文提出的算法检测结果是最好的,准确率和均高于另外4种方法。

表2 Bern地区检测结果分析表Tab.2 Analysis table of Bern test results
参数是自适应均值对数比差异图与差值差异图加权融合的重要参数,数值越小,表示自适应均值比差异图对变化检测结果影响越大,差值差异图对结果影响越小,反之数值越大,表示自适应均值比差异图对变化检测结果影响越小,差值差异图对结果影响越大。
参数对PCC的影响如图6所示,对的影响如图7所示。可以看出,对于两个地区变化检测结果,随着的数值由0逐步增大,直至升至0.2时,Ottawa和Bern地区的和都在不断增大,达到最大值。继续增大数值后,两幅图像的和系数都在下降。由此可见,当取0.2时,变化检测效果最佳。

图6 参数α对PCC的影响Fig.6 Impact of parametersαon PCC

图7 参数α对Kappa的影响Fig.7 Impact of parametersαon Kappa
4 结束语
针对两幅同一地区、不同时间的SAR图像变化检测问题,本文提出了一种基于邻域信息优化以及差异图融合的方法,该方法根据像素点邻域的异质性∂,自适应地提取邻域信息,极大程度降低了噪声对变化检测结果的影响,同时生成的差值差异图像可以很好地找到弱变化区域,将两幅差异图结合,便可以实现抑制噪声和保留细节之间的平衡。实验结果证明了本文提出的方法在SAR图像变化检测上的有效性,通过与其他变化检测方法对比,本文算法在和系数上均优于其他算法,能够更加准确地获取变化信息,有效提高了SAR图像变化检测精度。下一步将针对SAR图像边界区域思考,构造更加适合边界部分的邻域窗口,以减小图像局部区域信息损失,进一步提高变化检测精度。
