轨道交通网络化运营信号故障定位研究
2022-07-13齐琳
齐琳
(兰州交通大学,甘肃 兰州 730070)
0 引言
现阶段,我国城市轨道已初步实现了网络化运营的管理模式。但在高压输电线路以及无分支线路的关联配电背景下,实际的信号定位传输程序具有单一的特点,在面对轨道交通环境时,信号传输的分支过多,且故障定位的结构和渠道较复杂,线路长度较短,致使故障定位的结果不准确,容易出现网络化运营信号故障的定位误差[1-3]。信号定位端点的差异以及各网络处理分支节点的变化会使故障点处的波阻形成不连续的情况,造成在对轨道交通网络实现控制的过程中,故障反射行波与定位信号叠加在一起[4-5]。另外,轨道交通的网络化控制与信号的故障定位实际上也存在着较大的联系[6]。传统的信号故障定位效果相对较差,主要是因为定位的方向与模式是单一的,不能满足多方向故障定位的需求。所以,面对这种情况,需依据实际需求,创建更加灵活多变且稳定的信号故障定位方法,以确保轨道交通网络化控制效果的提升[7-8]。
鉴于此,本文将对轨道交通网络化运营信号故障定位进行分析与研究。在真实环境下创建轨道交通网络化的背景,结合双向的信号故障定位模式,采集并汇总相应的定位数据,同时通过双端行波定位法进一步实现网络故障的准确定位,以此优化传统的信号故障定位模式,提升故障定位结果的精准性与可靠性。
1 轨道交通网络化运营信号故障定位方法
1.1 确定信号故障定位奇异点
在设计轨道交通网络化运营信号故障定位方法前,需先确定其信号故障定位奇异点。定位奇异点实际上是信号变化的差值点,通常不是固定的,具有一定的变化性和不稳定性。在实现故障定位前,只有确定奇异点的位置,才能进一步确定故障的实际位置。所以,奇异点的确定也是轨道交通网络化运营信号定位的基础。在这个过程中,获取轨道交通网络的行波信号,当其发生故障时,可通过计算暂态行波来确定奇异核心点的位置。暂态行波核心波形值计算公式为:

式(1)中:W为暂态行波核心波形值;θ为故障影响范围;R为执行作用点的距离值;r为波形误差值。通过上述计算,最终可得出实际的暂态行波核心波形值。依据故障信号的作用位置,结合奇异点的核心距离,最终完成对信号故障定位奇异点的确定。
1.2 提取信号故障定位特征
在完成信号故障定位奇异点的确定后,需依据轨道交通网络化运营情况的变化提取信号故障定位特征。故障定位特征的提取是基于故障定位算法实现的,所以在这个过程中,只有精准地明确信号故障的实际特征,才能编制出具有针对性的定位方法。在上述设定的环境中,传输提取的单极接地故障信号,在负极通路间,为避免其他部分产生故障或异常,需汇总轨道交通网络的执行通路特征。然后,形成较为完整的执行特征提取结构,在轨道交通正常运营的过程中,通过调整对应的指令关联故障定位特征与实际的执行特征,形成融合特征的提取,依据初始的定位程序,完成信号故障定位特征的提取。
1.3 创建多维信号自动定位模型
在完成信号故障定位特征提取后,创建多维信号自动定位模型。通常情况下,对轨道交通的网络化运营信号的处理与定位是相对繁杂的,多项信号的注入与定位实际上与首端配置信号装置具有关联性。故障信号也分为单相故障定位和双相故障定位,而当信号在传输的过程中,单元信号会发生对应的变化,依据变化范围及特定频差值,创建多维度信号自动程序,结合轨道交通的检测范围,进一步建立初始定位模型。轨道交通控制程序故障相位的二次回路所传输的信号可反映故障定位的实际变化特定频差,而当在控制出口处检测信号强度并进行故障判断时,一旦出现异常,主站的传递区域会发出故障警示信号,并实现对应的定位。与此同时,轨道交通的定位处于双向循环中,在故障区域会实现集成定位,轨道交通的各分支定位控制单元也会通过网络发送警示信号,随即携带对应的故障请求数据信号,接收的区域系统可通过特殊的软件读取故障的分支幅值,与相负荷信号融合,形成特定的故障定位信号,采用拓扑关系阵进行定位效果反馈,具体如表1所示。
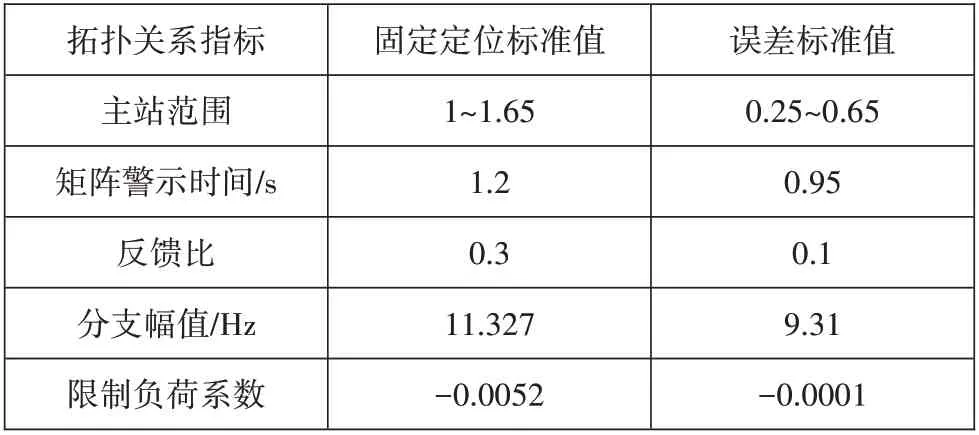
表1 拓扑关系故障定位矩阵标准设定表
根据表1中的数据信息,最终可完成实际的拓扑关系故障定位矩阵标准的设定。依据上述标准及拓扑条件的设立,设计多维信号自动定位模型结构,具体如图1所示。
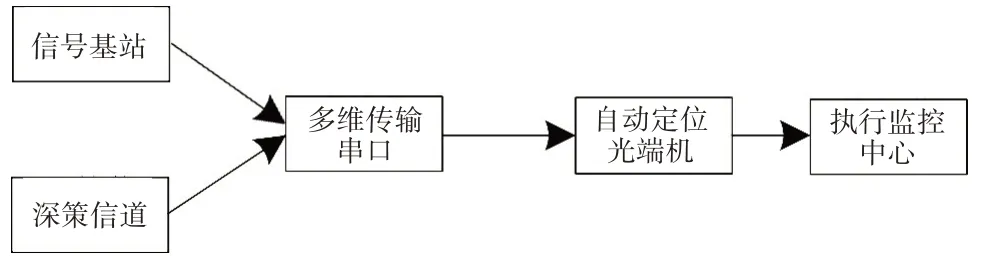
图1 多维信号自动定位模型结构图
根据图1采集信号地故障定位数据信息,最终可得出初始的定位结果。
1.4 通过小波变换模型极大值法实现故障的定位
在构建多维信号自动定位模型后,采用小波变换模型极大值法实现故障定位。在上述初始定位结果基础上,利用小波变换模型极大值法计算出轨道交通网络的末端范围处理值,计算公式为:

式(2)中:L为末端范围处理值;η为小波变换作用范围。通过上述计算,最终可得出实际的末端范围处理值。在上述处理值范围中,结合变换模型极大值和定位模型实现故障定位。
2 方法测试
本次测试主要针对轨道交通网络化运营信号故障定位效果进行验证与分析,测试方法分别为传统的多端信号故障定位法和本文所设计的方法。两组方法同时进行测试,为确保测试结果的准确性,需在相同的测试环境下同时进行,得出相应的测试结果。
2.1 测试准备
需构建仿真信号故障定位测试模型。选取10kV的主电路电压作为测试的电压环境,在每个运营区域中均需设定一个对应的故障定位节点,每个节点均独立运行但在应用过程中存在不同程度、不同方向甚至不同范围的联系,最终得出的效果存在较大差异。信号故障定位节点分别位于母线末端和分支末端之间,所以,为了保证测试结果的准确性,在网络化运行的中心控制区域部分设立相对应的核心定位节点,将信号的检测装置添加进执行电路中,并增加对应的检测设备。但需注意的是,应尽量选择小型的监测设备,避免信号监控及检查时出现误差或偏差,影响中心节点的设定。另外,轨道交通网络化运营的各分支区段对应不同的定位节点,所以在测试环境搭建过程中,需确定定位的实际范围,并按式(3)计算出实际的数值:

式(3)中:H为定位的实际范围;R′为单相定位系数;F为故障关联比;α为定位极限误差。
通过上述计算,最终得出定位的实际范围。依据该范围设立对应的仿真信号故障定位模型,此模型为初始的定位模型,具有一定的单项性。随即进行二次加置,设定故障定位信号的模型传输信道。这部分主要由故障初始行波波头执行时间来确定,定位信号行波值计算公式为:

式(4)中:M为定位信号行波值;K为信号的传输范围;c为传输的预设定位时间。通过上述计算,最终可得出实际的定位信号行波值,将其添加入模型中完成二次设定,进而完成测试环境的搭建。随后,核查测试的准备及系统是否处于稳定的运行状态,同时确保不存在影响最终测试结果的外部因素,核查无误后开始测试。
2.2 测试过程及结果分析
在搭建的测试环境中开始测试。依据实际的故障信号传输需求设立对应的定位波段,在每个波段的终端设定定位节点,依据行波值划分各定位节点,形成大范围的控制波段。将波段的控制区域与轨道交通的控制网络或网络平台相关联,形成统一的控制指令,将其添加在定位的模型中,并将日常的定位数据信息汇总整合,导入信号故障定位模型中,形成定位的初始结果。将各定位节点依据同一协议连接在一起,形成定位总控制区后,使轨道交通网络作出指令变更,设置故障节点,利用模型记录变化的情况及数据信息后,按式(5)计算故障定位的实际误差:

式(5)中:P为故障定位的实际误差;ε为定位距离变化值;υ为允许出现的网络化控制极限差值。通过上述计算,最终可得出故障定位的实际误差。通过对两组测试结果对比分析,得出最终的结论,具体如表2所示。
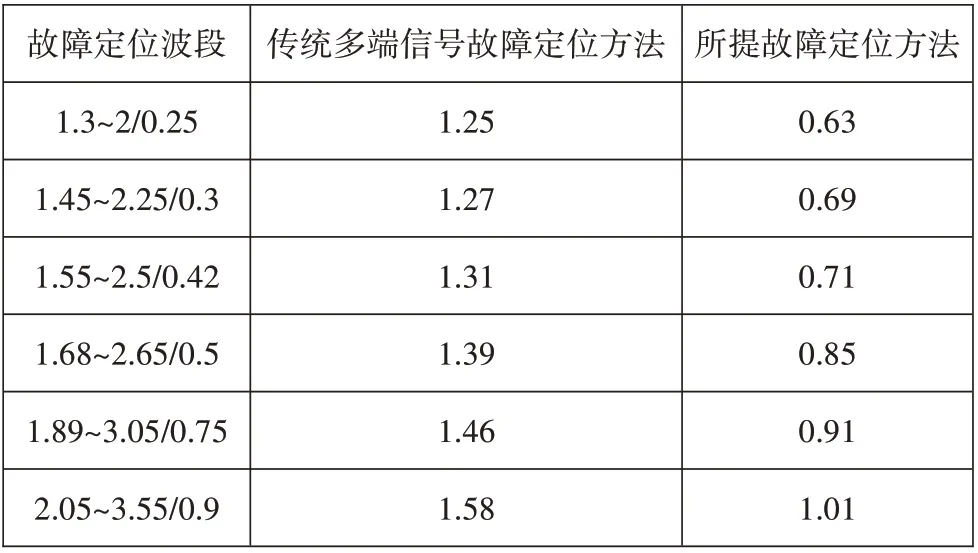
表2 故障定位误差结果对比分析表
由表2可知,在相同的测试环境下,对比于传统的多端信号故障定位测试组,本文所设计的定位方法最终得出的定位误差相对较小,表明其定位的效果更佳,在应变轨道交通网络化运营信号变化的时候,可确保定位的精准性,形成双向定位结构,减少误差,具有实际的应用价值。
3 结语
在轨道交通网络化的运营环境下,对信号故障定位的控制及处理是一项重要的工作。相较于传统的故障定位方法,本文所设计的方法具有更强的灵活性和稳定性,对故障的定位及信号的传输也较为精准。除此之外,不同于传统定位方法的是,本文方法的定位范围更大,在面对复杂或异常情况时,可分化初始的中游负荷,实现临时定位。这种模式就相对更为全面、系统,不易出现大规模或关联性误差,更易实现轨道交通网络化运营信号故障定位,操作定位的过程也相对简便,一定程度上提升了整体的检测定位效率,避免故障定位风险的出现。
