悬臂式掘进机自动截割控制系统研究
2022-07-13周开平张宁波孙红杰王利欣
张 磊 周开平 张宁波 孙红杰 王利欣
(1.中煤华晋集团有限公司,山西 河津 043300;2.中国煤炭科工集团太原研究院有限公司,山西 太原 030006;3.中煤华晋集团有限公司王家岭矿,山西 河津 043300;4.中煤(天津)地下工程智能研究院有限公司,天津 300120)
随着煤矿综合机械化水平的不断提高,新理论、新技术及新材料逐渐应用到掘进机的研制及应用中,自动化、智能化及无人化是悬臂式掘进机未来发展的方向,国外掘进机的研发重点是操作简便化、自动化及人员安全化,实现电机功率自适应调节、记忆截割路径控制、遥控控制及工作面工况监控等功能,我国悬臂式掘进机整体配套性好、设备可靠性高,国内煤机企业和高校也在掘进机位姿检测、定位定向掘进、工况视频监控、超视距操作及自动截割控制等方面进行理论研究和实践应用[1-2]。但悬臂式掘进机在巷道掘进过程中仍然存在一些问题和不便,一是掘进工作面环境差、粉尘大、光线暗、劳动强度大,安全性低、主要依靠人工进行本机操作,易出现超挖、欠挖现象,影响掘进工作面进尺速度和巷道断面成形质量;二是掘进机自动化程度低、适应性差,掘进工作面速度和效率还达不到煤矿安全高产高效要求;三是掘进工作面设备自动化截割一直落后于全自动无人值守的综采工作面设备,采掘失衡、采掘接续的矛盾更加突出。
因此,本研究通过悬臂式掘进机悬臂机构运动数学模型融合位移传感器、动态倾角传感器及角度传感器等多种传感器融合使用,由控制单元控制升降油缸和回转油缸的伸缩长度及悬臂机构的摆动角度,按照巷道工艺循环作业,控制截割头在巷道煤壁的运动轨迹,实现掘进工作面巷道断面自动截割,保证巷道成形标准化。
1 悬臂运动数学模型
掘进机工作时通过对称布置的升降油缸和回转油缸实现悬臂机构垂直上下摆动、水平左右摆动及复合运动来完成巷道截割断面,巷道截割断面成形的尺寸大小与悬臂机构及其摆动的角度有关,根据这一特性建立悬臂机构的数学模型,确定截割头在巷道断面投影的位置坐标与驱动油缸伸缩长度及摆动角度之间的数学关系,通过控制升降油缸和回转油缸的长度即可控制截割头的运动轨迹[3-4]。
以EBZ220型悬臂式掘进机为例,掘进机悬臂机构垂直摆动和水平摆动分别如图1、图2所示,建立以水平回转台中心O1为原点的坐标系(O1X1Y1Z1)及截割臂与机架铰接点O2为原点的坐标系(O2X2Y2Z2),悬臂水平摆动回转中心O1和垂直摆动旋转中心O2并不重合,掘进机在垂直上下摆动时,以截割臂与机架铰接点O2为圆点,通过升降油缸驱动完成,掘进机在水平左右摆动时,以水平回转台中心O1为圆点,通过回转油缸驱动完成。

图1 悬臂式掘进机悬臂机构垂直摆动Fig.1 Vertical swing of cantilever mechanism of cantilever roadheader
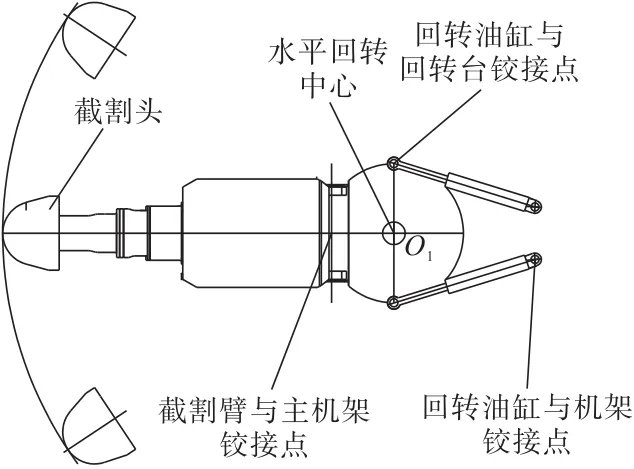
图2 悬臂式掘进机悬臂机构水平摆动Fig.2 Horizontal swing of cantilever mechanism of cantilever roadheader
悬臂垂直平面内上下摆动时,悬臂机构垂直平面内截割投影如图3所示。

图3 悬臂机构垂直平面内截割投影Fig.3 Cutting projection in vertical p lane of cantilever mechanism
升降油缸分别与机架和截割臂铰接点于A和B,截割臂回转中心O2,截割头在巷道顶板时升降油缸位置为AB1,截割头在巷道底板时升降油缸位置为AB2,截割头在水平、最高点及底板上投影于O3、O31、O32,O2A=L1,O2B1=O2B=L2,AB=L0,∠O3O2O31=α,∠O3O2A=φ,∠B1O2O31=θ0,举升油缸的伸长量为l1,截割头在O31时空间位置坐标:

式中,L为截割臂与机架铰接点到截割头中心的距 离,mm;Δl为截割头伸缩油缸的伸缩量,mm;L0为截割臂处于水平位置时升降油缸的长度,mm;L1为截割臂与机架铰接点到升降油缸与机架铰接点的距离,mm;L2为截割臂与机架铰接点到升降油缸与截割臂铰接点的距离,mm;φ为截割臂水平时O2A与O3O2的夹角,°; θ0为 B1O2与 O2O31的夹角,°。
悬臂进行水平平面内左右摆动时,悬臂机构水平面内截割投影如图4所示。

图4 悬臂机构水平平面内截割投影Fig.4 Cutting projection in horizontal plane of cantilever mechanism
回转油缸初始位置分别为O4O6和O5O7,回转油缸与机架铰接点为O4和O5,回转油缸与回转台铰接点为O6和O7,截割臂回转中心为O1,截割臂处于巷道中间位置时截割头在水平、巷道左边及右边投影为O3、O33、 O34,O1O4=O1O5=n,O4O6=O5O7=L3,∠O3O1O33=β,回转油缸的伸长量为l2,截割头处于O33空间位置时的坐标:

式中,r为回转台的回转半径,mm;n为回转液压缸与机架铰接点到水平回转中心的距离,mm;e为截割臂与机架铰接点到水平回转中心的距离,mm。
掘进机悬臂机构进行摆动时,截割头的空间位置只与升降油缸和回转油缸的伸缩量有关,通过在油缸内置安装位移传感器,检测升降油缸伸缩量l1和回转油缸伸缩量l2,经过控制单元计算截割头的位置坐标。
2 自动截割控制方案
悬臂式掘进机进行截割作业时,在上位机中输入断面形状、尺寸大小、进刀排距及排数等参数。根据设定的截割轨迹,对升降油缸和回转油缸发出开启信号,通过控制先导电液比例阀的开口大小及阀口流量,使悬臂做垂直上下运动和水平左右运动;通过油缸内置位移传感器监测油缸的伸长量,动态倾角传感器和角度传感器检测截割臂的俯仰角和偏向角。利用控制单元计算截割头在巷道空间的坐标位置。根据巷道条件,操作人员通过遥控器和上位机进行巷道边界标定、截割轨迹示教并存储截割路径及控制工艺,通过选择记忆截割模式实现巷道掘进一个循环内断面截割自动成形,保证巷道成形标准化[5-6]。巷道断面自动截割控制系统如图5所示。

图5 巷道断面自动截割控制系统Fig.5 Automatic cutting control system of roadway section
3 上位机参数设置
科学合理的施工工艺和截割路径能提高巷道断面成形质量,避免出现超挖、欠挖情况[7-8],在上位机选择巷道断面形状,选择截割轨迹、尺寸大小、进到方式及排距等参数,完成自动行走、自动进刀、自动截割。煤矿巷道断面常见形状有3种,矩形、梯形、半圆拱形,根据巷道截割工艺流程,通常截割工艺路径为自下而上类似S形的断面自动截割控制[9-10]。上位机参数设置界面如图6所示。
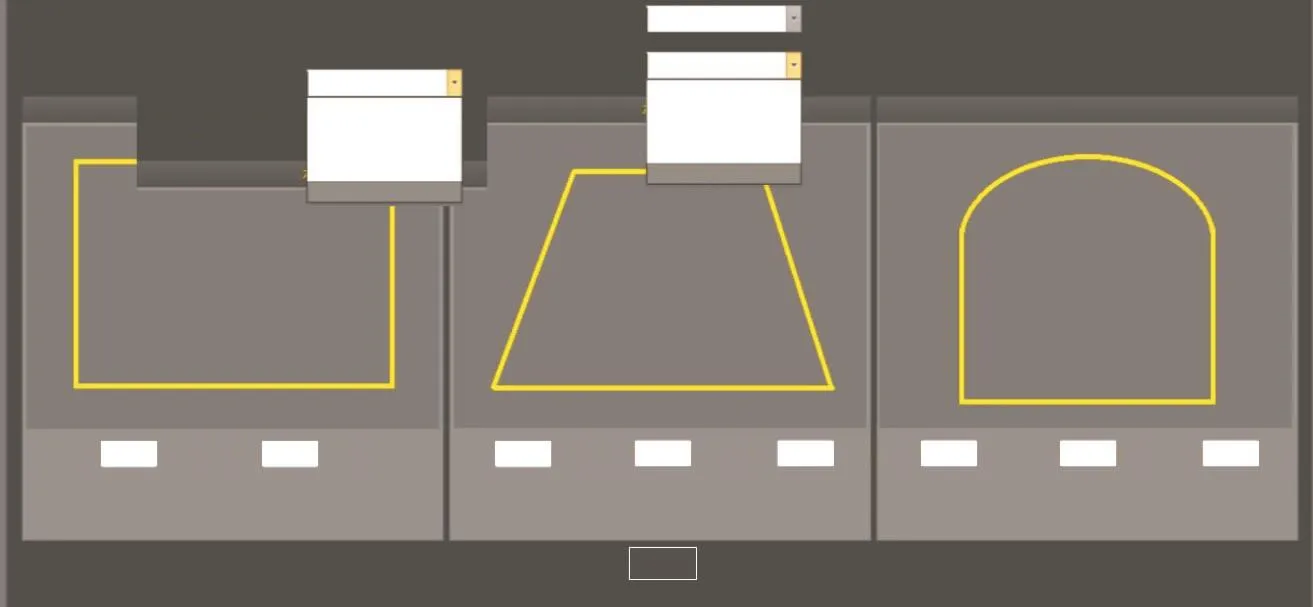
图6 上位机参数设定界面Fig.6 Upper computer parameter setting interface
为实现对截割头空间位置的精准控制,在自动截割的截割工艺路径阶段可加入慢启功能,在每一步停止阶段加入慢停功能,达到减少机身振动、提高控制精度的效果。在掘进机开始截割时控制油缸的伸缩速度来控制截割臂摆速,在截割头位置达到距离目标位置20cm时开始逐渐减缓摆速,直至达到目标位置摆速为零。通过控制每一步的动作进行慢停,用来保证巷道断面的规整[11-12]。
4 实例应用
以EBZ220型悬臂式掘进机自动截割控制系统为例,EBZ220型悬臂式掘进机的主要技术参数见表1。
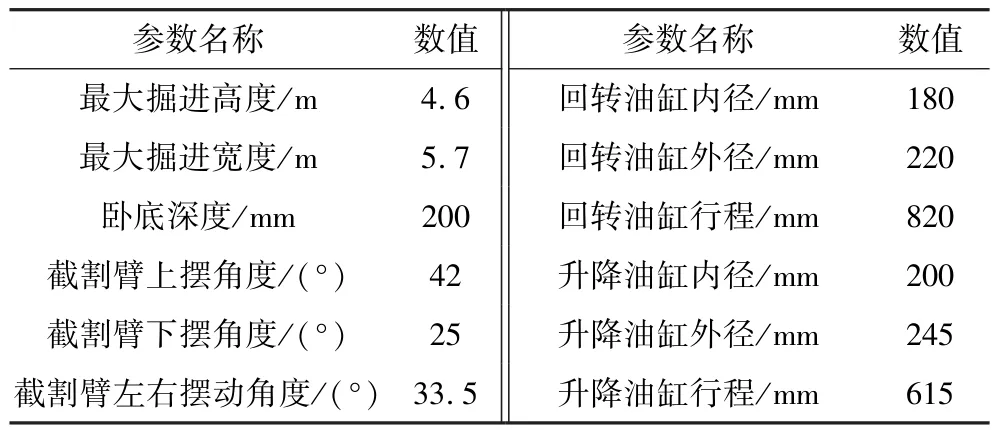
表1 EBZ220型悬臂式掘进机的主要技术参数Table 1 Main technical parameters of EBZ220 cantilever roadheade
EBZ220型掘进机自动截割成形控制系统主要由工控机、PLC控制器、位移传感器、动态倾角传感器、角度传感器、测距传感器、电液比例先导阀组、升降油缸及回转油缸等组成。在升降油缸和回转油缸内置位移传感器,检测升降油缸和回转油缸的伸缩量。在机身设置测距传感器,检测机身距迎头和侧帮的实时距离。在悬臂和机身上设置动态倾角传感器用于检测悬臂和机身的俯仰角。在回转台中心设置角度传感器用于检测截割臂的航向角[13]。电液比例先导阀组用于控制各阀组的开度大小。
根据巷道实际条件,操作人员通过遥控器和上位机进行巷道边界标定、截割轨迹示教并存储截割路径及控制工艺,通过选择记忆截割模式实现巷道掘进一个循环内断面截割自动成形,保证巷道成形标准化[14-15]。该系统具有记忆截割功能,设有5种截割轨迹路径。巷道断面自动截割界面如图7所示。

图7 巷道断面自动截割界面Fig.7 Automatic cutting interface of roadway section
EBZ220型悬臂式掘进机进行地面和井下试验表明,各项功能运行良好,可靠性高、实时性强,能满足掘进巷道断面自动截割作业要求,提高了断面成形质量和截割效率。该系统掘进巷道断面自动成形控制精度≤15 cm/20 m,悬臂动态俯仰角和偏向角测量精度≤0.1°。掘进工作面上位机人机界面如图8所示。

图8 掘进工作面上位机人机界面Fig.8 Man machine interface of upper computer in heading face
5 结 论
(1)自动截割成形控制技术是实现掘进机自动化、智能化截割的新方向,该技术的发展大大减少了人工作业,降低了能耗,避免人工手动操作掘进机出现的超挖和欠挖现象,显著减轻了工人劳动强度,改善了工人作业环境,提高了断面截割成形质量,提高了掘进效率,也为实现掘进机的定向定位掘进和远程控制奠定了基础。
(2)结合巷道断面和掘进工艺要求,通过位移传感器、动态倾角传感器和角度传感器实现截割头相对于机身的位姿检测,经控制单元计算截割头在巷道空间下实时位置坐标。
(3)根据巷道地质条件,制定科学合理的掘进工艺,通过操作遥控器和上位机进行巷道边界标定、截割轨迹示教并存储截割路径及控制工艺,选择记忆截割模式实现巷道掘进一个循环内断面截割自动成形,保证巷道成形标准化。