基于车载激光点云的城市道路提取方法研究
2022-07-14孙晨辉张君栋
盛 君,孙晨辉,王 杰,张君栋
1. 杭州天图地理信息技术公司,浙江 杭州 310000;
2. 浙江省测绘科学技术研究院,浙江 杭州 310000
0 引 言
高精度、高现势性的道路三维信息对于智能城市建设、交通管理与道路维护具有重要意义。作为一种新的空间三维数据采集手段,移动车载激光扫描技术可在不与被观测物接触的情况下,主动、动态、实时、快速地获取被观测物的三维位置信息与纹理信息,利用移动车载激光扫描技术采集到的高密度、高真实性的点云数据可以为道路三维信息的获取提供数据支撑[1]。
近年来,基于车载激光点的研究主要集中在点云分类、杆状地物提取、道路边界提取及点云滤波等。针对道路的提取,国内外学者也做了大量的研究。方莉娜等[2]对常见道路的路坎特征进行了总结,并且根据点云密度、坡度与高程信息识别道路边界并进行道路点云提取。惠振杨等[3]基于不同地物点云反射强度的差异,提出一种偏度平衡算法对反射强度阈值进行确定,从而实现道路边线的提取。安瑶军等[4]使用布料模拟滤波算法实现地面点提取,并且通过法向量相似度聚类提取道路点。胡啸等[5]通过扫描线滤波与欧式聚类算法对高速公路边界进行提取。
城市道路点云场景受行人、车辆的影响较大,在对道路边界提取前需要将冗余数据及噪声去除,但又要保证数据的准确性,使用传统点云滤波方法进行滤波的效果不是特别理想。本文在对传统点云滤波方法分析的基础上,结合车载点云的特征,提出了一种改进的点云滤波方法。在点云滤波的基础上,根据道路边界的空间分布特征及车载扫描轨迹信息,通过聚类及增加约束条件实现道路边界的准确提取。道路边界信息反映了道路提取的最终成果,准确完整地提取出道路边界线是城市道路边界提取的关键步骤,通过Bezier曲线拟合对提取得到的道路边界点云进行拟合,得到道路边界线信息。
1 车载点云道路提取方法
1.1 数据预处理
车载激光扫描过程中,受环境中悬浮物及多路径效应影响,导致采集得到的原始点云数据中含有噪声点。当前,对于剔除空中离散点效果较为显著的方法有局部离群因子检测方法;对于剔除低于地表的高程异常点效果显著的方法有拟合判断法,该方法通过对激光点及其邻近点进行拟合构面,并计算各点与平面的残差中误差,若该激光点与平面的偏离超过3倍中误差,可认定该点为高程异常点,予以剔除。
1.2 非地面点滤波
目前,对于移动车载激光点云的滤波方法有基于高程的滤波方法、基于坡度的滤波方法、移动窗口滤波方法以及基于不规则三角网滤波方法等[6]。目前,这些滤波方法的主要问题在于,算法的稳定性及适用性不强,地面点提取的准确率有待提高;滤波过程中设置的阈值较为单一,限制条件少,对于地形起伏较大区域的滤波效果较差;在点云滤波过程中,需要大量的人工交互[7]。
本文通过对种子点选取与确定、点云处理范围增加限制条件,提高滤波算法的滤波效果。根据实际场景中点云的情况,对地面点的提取参数及阈值进行设置。改进滤波算法的具体流程为:
1)限制点云处理范围。为了减少点云滤波过程中需要处理的点云数据量,可将地面以上和以下一定范围内的点云选取出来进行滤波处理。
2)点云数据格网化。首先确定点云区域的最大建筑物尺寸S以及平面坐标的取值(xmin、xmax、ymin、ymax),其次计算点云所在格网行数(L)、列数(C)以及点云格网化格网数目。通过S可以确定格网边长,公式如下:

式中,int为取整;(x,y)为激光点坐标;m、n分别为x、y方向格网数。

3)确定种子点。首先确定每个格网内激光点个数N,其次设置激光点个数阈值,若某个格网内激光点个数少于阈值,那么该激格网内所有激光点可视为非地面点,不参与种子点的选取。最后,将参与种子点选取的格网内高程最低点作为种子生长点。
确定种子点后,需要判定他们的可靠性。针对城市道路地面激光点高程差异较小这一特点,通过下式判定格网内初筛种子点O。计算∑H,若∑H小于设置阈值,那么初筛种子点O可认定为地面种子点,若∑H大于阈值,那么种子点高程为H1至H8的平均高程。∑H计算公式如下:

式中,H1至H8为格网相邻的8个格网种子点高程;H0为格网初筛种子点高程。
4)构建初始稀疏TIN。为了在构建TIN时避免生成狭长三角形及保证三角网中的三角形的规则性,需要满足两个条件:一是构成的三角形的外接圆内部与圆上没有其他点,二是三角形的最小内角之和最大化。
5)提取地面点。如图1所示,通过设定的滤波参数选取基准三角网附近新的地面点加密三角网。其中,基准三角网与新的地面点O(x0,y0,z0)的垂直距离d为长度滤波参数。θ1、θ1、θ3为角度滤波参数,公式分别如下:
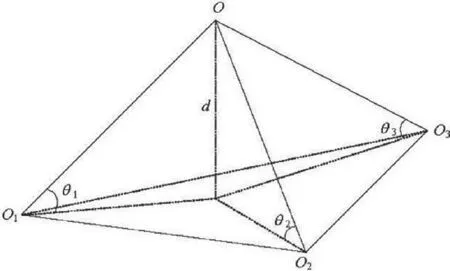
图1 滤波参数示意图Fig.1 Schematic diagram of filtering parameters


式中,SOi为点O至三角形3个顶点之间的距离;(xOi,yOi,zOi)为顶点坐标。
在地势起伏较大的山区,角度滤波参数的阈值不能设置过小,否则会有相当一部分地面点无法提取;在地势平坦区域,阈值可以设置很小。针对不同的区域条件,结合角度、长度参数进行滤波,可以有效滤除狭长的建筑点、低矮的植被点,达到理想的滤波效果。提取地面点时,首先计算激光点所在三角形及滤波参数,如果滤波参数大于阈值,那么该激光点为非地面点,如果参数小于阈值,将该点作为地面点提取。
1.3 道路边界提取
1.3.1 边界点粗提取
计算某点以及局部点通过距离的最小二乘准则拟合得到平面,将该平面的法向量定义为该点的法向量,所有激光点可以此方法得到激光点的局部平面。通过主成分分析的方法构建激光点的协方差阵,计算矩阵的特征值,最小特征值所对应的法向量就是该点的法向量。将z坐标轴与激光点法向量之间的夹角记为a,显然,路缘点云与道路点云之间的a角相差较大,可以通过角度差异进行道路边界点的提取。
通过扫描车后一时刻与前一时刻之间的轨迹点确定车辆的前进方向。以激光扫描仪的每条扫描线为基本单位处理地面点云,根据几何关系可知,扫描线与车辆前进方向垂直,可以近似表达为道路的断面线[8]。通过设置z轴与法向量夹角阈值的方式对路缘点进行聚类,对满足条件的激光点构建激光点集。在激光点集中选择高程低的激光点作为提取的道路边界点(图2)。

图2 点云聚类示意图Fig.2 Schematic diagram of point cloud clustering
1.3.2 边界点细提取
粗提取的结果可能也包含了隔离栏杆、树木等底部轮廓点,为了将提取结果中非边界点剔除,本文以激光扫描车的行驶轨迹为参照,以与行驶轨迹垂直的方向向道路两侧探测,并以连续性分布与距离作为约束条件精提取道路边界点。
对移动车载扫描轨迹点与粗提取得到点云投影至平面,以扫描轨迹上的某一位置为中心构建扫描带,扫描带的宽度为D,且垂直于车辆前进方向,以扫描带宽度D为边长对扫描带进行格网化处理,标记所有包含粗提取点云的格网。移动车载激光扫描车在进行道路点云扫描时,为了获取高质量的点云数据,通常行驶在靠近道路中央位置。因此,扫描车位置与扫描带中的局部道路边界的间距在一定范围变化。计算扫描车与标记格网的间距,设置距离阈值d1与d2,其中d1为1.5倍单车道宽度,d2为0.75-1倍道路宽度。将满足d1至d2范围内标记的格网作为满足距离约束的格网,设置d1的作用是排除道路隔离栏杆对提取结果的影响,设置d2的作用是考虑道路宽度在路口交汇处增大的影响。
如图3所示,对满足条件的格网进一步进行3×3的格网划分,基于道路边界呈连续分布的直或者曲线这一特征,从标记含有粗提取结果的格网中提取满足连续分布特征的格网集合。为了避免将建筑物底部轮廓被误作为道路边界进行提取,选择距离扫描车较近的格网集合作为道路边界提取结果。通过上述步骤即可精提取得到道路边界。
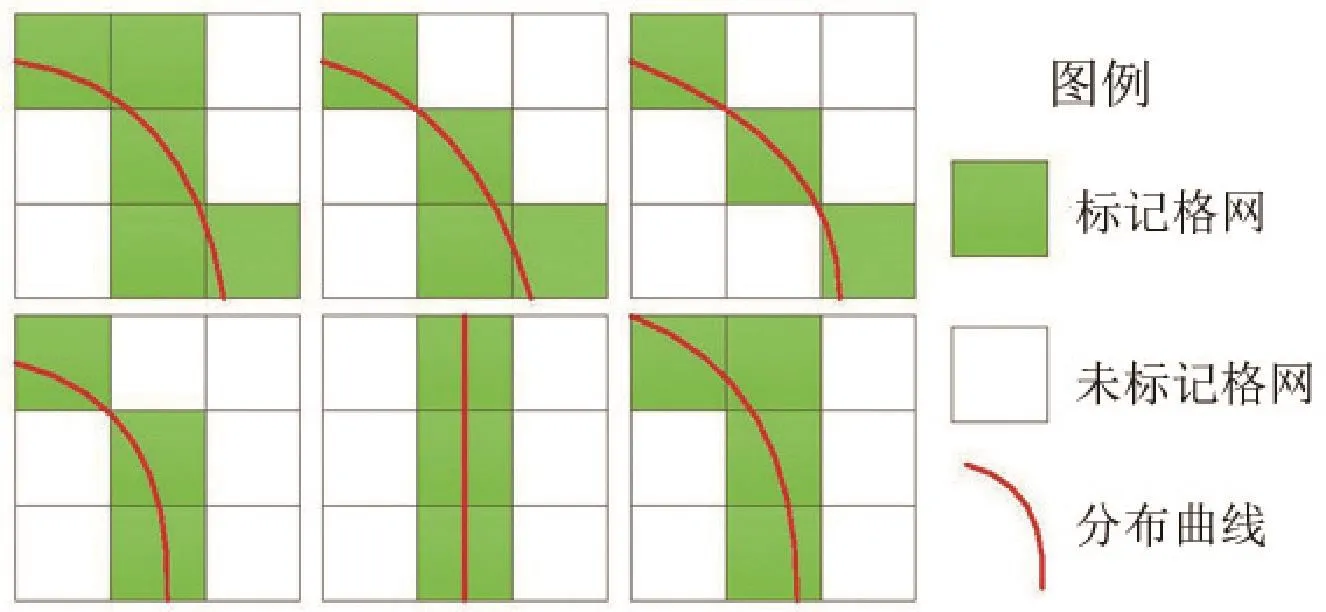
图3 根据连续分布特征进行道路精提取Fig.3 Fine road extraction based on continuous distribution features
1.3.3 结果聚类
取格网尺寸为点云间距的2~3倍对精提取结果进行格网化,将边界点所在格网作为种子,搜索邻域格网。将种子格网与邻域非空格网中心夹角、邻域非空格网数量作为聚类条件进行邻域生长。将格网数量小于n0的聚类集合删除,n0为聚类阈值。
1.3.4 边界拟合
由于环境遮挡等,导致线段连接后的道路边界存在缺失,并且道路边界含有大量点云,得到的3D矢量数据仍不能满足地理数据更新。所以需要将道路边界点重采样与内插得到矢量化边界。Bezier曲线已经广泛用于曲线拟合,Bezier曲线中点的参数方程表示为[9]:

式中,Pi为第i个顶点的坐标;Bi,n(t)为n阶Bernstein基函数多项式,表示为:

式中,k为0至n的系数。根据Bernstein基函数特性,如果n=0,那么Bezier可视为一个顶点;如果n=1,那么Bezier可视为一条直线,这条直线连接两个顶点;如果n≥2,那么Bezier可视为一条曲线。
通过Bezier曲线拟合线段,曲线控制点的个数n与函数的次数应当一致。拟合高阶Bezier曲线的计算量随着控制点个数的增大而提高。可以通过多段Bezier曲线组成整段Bezier曲线的方式得到理想曲线,为了使得到的整段Bezier曲线更加光滑,分段Bezier曲线需同时满足两个条件,一是相邻两个控制点与连接点需在同一直线上,二是保证上一段曲线的终点与下一段曲线的起点为同一点。分段Bezier曲线形状可通过4个顶点进行控制,并且采用3次Bezier曲线,公式为[10]:

式中,P0—P3为Bezier曲线的控制点;P(t)为插值后Bezier曲线中的某一点,将式(9)转化为:

式中的系数矩阵就是三阶Bezier控制矩阵。
通过以上描述可知,Bezier控制点可控制矩阵能够将曲线转化为多段直线,获得矢量化的道路边界,从而实现路面边界提取。
2 实验与结果分析
2.1 实验数据
实验数据采集使用的移动车载激光扫描系统是由北京四维远见信息技术有限公司自主研制的SSW移动测量系统,可高效、快速完成高精度点云数据采集、街景照片获取等测量工作。融合街景照片、点云数据与位置姿态数据,生产得到反映实景空间三维地理实体的彩色点云数据。通过在实验区放置激光标志点,采集标志点坐标,同时在点云场景中采集对应点坐标对点云进行精度检测。检测原始点云数据的平面精度为8.4 cm,高程精度为5.7 cm。通过车载扫描系统采集两段典型城镇道路点云数据(图4),弯曲道路长约为300 m,共包含3 758 943个激光点;平直道路长约为150 m,共包含1 895 341个激光点。两段道路数据中都包含路灯、行道树等道路典型附属设施。

图4 原始车载点云数据Fig.4 Original vehicle point cloud data
2.2 非地面点滤波
通过式(1)—(3)确定种子点,构建TIN;通过式(4)和(5)确定参数ai与d;通过Matlab软件计算得到所有参数。调整地面点提取参数,按照测区最大建筑物尺寸设计格网间距,格网间距与单格网内最少点数的大小呈正比。角度与长度参数要根据测区实际环境进行调整,达到理想的地面点提取结果。
调整完地面点提取参数后,即可完成非地面点滤波与地面点提取(图5)。对比图4与图5,本文提出的滤波方法可有效提取地面点,达到了理想的滤波效果。

图5 点云滤波结果Fig.5 Point cloud filtering results
从传统滤波方法与本文滤波方法的统计结果(表1)可以看出,本文的滤波方法能更完整保留地面点,提高滤波效率,粗差点与格网数量都明显减少。

表1 滤波结果统计Tab.1 Statistics of filtering results
2.3 道路边界提取
通过粗提取与精提取相结合的方式提取道路边界点。首先粗提取两段道路点云中法向量与z轴夹角余弦值在0~0.9范围的点云;其次将扫描带宽度设置为0.6 m,距离阈值d1设置为6 m,d2设置为15 m,结合道路边界点连续分布特征实现精提取。将结果聚类格网边长设置为0.1 m,格网聚类数量阈值为6,种子邻域非空格网数大于2个,限制夹角为135°或180°。
通过上述结果可以看到,本文提出道路边界提取算法不仅对于平直道路有较好的提取结果,对于弯曲道路也有较好的适应性,经粗提取、精提取与拟合后的道路边线可以连续完整地表达出道路边界特征,在由于地物遮挡产生空洞处依然位置准确且连续。
2.4 精度统计与分析
为了定量评价本文道路边界提取方法的精度,将检测质量Q、完整性R、准确度P作为定量评价指标。3种评价指标的计算公式为[11]:

式中,TP为正确提取的边界长度;FP为错误提取边线长度;FN为未提取的边线长度;FM为由于点云缺失无法提取的边线长度。由统计得到的道路边界提取精度(表2)可知,本文算法提取道路边界的准确度较高,两段道路的提取总体检测质量均在95%以上,提取完整性均在94%以上,提取准确度均在90%以上。

表2 道路边界提取精度统计Tab.2 Road boundary extraction accuracy statistics
在两段道路点云场景中均匀采集20个道路边界点作为检测点,计算检测点与本文提取得到的道路边界线之间的平面距离(表3),可见检测点与提取边界线的间距均在3 cm以内,表明提取边界线位置准确。

表3 道路边界线精度检测Tab.3 Precision detection of road boundary lines
3 结 论
本文依据移动车载激光扫描系统及城市道路车载激光点云特点,提出一种道路边界自动提取的方法。为了对该方法的可靠性进行检验,使用两段道路点云数据进行算法验证,并且对道路边界提取结果进行定量评价与分析。实验结果表明,本文方法在非地面点滤波中有着较好的效果,根据道路边界特征进行法向量聚类,实现道路边界的粗提取,通过构建车辆轨迹约束条件实现道路边界的精提取,最后经结果聚类以及Bezier曲线实现道路边界的拟合。本文提出的算法在城市区域道路边界提取中具有较好的适用性。
