高速机动目标运动参数非接触测量方法研究
2022-07-14张亚葛任晓斌贺晓晶
张亚葛,任晓斌,贺晓晶
(西安中飞航空测试技术发展有限公司,陕西 西安 710089)
0 引言
随着社会经济的高速发展,军、民用飞机的需求都在逐渐增长。飞机起落架在起降过程中承受较大的负载,关系到飞机的起降及飞行安全,因此飞机的定型试飞需要测试起落架强度是否满足设计要求,测量飞机在着陆时刻段的运动参数,如着陆轨迹、飞机速度及加速度等参数。通过对运动参数的分析、计算,获得起落架在着陆过程中的受力变化,为试飞定型提供依据。本文采用数字高速摄影测量系统获取飞机运动视频,分析解算其运动参数,为飞机设计定型提供数据依据。
1 测量系统设计
测量系统包括高速摄像机、时码同步模块、参数解算计算机以及视频处理软件。高速摄像机平行架设在机场跑道外侧,使测量时间与机载系统时间一致,保证数据处理的准确度[1]。该测试系统的组成如图1 所示。
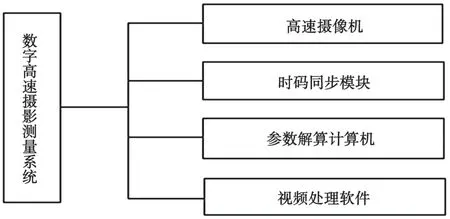
图1 数字高速摄影测量系统组成框图
其中,高速摄影机用于拍摄飞机着陆的视频数据,时码同步模块用于提供时统,参数解算计算机作为视频处理软件的安装平台,视频处理软件可实现数据分析、参数解算、结果输出等功能。
系统充分考虑高速摄像机的光学成像特性,在平行跑道300 m 区域内布置多个测量点,用多台高速摄像机覆盖飞机着陆区域;在飞机机身粘贴测量标志,用于视频数据的判读。
2 测量原理
2.1 测量方法分析
本测量方案中,对高速影像的处理主要利用摄影测量的原理进行解算,其中多站交会、单站解算能够得到较高的测量精度,但需要在待测目标周围布设控制场,适用于目标相对较小、摄影距离较近的高速运动目标的测量。对于测量着陆段飞机的运动参数及姿态,为保证飞行安全,根据要求,摄像机与跑道必须控制在一定距离范围内进行测量。如果增加摄像机镜头焦距,则测量视场范围将变小,飞行员不易掌握飞机落点位置,很难保证着陆点进入测量视场中。并且,如果采用布设控制场的测量方法,需要在跑道上建立极高的控制点才能保证解算精度,但这样很难实现。
因此,在飞机着陆时刻段,主要在跑道中心线附近采用多台摄像机平行布站组合拍摄方式,将测量区域扩展到300 m,可以覆盖控制着陆点位置,避免出现无法拍摄到关键段数据的情况。同时,为了保证测量精度和计算方便,采用正直摄影的方式架设摄像机进行测量。
2.2 系统标定方法
测量中需要获取摄像机畸变误差。由于物距是焦距的几倍甚至几十倍,导致摄像机像点位置的畸变误差在测量结果中会被放大多倍。因此,需要对测量系统进行内外参数的标定。
摄像机主要标定的数据包括:
(1)摄像机内参,主要有焦距f,光心坐标(x0,y0),像素倾斜角alpha_c;
(2)摄像机外参,主要有旋转矩阵R={ai,bi,ci}i=1,2,3,平移矩阵T(Xs,Ys,Zs);
(3)摄像机镜头畸变系数,主要包括径向畸变(K1,K2)、偏心畸变(P1,P2)等。
为保证测量精度,设计针对本测量方案的摄像机地面测量平台和测量校准标,其标定方法为:在摄像机前方架设二维网格检校板,将摄像机焦距调到无穷远,利用全站仪队检校板上的特征点进行测量,获得像机检校的绝对坐标值,同时利用摄像机拍摄4 张以上不同角度放置的检校板图像,利用相机检校软件对摄像机进行检校,可以获得摄像机的内外方位元素,根据检校参数对摄像机图像进行图像重建。
2.3 标定原理
2.3.1 内外方位元素结算
本测量方案采用二维直接线形变换(Direct Linear Transformation,DLT)求解摄影机内外方位元素。二维直接线性变换表达式为:

式中:H=(h1,h2,h3,h4,h5,h6,h7,h8)T为DLT 算法的变换参数,X,Y为平面参数控制点的空间坐标。此时假设Z坐标为零,(x,y)为像空间坐标。根据摄影测量共线条件方程可知:

式中:x0,y0,f为相机的内方位元素,(XS,YS,ZS)为测量摄像机坐标,(X,Y,Z)为对应的物空间坐标,(x,y)为像空间坐标,R={ai,bi,ci}i=1,2,3 为旋转角φ,ω,κ,的旋转矩阵。
不考虑镜头畸变影响时,相机的实际未知数为9 个(f,x0,y0,φ,ω,κ,XS,YS,ZS),而二维DLT 共有8 个参数,因而通过拍摄多张二维网格像片进行检校,并通过最小二乘法解超定方程最终得到摄影机的内外方位元素9 个参数(f,x0,y0,φ,ω,κ,XS,YS,ZS)。
2.3.2 相机检校
利用二维DLT 解算出相机的内外方位元素初值后,即可用摄影测量中常用的光束法平差进行相机检校。测量中的光学镜头存在一定的畸变,检校时需求出畸变参数[2]。包含畸参数的共线方程为:

式中:fx,fy分别为x,y两个方向的焦距。

式中:r2=(x-x0)2+(y-y0)2,K1,K2称为径向畸变差,P1,P2称为偏心误差参数。用泰勒级数线性化的方法,求得误差方程式如式(5)所示:

利用最小二乘法求上述误差方程式的解,得到摄像机的径向畸变参数(K1,K2),称为偏心误差参数(P1,P2)。
2.3.3 畸变改正
根据式(1),由物空间平面上的点坐标解算出像空间坐标。计算各控制点在像空间的真值坐标和实测坐标差值,获得控制点在像空间内的总畸变误差(Δxi,Δyi),i=1,2,…,n,由像空间标志点畸变修正数,采用线性内插法建立畸变改正模型完成图像重建。
2.4 参数解算
2.4.1 图像判读
由于高速摄影帧频很高,每一帧图像中标志点位置的变化较小,需要采用高斯滤波法对图像数据进行平滑。用一阶偏导有限差分法计算出梯度的幅值、方向,对梯度幅值完成野值剔除,输出每个标志点的坐标数据。点在图像上的判读数据映射到空间坐标中,得到每个校准标在跑道坐标系中的坐标(Xj,Yj,Zj)(j=1,2,3,4)。
2.4.2 图像中特征点空间坐标的确定
假设图像中心点M在跑道中心线上,对应的跑道坐标系X轴和Y轴坐标为(XM,YM),则图像中任意点P对应的跑道坐标系X轴和Y轴坐标(XP,YP)为:

式中:Δxi,Δyi分别为图像中P点相对于图像中心M´的坐标。
2.4.3 速度求解
根据判读点的位移数据,采用二阶中心平滑法进行二维方向速度的求解:
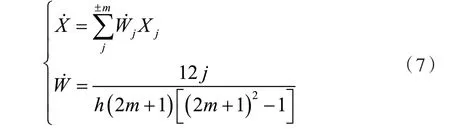
式中:j=0,±1,±2,…,±m为图像序列数,2m+1 为平滑设置量,为平滑权重系数,h为数据采样间隔。
3 测量精度分析
分析高速摄影机测量飞机着陆段的运动参数,主要存在图像判读误差、摄影机校准误差、镜头畸变带来的误差、时间同步误差以及坐标转换误差等,在工程测量中可采用综合误差分析方法进行测量精度估算[3]。在实际的测量环境下,利用其他高精度测量仪器得到的测量结果对比的方法和对主要的测量误差的分析计算的方法共同确定其测量精度[4]。
本测量方案中的误差分析采用比较法完成。在飞机着陆区域设置控制点进行精度检查,控制点坐标采用全站仪(定位精度0.002 m)进行标定[5],对高速摄像机的图像数据进行标志点判读、计算,图像1 个像素表示实际测量点约0.08 m,再对图像中标志点实现亚像素判读获得0.2个像素的判读精度,考虑镜头畸变、解算误差,通过与控制点的数据比对,高速摄像测量系统的定位精度优于0.2 m。
4 结语
本文设计的高速影像测量系统适用于高速机动目标运动参数测量需求,阐述的高速影像测量系统标定方法、相机检校方法、参数解算方法切合工程实际应用需求,系统测量精度能够得到有效控制,为高速机动目标运动参数测量的研究提供了可行性较高的参考。
