智能机器人在图书馆开架书库中应用研究
2022-07-13王义翠杨爱华
王义翠 杨爱华

摘 要 智能机器人进入开架书库实现自动存取和全程服务,其可行性和效率亟待研究。论文不完全回顾国内智能机器人开架书库应用研究,探讨图书馆用户行为、开架书库实体及人工智能技术发展对智能机器人开架书库工作的影响,提出现阶段策略供业界参考:整体设计,联合研究;人机兼容,稳定有序;设立小规模智能开架书库体验区。
关键词 图书馆;开架书库;智能机器人;人工智能
分类号 G250.7
DOI 10.16810/j.cnki.1672-514X.2022.06.007
Research on Intelligent Robots Work in Open-shelf Stacks in Libraries
Wang Yicui, Yang Aihua
Abstract It is urgent to study the feasibility and efficiency of entering of the intelligent robot in open shelf stacks to realize automatic access and full service. This paper incompletely reviews the research on library roberts work in open-shelf stacks in domestic academic, and discusses the influence of library users’ behavior, library entities and the development of AI technology in the stacks. It puts forward some strategies for reference: overall design and joint research; human-computer compatibility, stability and order are the general principles; small experimental area is to set up.
Keywords Library. Open-shelf stacks. Intelligent robots. AI.
智能机器人技术,是机械、信息、材料、控制、工程等多学科交叉融合的科学和工程技术,已成熟应用于诸多领域。目前智能机器人已进入图书馆管理领域,其在图书馆开架书库的自动存取和全程服务应用领域,仍处于摸索阶段,能否成功运行并大规模推广还需进一步探索。
1 我国智能机器人开架书库管理相关研究
以“图书馆人工智能+开架书库”“图书馆智能机器人+开架书库”“机器人+开架书库”为主题词,笔者在CNKI、维普、万方三大学术数据库中进行检索,截至2021年3月26日,仅有两篇学术期刊论文。智能机器人在图书馆应用,与智慧图书馆概念和RFID技术密不可分,是基于RFID技术在图书馆应用的进一步发展。开架书库是人工智能面对用户最直接且广泛的应用场景,关于图书馆开架书库智能管理的实践和研究需求逐渐凸显。扩大搜索范围,以“机器人+图书馆”“图书馆智能机器人”“图书馆人工智能”“智慧图书馆+开架书库”“RFID+开架书库”等为主题词,在三大学术数据库搜索论及人工智能开架书库管理的相关文章,作不完全回溯如下。
早在2005年,我国就有研究者对智能机器人应用于图书馆书库的可行性进行研究。王晶等提出利用可编程控制器PLC对图书馆作业机器人进行控制的总体设計思路,并给出相应硬件配置和软件设置,以控制机器人自动完成图书上架工作[1]。通过十多年发展,智能机器人在图书馆书库的应用研究与设计逐渐成为一个重要研究领域。
图书馆书库管理业务,主要包括书架图书排架整序、图书盘点、读者图书取阅。智能机器人应用于书库,目的是实现图书定位与导航、图书拾取及图书盘点等作业智能化,提高书库管理效率。因此,构建图书馆书库智能机器人系统,亟需掌握的三项主要关键技术是图书定位技术、导航技术、拾取图书的结构设计技术[2]。方建军等较为全面地阐述了图书馆机器人自动识别、导航、图书存取机械手设计及机器人移动装置[3]。杨学睿提出一种实现图书智能拾取的图书馆机器人自动取书方案并研究相关技术[4]。书库机器人盘点应用研究是最活跃的研究主题,并得到实际应用。沈奎林等人在2016年研究设计了智能图书盘点机器人系统,用于查找书库错架书与图书盘点[5],该机器人系统已在多家图书馆得到实际应用。比如,夏正伟等从智能盘点机器人在武汉大学图书馆的应用情况出发,指出应完善应用场景,增加纠错功能,改进人机界面,优化数据分析[6]。
智能机器人应用于图书馆开架书库管理,依赖于书库真实场景[7],特别是书架排列结构及图书排架方式。冯银花提出智能机器人入驻图书馆,需将书库划分为格子状,并按所在行列编号,每本书所获编码,即其在书架上实体地址[8]。杨爱华等人经实证研究指出,智慧图书馆中开架书库应建立以“列”为阈值的管理单位,列内图书既可有序排架,亦可无序管理[9];开架书库图书分类不能简单表述为进行到某一级,需要多方协同,寻求以“阈值”为单位的多方兼容线性管理体系,明确原有细排架人机兼容特性,重新制定智慧图书馆内部管理与外部评估标准[10];开架书库排架方式以“列”为阈值单位的静态定位方法,能与闭架书库管理和人工智能耦合,与多种排架法兼容,实行精确整架法和模糊整架法两种整架方式并行[11]。
智能机器人全面进入开架书库,管理工作必将发生重大变革,需要研究论证,厘清相关影响因素。
2 智能机器人在开架书库工作相关影响因素
智能机器人应用于开架书库,可能会改变智能机器人现有图书定位、图书盘点等封闭式内部业务。空间的开放性将促使开架书库成为用户借助智能机器人进行图书借阅的人机交互空间。因此,智能机器人应用所面临的环境既要应对不同用户行为,还要面对开架书库中各种客观物理实体的影响,且受到人工智能技术发展的制约。
2.1 图书馆用户行为
用户进入开架书库,主要是完成图书的选择与取阅,其行为主要有两种形式:无目的图书浏览行为与有目的图书搜索取阅行为。这两种不同用户书库搜索行为形式,都影响智能机器人在开架书库应用。
2.1.1 用户无目的图书浏览行为
用户无目的图书浏览行为是用户出于休闲需求,或不明确自身搜索目标,随意在其感兴趣知识领域的开架区域随机抽取读物浏览,非中意书籍放回原处,满足需求的读物则携带至自助机或服务台完成借阅。这一类型行为的用户对开架书库知识分类和书架分布了解程度不一,他们通过无目的浏览获取所需读物,加深对书库布局和知识分类的理解记忆,并期待下一次在该区域的搜索浏览更顺利。虽然这部分用户大多不需要借助人工智能设备完成搜索,随机完成借阅活动,但他们对书库布局和书架秩序稳定性有所要求,这种要求正是智能机器人应用所需要。经常变动的书库布局和书架秩序,对用户的无目的性图书搜索浏览行为显然不利,也无益于智能机器人开架书库工作。
2.1.2 用户有目的搜索取阅行为
用户有目的搜索取阅行为,是用户明确知晓需要某册或某类书籍,根据对标的熟悉程度,展开搜索行为,并采取某种方式完成图书浏览与取阅。
在传统开架书库中,用户有目的搜索取阅行为主要有两种形式。一是直接去自己熟悉的区域浏览取书。这是最便捷的文献获取方式,用户对检索标的和开架书库布局非常熟悉,并且记忆清晰,可以不借助任何搜索工具,直接到开架书库抽取所需借阅标的。二是使用搜索工具查詢后浏览取书。以已知信息路径为入口,输入搜索词,使用搜索工具查询后,得知所需书的分类和馆藏地址,然后按照馆藏布局浏览摸索,逐步靠近搜索标的,取走所需读物,完成借阅。这是现在较为普遍的一种搜索方式,整个搜索过程是以用户对搜索标的和馆藏布局不清晰为前提,需要借助搜索工具完成借阅。
当智能机器人参与图书馆开架书库业务活动,会产生一种新的用户有目的搜索取阅行为,即借助智能机器人全程服务取书。这要求智能机器人具有定位、导航、机械手抓取等技术特征。虽然,目前智能机器人全程服务取书功能尚未成熟,但随着技术进步,智能机器人进入开架书库全程服务指日可待。
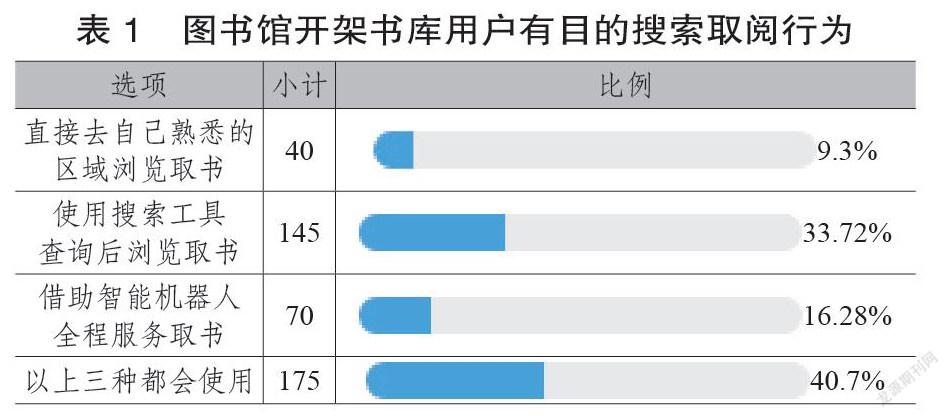
笔者对上述几种行为形式进行用户问卷调查,以了解用户在人工智能进入开架书库全程服务后,各种行为形式的选择倾向。通过对430份有效问卷的统计分析,统计结果如表1所示。
从上述统计结果可以看出:(1)直接去自己熟悉的区域浏览取书的这类读者所占比例最低,整个搜索过程依赖用户对搜索标的和开架区域的熟悉,对开架书库的稳定性和有序性具有较高要求;另外,这类读者可能无需借助智能机器人服务,他们借助智能机器人操作,很大程度上是满足体验感;(2)虽然目前智能机器人在开架书库全程服务取书尚未成熟,但仍有一部分用户有意愿借助智能机器人实现全程服务;(3)近一半用户选择以上三种都会使用,说明有目的图书搜索取阅行为存在随机性和多样性;不同用户的搜索习惯和阅读倾向不一,并非所有用户都会选择智能机器人(全程)服务,更多表现出按需随机采用多种混合搜索取阅方式。
受用户图书搜索取阅行为随机性和多样性的影响,智能机器人应用于开架书库,除了要满足智能机器人机械手抓取动作的便捷性,也要兼顾用户图书搜索取阅方式差异性,而书库书架排架方式的稳定性和有序性是基本要求。
2.2 开架书库实体
图书馆正在向智慧图书馆转型,构建图书馆智慧空间。图书馆智慧空间是集成物联网、人工智能、云计算等Web3.0核心技术,以用户体验为中心,通过感知、分析、记忆、服务用户,整合资源、设备、技术、服务及整个图书馆网络,由物理空间、虚拟空间、用户感知空间等构成的多维空间系统[12]。开架书库作为图书馆智慧空间的基本组成部分,智能机器人在开架书库应用,提高书库智能化,依赖于书库信息基础设备、书架等基础设施完善。
2.2.1 书库信息基础设施
我国很多图书馆在信息基础设施建设方面,还不能满足图书馆智慧空间的要求,开架书库亦是如此。目前,绝大多数图书馆的开架书库都与读者阅览区相连,融藏书、借阅、学习功能为一体。智能机器人应用其中,需要有完善的信息基础设施环境。在智慧化环境下,作为新型基础设施建设主要内容之一,信息基础设施至少包括5G、物联网、工业互联网等为代表的基本通信网络基础设施,依托人工智能、云计算、区块链等技术为代表的算力基础设施,以支撑智能机器人等新兴智能化设备或系统的应用。
在智慧图书馆环境下,开架书库的发展趋势是以用为主,以藏为辅,更加注重用户使用体验,更加智能化,需要信息基础设施作为技术应用支撑。智能机器人应用于开架书库,参与智慧书库内部业务与用户服务,对所需信息基础设施应有明确规范和标准,才能实现智能机器人在图书馆应用。然而,对有关建筑物内部信息基础设施建设的国家规范和标准还很缺乏,没有依据可以遵循。据不完全调查,只有一些地方性标准,如《贵州省建筑物信息基础设施建筑规范(DBJ52_T097-2019)》《黑龙江省建筑物信息基础设施建设标准DB23/T 2746-2020》等。从行业层面看,在图书馆行业内部,虽然一些新建馆舍(如江西省图书馆新馆)应用了万兆光纤、WIFI、Zigbee、5G等新型信息基础设施,但每个图书馆在信息基础设施建设上千差万别,也缺乏统一的行业标准,不利于智能机器人在图书馆的标准化和规模化落地应用。
2.2.2 书架
目前,应用于图书馆开架书库的书架主要有传统书架和智能书架两种类型。由于受到成本等因素制约,应用最广泛的是传统书架。智能机器人应用于开架书库,书架对其应用也有重要影响。
(1)传统书架的影响。从全面应用RFID技术的大型馆开架书库管理来看,传统书架的图书定位、排架问题已经得到解决。将智能机器人应用于开架书库,理论上传统书架也能适应机器人机械手夹取图书动作。在实际应用中,传统书架引入智能机器人时,为了保证书本直立和方便抓取,要对每本书加装类似文件夹的装置。此种操作的难点在于图书原位归还时需重新插入,操作会有障碍,因为图书抽出后书架上的图书始终处于动态形态,有可能是过密过紧,也有可能处于过松的“倒伏”状态,即使是松紧适度,无论从生活经验还是实验,此种操作机械手原位归还图书的难度大于抽取图书。保证每本书直立,书与书之间有适当间隙,是减少人工智能机械手操作难度的关键,也是传统书架的改造方向。
(2)智能书架的影响。智能书架的主要设计目的是采用RFID技术,来改进图书馆现有在架、外借图书的统计工作,是以即时书库检查和乱架图书检查为主要功能的系统[13]。随着技术发展,未来智能书架会更加智能,不仅有3D导航、借还书、查询、图书实时上架、統计分析读者阅读习惯等功能,还具有图书推荐、在线图书预约、手机统计报表等特色功能。因此,随着RFID技术的广泛运用、随处可见的物流系统、成功运营的智能闭架管理系统和自助图书馆,智能机器人应用于智能书架在技术上已无障碍。大多数图书馆需要考虑的是有无更新必要、性价比、旧有传统书架的改造成本以及与原有管理系统融合等问题。
2.2.3 图书
图书对智能机器人应用的影响,主要体现在图书的开本大小和厚度随机性上。目前,图书馆开架书库的上架文献,其开本大小及厚薄差异大,且随机分布。图书馆馆藏中这种开本大小和厚度随机的图书,体量殊异,J类尤为显见。开本大小会影响智能书架的层高度和纵面宽度设计,开本厚度会影响智能机器人在开架书库工作时机械手的抓取动作完成。因为机器人每次接收指令后准确抓取,都需要计算和调整机械手的动作程序,精确到很小单位,才能顺利夹取图书,效率低下。
2.2.4 开架书库书架、书籍排列紧密度
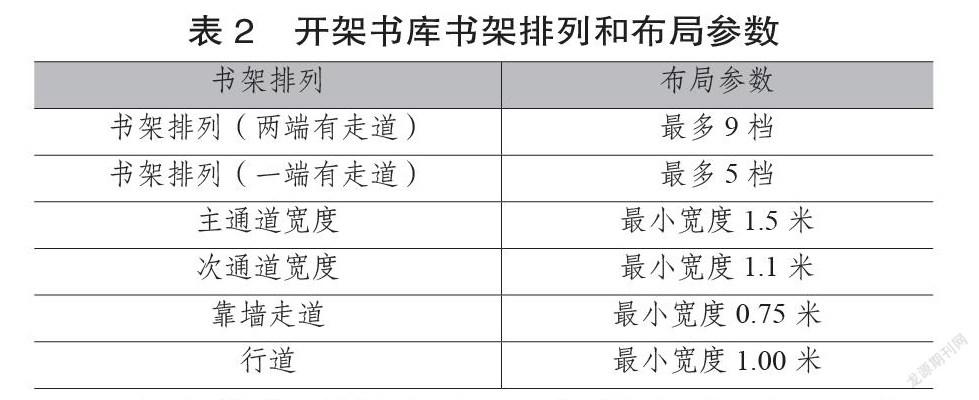
书架排列的紧密度,因开架书库藏、借、阅一体化,对整体空间要求特别高,还要符合消防要求,因此书架排列不同于密集书架。《图书馆建筑设计规范JGJ38-2015》对开架书库的书架排列空间布局作出明确规定,其书架排列具体参数见表2所示[14]。实际应用时,一般都要求开架书库书架主巷道的宽度,按照两人并行的规范宽度设计成1.2米,对于设有靠墙固定式条形座位的巷道墙边至书架也应有1.2米的距离[15]。一旦智能机器人应用于开架书库,会影响书架的排列密度。不过,在开架书库中服务的机器人体型大小是以人类为模型而设计的,因此根据因地制宜的原则,书架之间的间隔应为1~1.5米为佳。
在书籍排列紧密度上,如前所述,由于受图书开本大小及厚薄随机性影响,图书馆并没有对书籍排列紧密度作出规定。实际业务操作中,架上图书是按照某种排序标准排列,图书与图书之间间隙不一。智能机器人应用于开架书库,书籍排列紧密程度会影响机器人拾取和存放图书。排架过紧过密,会增加机械手抓取困难,过疏会引起“倒伏”现象。传统书架为防止书籍“倒伏”,常常采用书立来帮助书籍在书架上保持直立,书立起到固定作用,同时形成一个以“行”为单位的大框格,框格大小是根据书架上每层书的总宽度、排列紧密度和书籍异动等情况随时人工调节,从而形成框格化书架模式。而且,绝大多数位于街头的24小时自助图书馆,其书架就是采用这种框格化设计,用内部智能传输带完成书籍的传输,书籍的开本和厚度经过挑选,大体相同,虽然以牺牲多样性为代价,但解决了图书开本大小和厚度不一、图书“倒伏”等困扰,也适应智能化管理。因此,为实现智能机器人在开架书库应用,书架框格化是必然方向,这在技术上没有障碍,困难只是升级改造的成本以及与环境的调试融合。
2.3 人工智能技术发展
开架书库智能化是智慧图书馆建设中不可或缺的部分。智能机器人在开架书库应用,本质是人工智能技术在图书馆的一种场景应用,是智能机器人与图书馆服务协同的有益探索。有研究者指出,“依据机器智能支持程度不同,馆员和人工智能的协同由低到高可以分为4个阶段:人工智能代理、人工智能助手、人工智能馆员和人工智能伙伴。”[16]因此,人工智能技术发展对智能机器人在开架书库应用产生重大影响。
人工智能技术经过多年发展,经历了技术研究、实验应用、产品、服务等历程,在进程中发布若干标准,其中有相当一部分标准与智慧图书馆建设有密切联系(如表3所示),从基础共性标准到技术支撑层,从关键领域到产品与服务层,再到行业应用层,图书馆行业可结合本领域特点进行本地化,并提出相关建议和要求[17]。刘炜指出,图书馆属于智能技术应用层,有一些通用基础规范和关键技术规范与智慧图书馆直接相关,无需另行制定,可以遵从目前相关产业的已有标准,图书馆行业可根据应用需要进行一定的本地化,如增加必要领域术语、本地化解释以及应用案例或场景,或制订一定领域内应用指南,以指导应用实践并提供培训[18]。
智能机器人目前在图书馆开架书库中应用,受多种条件制约。某些图书馆虽然已经实现诸如ASRS的自动化立体书库、智能分捡系统、智能书架、自助借还系统等被专家们称为“弱人工智能”的智能系统,目前这些系统独立工作,缺乏连通性,还没有达到人们所期望的“强人工智能”模式。以AGV机器人分拣技术为例,自2019年始国内已有图书馆陆续将AGV机器人应用于图书分拣。有的图书馆是在原有馆舍基础上进行空间改造和重塑,有的是在新馆馆舍建设初始阶段考虑此项技术,整体规划减少制约,完善功能且对周围环境影响更少[19]。
未来的智能机器人参与开架书库管理,应该是多维度、强智能化的。柯平教授认为,2025年图书馆空间场景会达到基本智能化,到2030年会达到高度智能化,到2035年会达到真正智慧化。真正智慧化将会是空间和资源一体化,资源在空间里,空间里有资源,图书馆资源会出现一个空间资源化现象[20]。目前图书馆的空间和资源融合远没有达到智慧化,没有空间资源支撑,开架书库机器人服务无从谈起。未来在开架书库从事服务的智能机器人要同时具备语音识别、自动存取、书架扫描等功能,才能全面进入开架书库,系统连续地开展工作,既能服务于读者,又能完成书库管理,除了要当好图书上架、图书盘点等业务的人工智能代理和助手,还要充当智能馆员角色,接收读者图书搜索浏览指令,完成人机交互、图书定位、书架拾取等协同服务。
3 智能机器人开架书库运行管理策略
智能机器人应用于图书馆开架书库受到诸多因素影响。人工智能技术全面进入开架书库管理进行业务操作,存在诸多亟待解决的问题。如同一座城市,建造了庞大公共交通系统,依然存在交通系统合理高效连通、实现智慧交通“最后一公里”等问题。智能机器人介入图书馆开架书库工作,还需整体设计,联合研究;以人机兼容为原则,达到稳定有序;从小规模体验逐渐发展为全面运行,实现开架书库的智能化、智慧化,推动图书馆智慧化建设。
3.1 整体设计,联合研究
智能机器人应用于开架书库,是一项系统工程,涉及基础设施建造和空间改造等相关配套工程,需要统筹谋划,做好整体设计。在图书馆智能机器人全面入驻开架书库管理还未成熟前,不宜盲目大规模上马。有意引入人工智能进入开架书库管理的图书馆,决策层需要知识前移,谨慎决策。同时,多方联合研究,势在必行。
从现有研究团队和核心作者来看,多数缺乏直接联系,更未形成总的研究和实践团队,多数以阅读文献和相互引证的方式学习交流,形成学术共识,整体上处于各自为政的状态。同时生产厂家和应用终端之间的沟通亦少见,这一现状有待改变,引入联合应用开发机制,实现突破。联合研究可采用引入第三方的模式进行。图书馆提供应用场地和部分图书,引进智能化设备制造商,合作开发开架书库智能机器人系统并持续优化,以期达到生产厂家与应用终端自然融合,既能积累经验,又能减少盲目改造。在此运营模式下,图书馆与研究机构全程参与,实现图书馆、研究人员和智能化设备制造商同步协同,达到多方共赢。
逐步扩大智能机器人在图书馆行业的应用规模也是关键因素。经济效益是促使机器人生产厂家加大研发力度的决定性因素。图书馆对智能机器人的需求达到一定规模,才能促进图书馆机器人产业健康快速发展。家喻户晓的清洁机器人是典型例子,从早期的自动规划线路,自动回充,发展到时下的自动倒垃圾,自动清洗,智能化程度越来越高,价格也逐渐趋于合理,人们对其接受度也逐渐走高。图书馆服务机器人从有条件的省级馆开始使用,再向市级馆延伸,如果这个市场培育起来,足以给现有图书馆机器人发展注入新动力。
3.2 人机兼容,稳定有序
“纵观人工智能在图书馆应用的发展趋势,人机共存、人机交互将成为未来图书馆服务的新态势。”[21]人机兼容是智能机器人管理开架书库的总体原则。建立合理、友好的人机共存环境和交互界面是今后的研究方向。
进行开架书库智能管理,可借鉴人工智能在其他场景的应用,如自助图书馆、闭架书库管理、物流货架、集装箱技术等。后者全智能化的实施难度小于开架书库,其硬件设施、运行机制等,可以移植于人工智能开架书库管理。开架书库智能管理是将闭架管理内部智能系统外化,其定位方法、排架方法、书架秩序稳定性等方面与闭架书库的要求一致,不同的是闭架系统使用传输带,而开架系统呈开放状态,需用到机器人自动存取动作,需要硬件支撑并兼顾搜索者不同搜索习惯。无论是闭架系统、物流转运、无人商超、集装箱系统,物品排列稳定有序是必然要求,这一点同样适用于人工智能开架书库管理。笔者在前期研究成果中提出一种能与人工智能耦合的开架书库排架与定位方法,以“列”为阈值管理单位,能与闭架书库管理和多种排架方法兼容[11]40-41,此种方法在人工智能开架书库管理中可深化应用。
3.3 设立小规模智能开架书库体验区
目前,在全国范围内还没有完全意义的智能开架书库,只有少数大型馆实现部分功能应用,如智能分拣、智能盘点等。要实现全面智能化,开架书库需要进行全面改造升级,现阶段可借鉴经验不多,为降低成本,可进行小规模试验,待技术成熟,标准形成后,逐步推广。
实验先行的合理性和必然性,从人工智能技术基础RFID系统的推广应用过程得到印证。笔者通过现场走访、远程访问、文献阅读等方式了解到,并非所有图书馆都适合采用RFID技术手段,图书馆大小规模不同、同一图书馆因其服务区功能不同等因素,都会影响此技术手段性价比,甚至有图书馆采用RFID系统后又弃用[22]。
实验操作可参照国家图书馆的数字体验区经验[23],或在新建的城市书房中开展小型试点。随着近年来阅读推广活动纵深发展,很多图书馆致力于打造15分钟阅读圈,24小时不打烊,无人值守城市书房。这些城市书房的面积大多在150~300平方米,规模小,但功能齐全,从基本的书目检索到图书借还,还兼有阅览和休闲功能,其功能类似于图书馆开架阅览书库,配备先进的门禁系统、智能控制设备,具备开架书库智能机器人应用基本条件。图书馆可以联合智能机器人研发廠家,共同开展智能机器人服务试点。图书馆智能机器人开架书库管理规模可大可小,此种管理方式相当于N(>1)个24小时自助图书馆的拼接,不同之处在于要将人工智能技术内化管理转变为外化管理。
4 总结与展望
在未来社会,人工智能会渗透到生产生活方方面面,人工智能在图书馆应用,只是其中很小一部分,现有障碍和困难随着技术进步都会得到解决。图书馆智慧服务是大势所趋,图书馆界只有以开放心态,积极参与其中,才会在未来图书馆事业发展中拥有话语权。
智能机器人进入图书馆代替人类,从事某些工作也是大势所趋,是图书馆事业的发展方向。在未来,智能机器人会成为馆员工作伙伴,现有图书馆人员结构,业务流程等都会在智慧化环境下重构,图书馆要积极融合到大趋势中,加大智能化建设研究和投入。只有图书馆有智能化设备需求,机器人研发生产厂家的投入才能产生经济效益和社会效益,促进他们加快研发速度,向图书馆提供更智能的机器人。图书馆在使用机器人过程中发现问题,并及时反馈给研发者和生产者,可以帮助他们改进设计中不合理部分。研究、生产团队和终端用户间的多向正反馈,是促进人工智能在图书馆理性应用的必然选择。人工智能研究,包括语音识别、图像识别、语义分析、位置定位等都是非常关键的技术,极具应用价值[24]。图书馆作为公益性服务单位,在这些方面没有技术和人才优势,唯有合作,开展行业间的联合(如图书馆联盟数据共享)和多行业的跨界合作(如机器人),才能匹配未来智慧图书馆的发展要求。
参考文献:
王晶,黄斌,陈俊华.基于PLC的图书馆作业型机器人[J].机床与液压,2005(10):160-162,192.
王展妮,张国亮.图书馆智能机器人应用研究综述[J].大学图书馆学报,2015(3):82-87.
方建军,张晔.图书馆图书自动存取机器人的研究与应用[J].图书馆建设,2012(7):79-83.
杨学睿.基于机器人的图书馆自动取书方法及技术研究[D].南京:南京师范大学,2015.
沈奎林,邵波,陈力军.基于超高频RFID的图书盘点机器人的设计和实现[J].图书馆学研究,2016(7):24-28.
夏正伟,李全,端文慧.RFID图书自动盘点智能机器人应用研究:以武汉大学图书馆为例[J].图书馆杂志,2020(1):61-66,55.
樊慧丽,邵波.国内外图书馆智能机器人的研究应用现状和思考[J].图书馆杂志,2017(6):88-94.
冯银花.基于智能机器人技术的图书馆智能仓储[J].图书馆学研究,2018(1):34-39.
杨爱华,李子霄.基于读者检索行为的开架书库排架方式实证研究[J].图书馆杂志,2019(7):44-50,59.
杨爱华.智慧图书馆视野下的开架书库排架方式研究:基于第六次全国公共图书馆省级馆开架书库排架方式评估标准[J].农业图书情报学报,2020(12):87-96.
杨爱华.智慧图书馆视域下大型馆开架书库管理研究与策划[J].图书馆学研究,2021(1):37-42.
单轸,邵波.国内图书馆空间形态演化探析[J].图书馆学研究,2018(2):20-26.
韩亮,郎筠.基于RFID图书馆智能书架设计实例[J].现代情报,2013(11):142-146.
中华人民共和国住房和城乡建设部.图书馆建筑设计规范 JGJ38-2015[S].北京:中国建筑工业出版社,2015.
許建勋,胡浩平,开架书库重新布局新探[J].高校图书馆工作,2002(2):52-54,71.
孟海红.图书馆员和人工智能协同发展路径探究[J].图书馆工作与研究,2020(4):56-62.
中国电子技术标准化研究院.人工智能标准化白皮书[EB/OL].[2021-07-19].http://www.cesi.cn/images/editor/20210719/20210719180918587.pdf.
刘炜,刘圣婴.智慧图书馆标准规范体系框架初探[J].图书馆建设,2018(4):91-95.
蒋雯笑.AGV机器人分拣技术在图书馆的应用探析[J].图书馆研究与工作,2021(3):68-72.
柯平.图书馆未来2035与“十四五”规划编制[J].图书馆杂志,2020(10):13-17.
王璇,王晓文,沈思.国内外人工智能与图书馆研究的知识网络及演化态势分析[J].大学图书情报学刊,2019(5):77-82.
宋岩.RFID技术在高校图书馆应用反思[J].图书馆杂志,2016(8):76-81.
申悦.人工智能机器人在图书馆的设计与实现:以国家图书馆数字图书馆体验区为例[J].图书馆,2020(6):37-41.
常青,杨武健,龚景兴.智慧图书馆建设误区与建设策略[J].图书情报工作,2018(19):13-18.
王义翠 湖北省图书馆副研究馆员。 湖北武汉,430071。
杨爱华 湖北省图书馆副研究馆员。 湖北武汉,430071。
(收稿日期:2021-06-14 编校:谢艳秋,曹晓文)