基于数字波束扫描定位技术的非线性节点探测器
2022-07-14区健川史伟伟
区健川,徐 渊,史伟伟
(1.深圳大学 电子与信息工程学院,广东 深圳 518060;2.深圳技术大学 大数据与互联网学院,广东 深圳 518118)
0 引言
非线性节点探测器是通过发射基波,利用当遇到有非线性目标会辐射出谐波或者组合谐波的特点,来对非线性目标进行探测。该类探测器主要用于搜索和定位的电子元器件,广泛应用于安防和电网检测。电子产品的微型化更有利于电子设备的伪装和藏匿,但传统安检设备的检测能力并没有很好的提升,经常发生漏警或误警,无法更好地保障公共安全以及在考场的防作弊要求。除了市场对非线性节点探测器提出更强的探测能力要求外,目前民用的便携式非线性节点探测器只能靠器械或人手移动探测设备去搜索和定位目标,这样的非线性节点探测器远不能满足市场的应用需求。
相控阵可以利用灵活的数字波束形成技术对检测目标进行大范围角度的扫描,然后利用幅度差值进行目标定位,而且由于使用的是独立的有源天线阵列,会在空间中对各子发射机的功率进行合成,更容易形成大功率的基波发射,提高设备探测距离。
利用基于FPGA 的硬件处理优势实现数字波束形成或者探测器已经备受关注。文献[5]利用FPGA 实现了应用于5G 系统的MIMO 技术,且通过算法优化使数字波束形成具有自由度高和低功耗的特点。文献[6]为了设计一款便携式的光谱分析仪,选用FPGA 作为光电探测器的主控方案,以使其具有成本低、体积小的特点。
目前文献大多采用标准FPGA 评估板实现板级验证,而且鲜有采用数字波束扫描技术的非线性探测器面市。本文主要从产品应用出发,采用PCB 全定制的方案设计一种融合数字波束扫描技术和多接收天线的相位法测向,具有探测范围大且目标测向功能的新型非线性节点探测器。
1 理论分析
1.1 数字波束形成技术
平面相控阵天线是指天线单元呈矩形分布在二维平面上,主要依靠每个阵列单元的相位变化实现天线波束在空间进行指向或者扫描。传统的相控阵雷达通常是在射频调制阶段对天线单元信号的衰减器和移相器进行控制,采用的是一种模拟的方法实现对发射波束的幅度和相位进行加权;而数字波束则采用数字加权的方法对幅度和相位进行处理,这种方法称为数字波束形成。相控阵的数字处理系统对数字波形发生器中各路发射通道的波形进行幅度和相位加权,并送至各射频模块中,最终通过天线单元在扫描空域形成不同方位指向的数字波束。
图1 是由×个阵元单元组成的均匀平面阵列,其中为竖直方向阵元数量,为水平方向阵元数量,为竖直方向阵元间距,为水平阵元间距。现以原点处为矩形面阵的基准,表示波束的方位角,表示波束的俯仰角。根据波束指向的方位角和俯仰角,可计算出相控阵元在二维平面竖直方向上的相位差为:
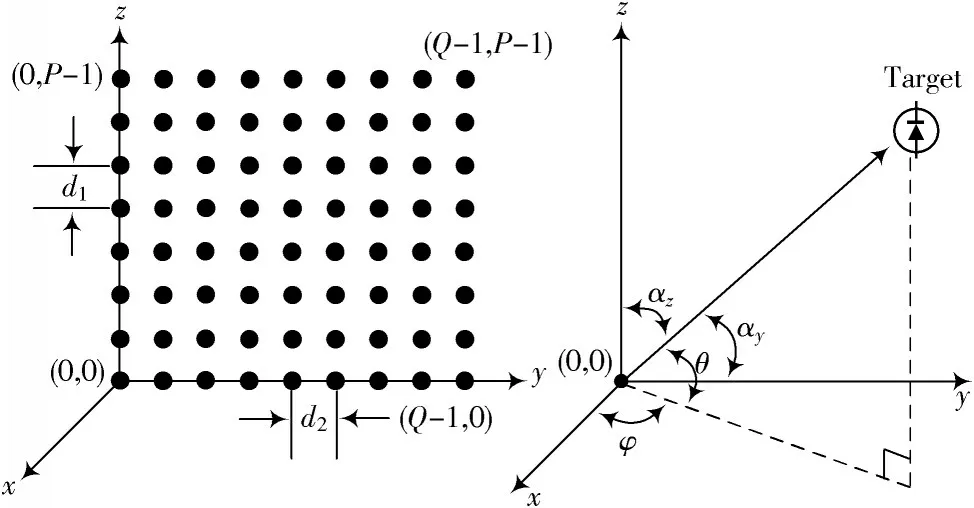
图1 矩形面阵天线阵列及其坐标示意图

二维平面水平方向上的相位差为:

式中:cos α=sin;=cos α=cos·sin。
设天线自身移相器对竖直方向上相邻阵元间的相移量为Δφ,对水平方向上相邻的相移量为Δφ,则对坐标为(,)的阵元移相器引入的总相移量为:

1.2 比幅-比相测向原理
数字波束探测目标可以通过提高射频频率或增加天线单元提供较窄宽度的波形进行空间扫描,达到更好的定位精度。若射频频率大幅提高,对系统设计的抗干扰、抗泄露和滤波能力是一个不小的挑战;若增加天线单元和发射通道,最少增加1 倍的发射通道才能使波束宽度降低一半,但相应射频器件、滤波器件的成本和探测设备体积与重量也会大幅度上升。多天线接收的相位法测向就可以同时兼顾较低成本和较简单的设计方案,只需要增加一组水平和垂直的双基线接收天线,再根据水平和垂直方向上的相位差即可计算出平面上目标的方向。另外对于相位法测向中相位模糊问题,可以利用数字波束指向的比幅进行粗定位,解出唯一的相位周期。比幅-比相测向原理采用数字波束指向测幅和双基线相位测向相结合,利用垂直和水平的双基线测向可以测量出二维平面的目标方向,同时利用比幅测向来解相位法测向法中可能存在的相位模糊问题。测量过程首先利用16 组不同方位的波束进行空间扫描和比幅测向,测出粗方位来选定目标所在真实位置;再利用相位差测向公式确认目标所在的准确方位。
带有相位模糊周期的求解入射角度的表达如下:

式中:为检测目标的入射角度;为基准天线的间距;为相位模糊周期;为接收天线相位差。即要求出值,然后才能得到要求的角度值。
为了保证可测的入射角度最低±40°,本设计选用发射射频频率为2.4 GHz,接收天线间距为9 cm,保证了较大的有效入射角度。如图2 所示,对于平面上垂直方向和竖直方向的模糊周期还是各存在2 个,即=-1(-45°~0°)或=0(0°~45°),将接收到的相位差代入式(4)会解得2 个入射角θ和θ,这就是相位模糊的问题。解相位模糊方法是按波束的不同指向将平面空间划分为16 分区(zone1~zone16),当相控阵的数字波束测量到目标的最大幅度在zone1,得到轴基线N=-1 和轴基线N=0,即可解出唯一的入射角为θ和θ。最后系统根据计算水平和垂直相位差的结果与分界值的大小来判定目标的真实位置。
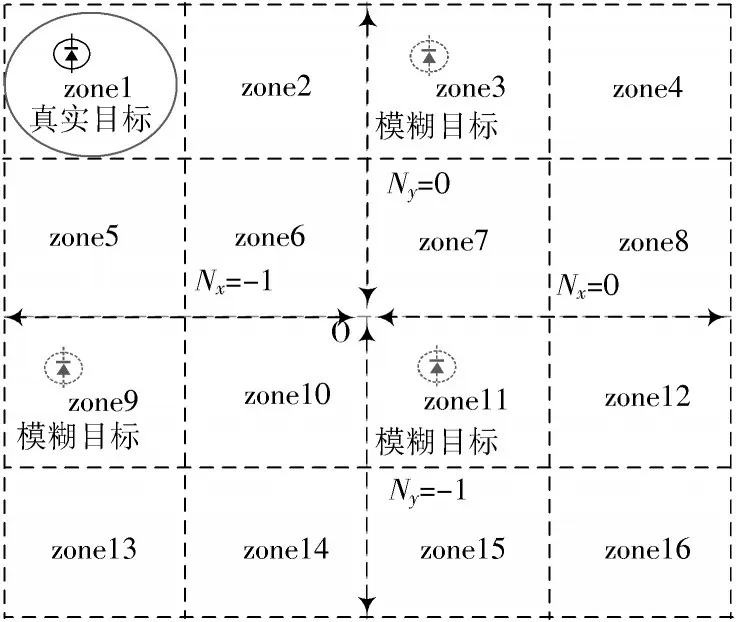
图2 比幅测向测角体制解相位模糊的示意图
在本文系统中,如果仅使用相位法测向的方法,就不能区分出图2 的其他3 个模糊目标,而且当出现多个目标时也不能计算正确结果。如果仅使用振幅法测向,由于近似圆形的数字波束并不完全等于分区的区域大小,当目标在波束的死角或者重叠的位置就会出现较大误差,利用该方法能做到解相位法中相位模糊问题并且测向精度不降低。
2 系统设计
2.1 总体架构设计
本系统分为基带板、射频板和天线板三部分。其中基带板作用是Analog-Digital 信号转换、基于Zynq 芯片的数字信号处理、MCU 控制和人机交互平台;射频板作用是完成对基带信号上下变频、滤波、接收谐波的低噪声放大、载波频率的调制与解调;天线板作用是完成射频信号发射和检测目标的回波接收前端。图3 所示为相控阵非线性节点探测器的总体系统框架。本非线性节点探测器的发射前端采用4×4 矩形的16 发射天线阵实现数字波束方向控制,接收前端采用了菱形分布的4 接收天线阵元,通过水平、垂直天线接收到的相位差去判断目标方位。系统为了方便操作和直观显示目标定位,增加了摄像头和LCD 显示器等人机交互平台。本设计的谐波雷达系统基带板、射频板、天线板实物如图4 所示。

图3 系统总体框架图
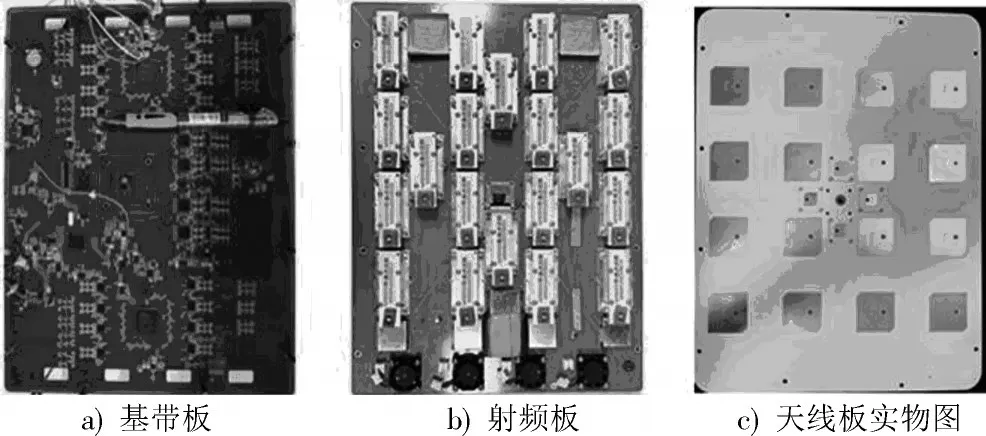
图4 谐波雷达系统
对于发射通道,FPGA 调用DDS 模块生成基带信号,数字基带信号被DAC 接收后转换为模拟信号,再与锁相环产生的载频信号2.45 GHz 进行正交调制,得到频率合适的射频信号。发射通道间的低通滤波器会对电子器件自身的非线性特性产生的高频泄露或谐波干扰进行滤除。
对于接收通道,因为接收天线收到目标所辐射的二次、三次谐波能量较弱,需对其进行前端的低噪声功率放大处理,经放大后的谐波信号与PLL 分频得到4.9 GHz 和7.35 GHz 解调载波,在I/Q 正交解调器上解调出低频基带信号。基带模拟信号会再次经低噪声放大器放大,ADC 会把模拟信号转换成数字信号,再传送到FPGA 进行数字信号处理。通道间泄露发射信号及运放非线性产生的干扰会被接收通道中的高通滤波器进行抑制,另外也有带通滤波器对于本振信号以外的干扰进行抑制。
系统中唯一的时钟电路本振(Local Oscillator,LO)作为FPGA 乃至整个系统中提供全局时钟的基准,对于FPGA 可通过内部的PLL 实现更高的系统时钟,或者带动DDS 输出带有调制信息的基带信号。与此同时,LO也为ADC/DAC 的数模转换电路以及射频信号处理硬件部分的高性能PLL 提供了时钟基准。通过整个系统共用同一个本地晶振,保证了调制信号和解调信号的相位一致性,减少不同接收天线单元中的相位误差和系统杂散干扰。
2.2 FPGA 硬件架构设计
本设计基带板中FPGA 芯片与ADC/DAC 在布局布线后的PCB 版图如图5 所示,本设计FPGA 选用了2 片Zynq7020 芯片和1 片Zynq7030 芯片。
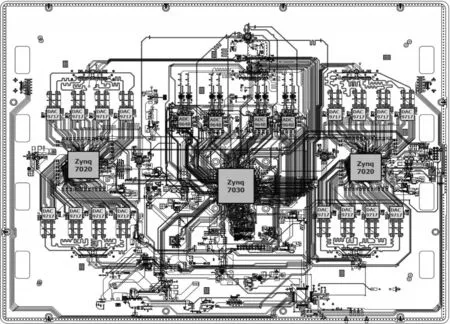
图5 基带板PCB 版图
Zynq7020 负责对基带信号进行调制并发送到DAC9717,由于每片Zynq7020 最多可配置I/O 为194 个,而每片DAC9717 占用17 个I/O,使用2 片Zynq 保证足够I/O 资源控制DAC 芯片,可以对16 组发射通道的DAC 同时进行幅度和相位的配置,达到更快的数字波束偏转指向。
Zynq7030 有更多逻辑资源和可配置I/O,负责ADC接收的基带信号处理和解调信息,而且作为主机与其余Zynq7020 采用SPI 协议通信。此外,Zynq7030 还负责人机交互平台和系统总控,例如对摄像头和LCD 进行驱动和控制,若检测到目标,在LCD 上显示目标所在位置和发出报警鸣声。
2.3 软件架构设计
本系统的FPGA 程序主要包括数字波形形成模块、数字信号处理模块、外设芯片驱动模块和人机交互平台模块。FPGA 程序分别由3 片Zynq 芯片实现,软件系统框架和功能划分如图6 所示。
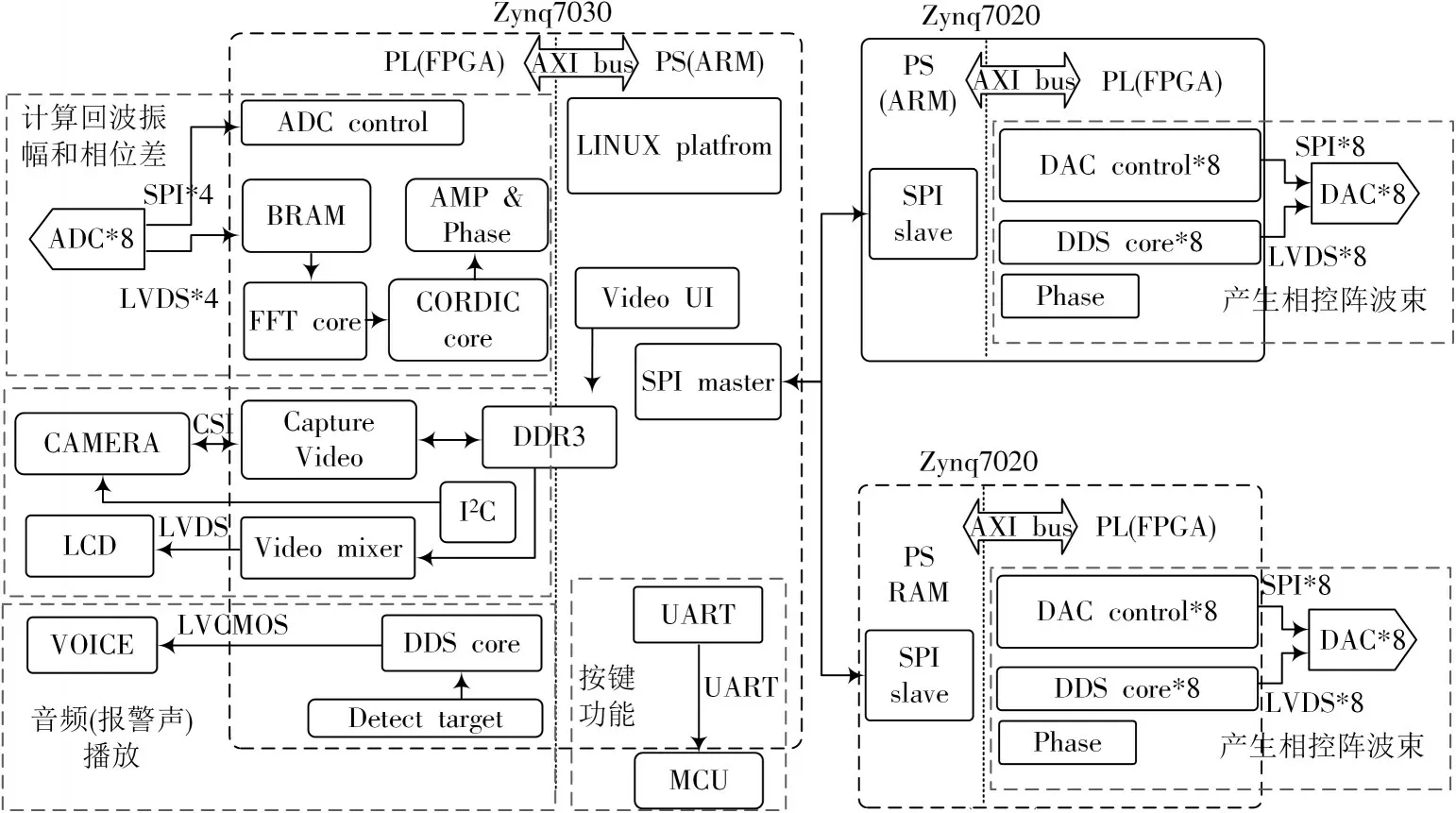
图6 FPGA 系统框架和功能划分
其中,Zynq7020 的数字波束形成模块包括根据波束指向的指令接收和对16 组DDS 的相位和幅度配置,并且使能DAC 和射频发射波束;Zynq7030 的数字信号处理模块包括对ADC 采样数据进行FFT 计算,再利用相关的算法对频谱信息进行解读分析,根据得到的信息对目标进行测向定位;人机交互平台包括摄像头采集图像、LCD 显示驱动、用户按键和报警鸣声控制。
2.4 工作流程图
本设计的FPGA 程序模块是一个以固定频率工作的,不断控制脉冲重复发射和数字信号处理的过程。本系统的工作流程如图7 所示。

图7 系统工作流程
流程图中SYNC 同步信号是由Zynq7030 主控制的、时序是1 ms 高电平、5.25 ms 低电平的不断循环的脉冲信号,系统在每次SYNC 信号高电平开始发射射频信号并对接收信号进行处理。
当接收到SYNC 信号为高电平时,Zynq7020 根据波束指向去配置DDS 的相位并发射射频信号,其中不同波束指向的相位信息已做成查找表,波束转向时系统可以快速读取对应相位。
在Zynq7020 发射波束后,Zynq7030 开始采集ADC信息并对数据进行FFT 计算,得到每路采样通道的信号幅度和相位。在100 ms 完成16 组不同指向的波束发射并计算接收数据结果后,再根据上文的比幅-比相的方法定位出目标所在方位,最后将目标方位在LCD 显示屏上显示并发出报警声。
3 系统测试
3.1 数字波束指向偏转
测试环境如图8 所示,在距离1.5 m 白板的矩形平面中每隔10 cm 设置一个测试点,使用频谱分析仪测量每个测试点的发射天线功率,最终利用Matlab 进行数据分析并绘制成以功率强度为投影的等高线图。
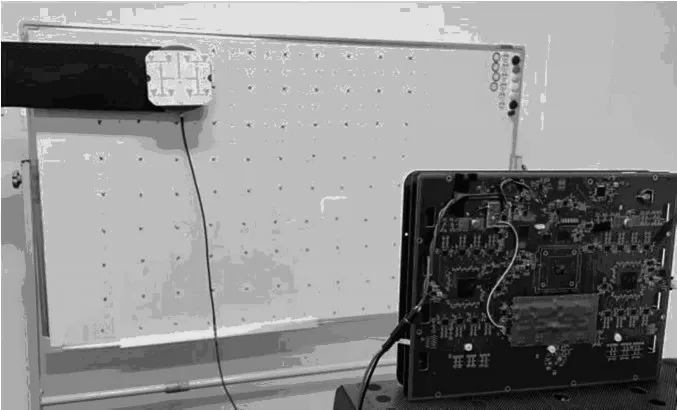
图8 相控阵数字波束指向的测试环境
图9 是数字波形不同空间指向的发射功率等高线图。按波束宽度的计算公式,发射系统在指向zone6,=7.5°时的波束宽度为=27°,当波束偏移角度较大时,波束宽度也会相应变小。在输入数字波束偏转角度后,波束发生对应的偏转,分别指向zone1、zone6、zone11 和zone16,实现了基于FPGA 的数字波束转向的控制。

图9 不同波束指向的功率等高线图
3.2 系统测角准确性
图10 所示为测试环境,在LCD 显示器上,系统会将摄像头采集到的平面图像分为16 分区,当计算结果定位到该分区存在检测目标时,会同步在LCD 上对该分区使用红色框对检测目标进行标定。

图10 实际性能测试环境
本测试将探测平面划分为16 分区,使用测试试样从1 号区域开始,每隔30 s 时间转到下一个区域,最后停留在16 号区域,重复100 次,观察并统计系统能否每次都能正确识别出测试试样所在的区域,其结果如表1所示。定位错误主要原因是测试试样过于靠近区域边缘导致的误判,统计结果显示定位正确率均在95%以上。
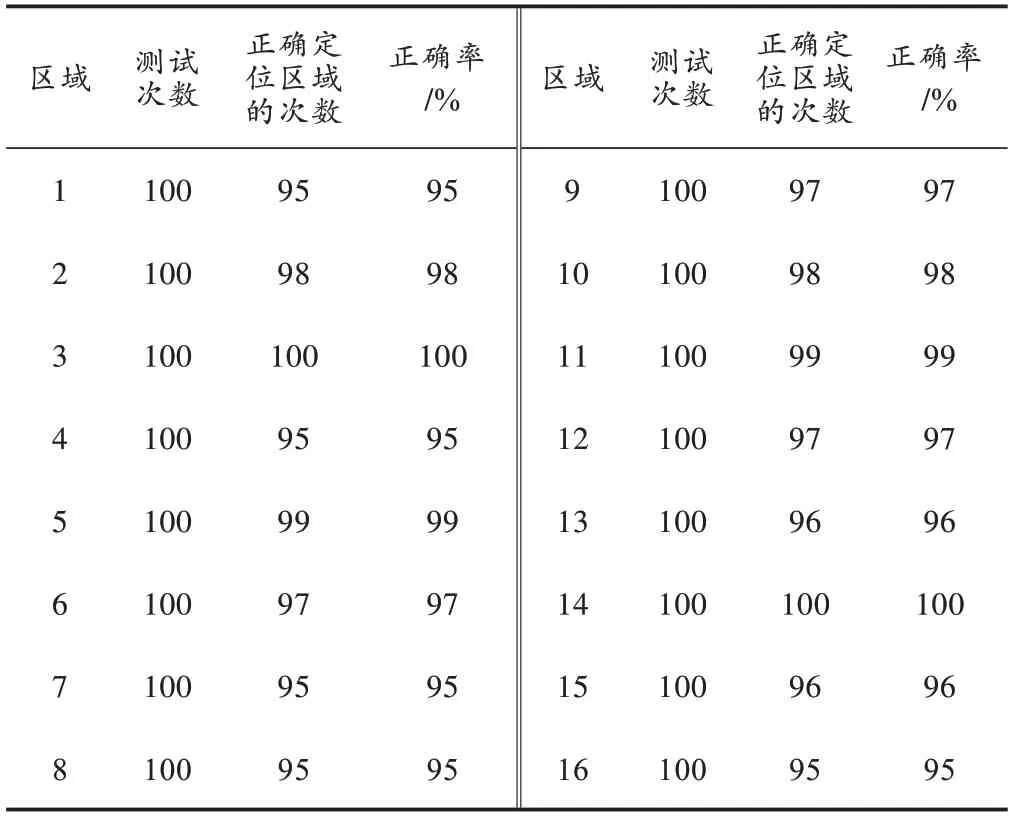
表1 雷达系统成功定位检测目标方位统计表
3.3 最大可检测距离对比
除了测试本设计的测角定位准确性外,还需要测量本非线性节点探测器系统与同类产品对不同电子产品的最远可检测距离。安卫普科技的AT801 是一款成熟的非线性节点探测器产品,采用单发射和单接收天线,探测距离较短,而且只能靠移动探测器对小范围的目标进行定位。本文设计采用16 发射和4 接收天线阵列,具有大范围扫描定位功能和更远探测能力。其中两款产品实物如图11 所示。其中测量的对比数据如表2 所示。

表2 不同电子产品的最远可检测距离cm
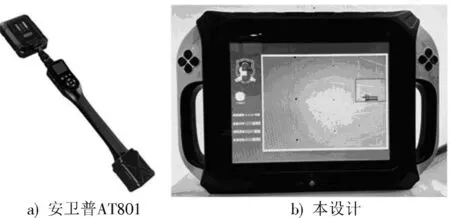
图11 两款非线性节点探测器实物图
通过两款产品的最大检测距离对比可见,本设计因为采用了16 个发射天线,数字波束形成可对子天线的发射功率进行空间上的叠加,所以对于同样的目标可达到更远的测试距离。
4 结论
本文以相控阵和多天线接收定位技术为切入点,设计一款扫描范围大、探测灵敏度高的数字波束扫描和多天线接收定位技术非线性节点探测器。与目前常用的非线性节点探测雷达设备比较,本文相控阵非线性节点探测器除了具备大于-125 dBm 灵敏度的探测非线性目标功能外,还能通过数字波束形成的技术实现更大范围搜索,而且测向定位正确率达95%以上。另外,本文相控阵非线性节点探测器是基于Zynq 的SoC 芯片(ARM+FPGA)实现,具有高集成度、速度快、功耗低等优点,而且还具有直观的可视化人机交互平台、便携性好等特点。
