基于IoT的医疗设备管理系统
2022-07-12吴风浪
吴风浪
(西安交通大学, 医学院第一附属医院, 陕西, 西安 710000)
0 引言
随着物联网的发展,传统行业也到处可以看到物联网的身影[1-2]。由于近些年来医疗改革以及相关经济的原因,迫使医院急需进行结构优化和降低成本。因此,医院需要提高患者吞吐量,提高操作性能,减少冗余环节,削减不必要的人力资源。在医院内的各种复杂流程中,空间感知服务有助于提高护理质量和降低成本[3-5]。目前通过引入物联网,搭建相关的物联网平台,可以实现对医院中的床位,病人,药品以及设备,进行实时跟踪,管理以及逻辑分析。从而提高了流程利用率和员工生产效率,提高了物流的透明度,减少了库存和过度购买,减少了搜索时间,并确保正确的患者可以使用正确的流程[6-8]。
但医院特殊的环境和运行条件对物联网平台系统的发展提出了很高的要求。这是因为医院是非常敏感的工作场所,因此必须确保部署的系统不会对关键医疗设备或特殊治疗指定区域造成干扰,然而目前现有的应用情况对于医院内部的设备或人员的位置跟踪精确度较差,并且系统缺乏稳定性[9]。为了解决以上问题,本文利用无源被动的RFID技术[10-13],提出了一种对医院内中移动物体的位置和方向定位和跟踪的方法,实现了对医疗器械,设备的实时定位和管理。
1 背景描述
图1显示了一个典型的医院环境。从图可知,这个环境包括病房、医疗设备存储室、IT室和管理人员,他们控制个人、患者和设备的工作流程。

图1 医院内部环境示意图
当有病人因事故被送到医院时,需要对病人进行急救,因此就需要轮椅,氧气面罩,心脏泵等专业设备,同时也需要空置的病床。设备管理人员需要根据设备管理系统快速检查所需设备的位置和可用性。使用设备管理系统,管理员可以通过系统查询,并在瞬间获得该设备的位置和状态。同样的情况也适用于轮椅和床位。如图1所示,空闲床位共有3张,轮椅1辆,2个心脏泵和1个监测装置。
2 系统原理
2.1 系统设置
在提出的方法中,要求将RFID标签集成到放置移动对象的网格中的地板中,如图2所示,地板由尺寸相等的N×M块板组成,使得N,M≥1。在每个地板上,RFID标签贴在位置(X,Y)上,使得X,Y≥1。每个标记都放置在特定地板内固定预设位置上。
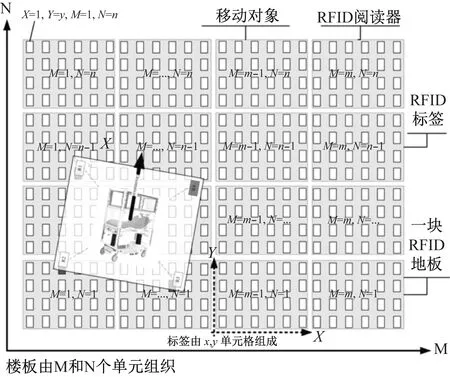
图2 以病床为例,可扩展RFID地板部署示意图
在图2中,坐标X和Y对应于地板的行和列。标记存储了分别表示板中水平行和垂直列的整数值x和y。该标记还存储水平行变量m和垂直列变量n,它们对应于板在房间尺寸中的位置。必须指出的是,每个地板上的RFID标签的分布不必相同。然而,重要的是,如图2所示,存储在每个标签中的位置信息参考与网格设计相关的变量x和y。在该设计中,如果需要更改标签分布(例如,地板中的RFID标签较少),则可以通过按需跳过行或列来完成操作,但不更改RFID标签在地板中的位置。通过这样做,可以避免更改每个RFID中存储的数据。此外,还可以控制不同楼层分区上RFID标签的密度,以达到所需的分辨率,并分别控制特定的楼层面积,以满足特定的应用需求。另外还可以扩展RFID地板,以覆盖任意大空间。
2.2 移动物体设置
在设置中,需要预先在所有移动对象上安装RFID阅读器。RFID阅读器组件通过串行接口连接到嵌入式计算机,通过串行接口根据存储的标签信息计算位置和方向信息。由于读卡器和转发器之间的距离必须很小,所以将阅读器安装在移动物体下面。
2.3 标签排列
标签的排列方式是1个阅读器只能覆盖一个标签。其主要原因是定位结果的预期分辨率和可靠性。虽然理论上每个对象有1个读卡器就足以读取1个RFID标签来计算其位置,但至少有2个阅读器需要检测2个RFID标签来计算其方向。为了更准确地测量方位,2个阅读器并不总是足够的,因为它们不一定与标签匹配。例如,如果标记的分布非常稀疏,那么在未标记区域中获取阅读器的概率很高,因此它不会接收定位数据。在每个对象上使用更多的阅读器可以提高系统的鲁棒性和测量精度。
2.4 测量步骤
总体测量步骤如下。
(1) 扫描。应答器以同步方式读出标签。标签的ID和坐标M、N、X和Y的值是有时间戳的,并作为数据元组
(2) 测量。软件模块根据数据元组M、N、X、Y、RFID标签的ID和时间戳计算对象的位置。此信息从靠近特定读卡器的RFID标签中扫描。
系统组成及通信:系统组成模块如图3所示。它们之间的相互通信是:当数据被扫描时,嵌入式计算机将测量到的信息转换成高级的“情境事件”并发送给软件模块。软件模块由情境管理代理和存储移动对象移动历史的数据库组成。在这种设置中,嵌入式计算机是使用知识查询标记语言(knowledge query markup language, KQML)的代理通信模块的一部分,KQML提供了一种基于纯文本的TCP/IP代理通信机制来与系统中的实体交互。
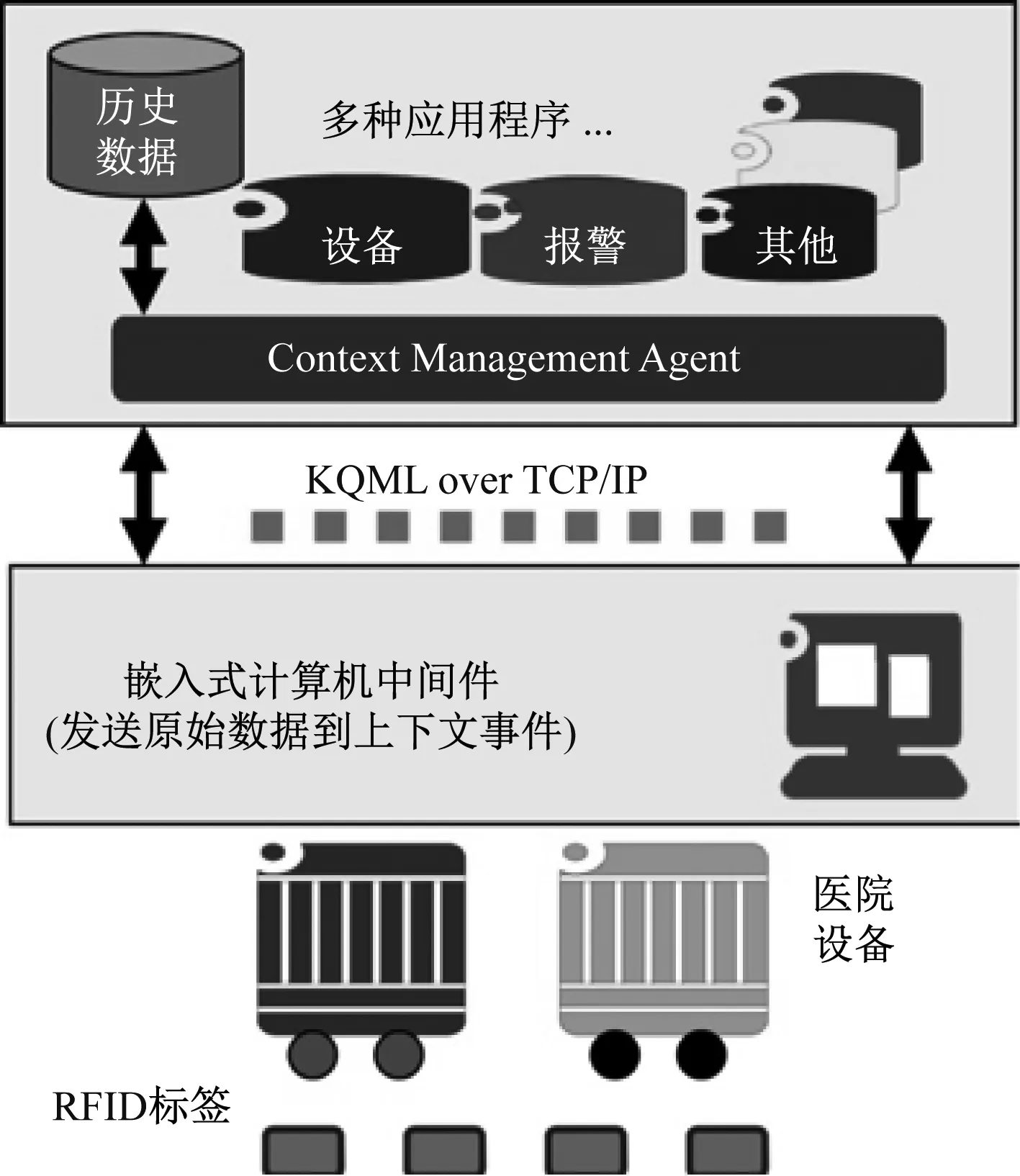
图3 RFID系统组成模块
另一种方法是使用无线串行适配器(如蓝牙、ZigBee或WiFi)将RFID阅读器输出发送到远程计算机。每个RFID阅读器都需要连接到一个无线串行适配器,该适配器与房间中的远程计算机配对。虽然这种方法只需操作无线串行设备就可以节省移动设备的能耗,但它会产生信号干扰,特别是当室内有两个或三个以上的移动对象时。也就是说,12个无线串行适配器将使用同一台远程计算机在同一个房间中运行,很可能相互干扰。
3 定位方法
在获取了相应数据以后,为了计算特定读取器扫描的标签的位置,可以通过式(1)、式(2)计算得到其位置:

(1)

(2)
注意m、n、x和y都是大于0的数字。表1描述了式(1)、式(2)中的符号。

表1 符号释义
对于可以扫描标签的情况,P的x和y分量的值是不确定的。上述方程表明,用2个位置点可以确定物体的位置和方向。然而,为了提高系统的鲁棒性,在此使用了4个阅读器。如果1个或2个阅读器出现故障,系统仍然可以有效地计算出移动对象的位置和方向。
移动物体的位置由中心点p0确定,如图4所示。从移动物体的高度可以很容易地计算出三维位置的z分量。移动对象的方向仅围绕z轴(偏移)变化。通过建立n个识别阅读器位置的矢量平均值来计算中心点p0,具体如式(3)。
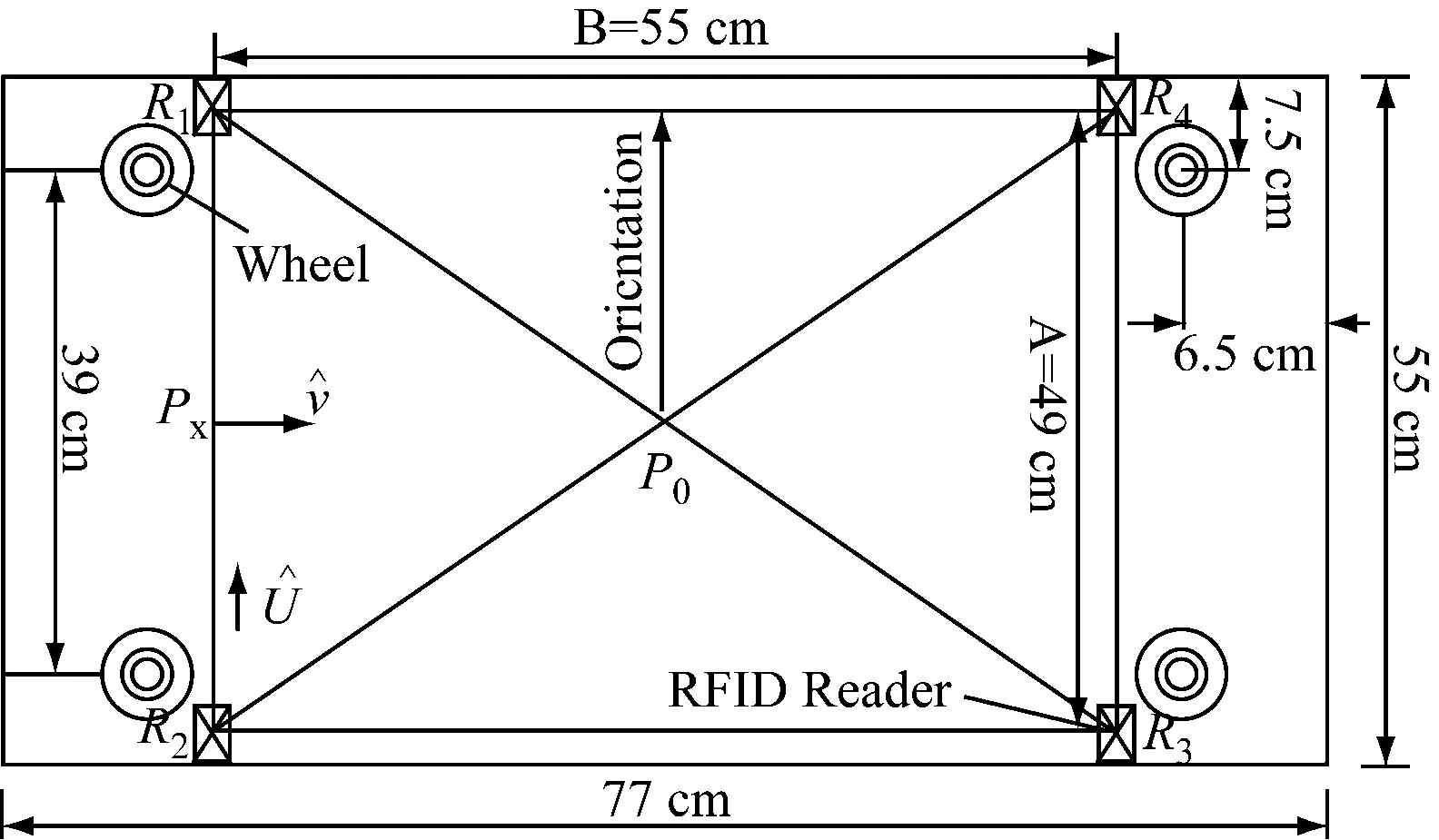
图4 已安装的RFID阅读器的移动物体的尺寸示意图
(3)
其中,i={1,…,n}使得1≤n≤4,P0是移动对象的中间点,Ri表示从阅读器接收的向量(点)。然而,如果移动对象的大小和尺寸是已知的,则如图4所示,可以通过使用对象的长度或其对角线仅使用两点来计算位置。为了说明这一点,考虑以下情况R1和R3已知,则可使用式(4)计算移动对象的位置:
(4)
如果R2和R4已知,则位置为直线R2R4的中心点,该中心点使用式(5)计算:
(5)

有了这个新的单位向量,可以通过将它乘以物体一半的边并将其添加到Px中来获得物体的位置。使用R1和R3,可以利用公式(6)计算P0:

(6)
在这里Φ=90°。使用R1和R3时,必须使用A而不是B,旋转角度Φ将为-90°。对于图4所示的示例,B的长度为55 cm,A的长度为49 cm。方向被视为从移动对象到对象的边界框的用户定义侧的中心的标准化正交向量。(R1-R2)或(R3-R4)之间的单位向量是移动对象的方向o,具体可以通过式(7)计算得到
(7)

示例:考虑图2所示的布局,并假设检测到阅读器R1,R2和R3(标记为红色),并且从这些阅读器收集的数据如下:
R1读数为 (m,n,x,y)=(1,3,4,1)
R2读数为 (m,n,x,y)=(1,1,3,4)
R3读数为 (m,n,x,y)=(2,1,4,3)。
应用公式(1)和(2),我们得到R1

然后,对于R1P1=(49.25 cm,122.75 cm)。类似地,阅读器R2和R3的位置将计算出来,并在下面显示。对于R2,P2=(34.25 cm,38.75 cm),对于R3,P2=(109.25 cm,26.75 cm)。应用式(3),得到

图3中的物体的方向是根据从阅读器R1和R2根据式(7)的读数计算的,如下所示:

上面例子显示了如何根据地板本身的坐标计算移动对象的位置和方向。但是,如果地板的布局方式与集成地板的房间不共享同一坐标,则必须将位置矢量转换为与房间坐标对齐,以获得最终位置和方向。在这种情况下,需要考虑两个附加向量才能映射到房间的坐标系。一个向量指向局部坐标系的原点,而另一个向量则是N轴的单位方向向量,如图2所示。另一种方法是排列RFID地砖,使其与房间的确切尺寸一致。在这种配置中,可以直接根据房间坐标读出绝对位置,而不是根据板块的局部坐标。
4 实验与结果
4.1 实验环境
如图5所示,使用一个金属支架来模拟一张病床,并配备了RFID阅读器。对于地板,我们使用商用地毯板,面积为2.88 m2,分为两排四列。每块的尺寸为60 cm×60 cm。在每个标牌的背面,贴上了20个RFID标签。标签被分为五行四列,每个尺寸为8.5 cm×5.5 cm,标签之间的距离为2-10 cm。
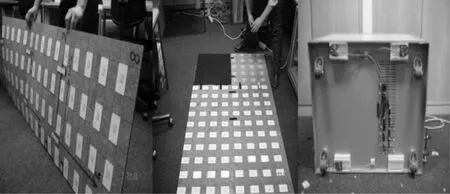
图5 实验设置,左边中间为标签部署,右边为模拟病床
4.2 实验结果
表2显示了随机选取的10个点的位置,进行P0点的静态测量的结果。从表中可以看到,平均误差为12.875 cm。其中7个点的误差在15 cm以下,说明在大部分位置,提出的方法具有较好的精度。

表2 静态测量结果对比
在第二轮测试中,重点进行了移动测试,移动物体经过10个位置。实验结果如图6所示。
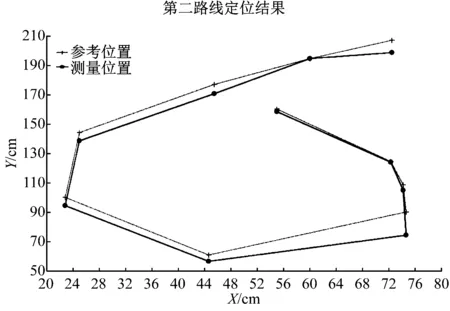
图6 路线结果对比图
在10个位置中的8个,我们可以找到3个轮子。在另外2个位置,我们可以找到2个轮子。相对于参考点的平均误差为6.38 cm,标准偏差为4.39 cm。欧氏定位误差测量点与参考点在10个位置上的差的绝对值分别为9.02 cm,5.75 cm,6.54 cm,7.02 cm,8.51 cm,4.44 cm,16.24 cm,3.83 cm,0.60 cm和1.84 cm。结果表明,使用四个阅读器时,测量误差在0.60~16.24 cm之间,平均误差为6.37 cm。
在图7中,展示了方位角的测量。平均定向误差为0.21rad(12.17°),标准偏差为0.18rad(9.52°)。10个试验位置的测量角度和参考角度之间的差异为0.18、0.01、0.19、0.14、0.35、0.19、0.57、0.12、0.001和0.38rad。结果表明,该方法定位精度高。

图7 方位角测量结果对比
在整个实验过程中,注意到由于标签的平行排列和标签的低传输范围(约8 cm),有时很难检测和读出标签。尤其是当车轮在非聚集区域(即两行之间)移动时。为了避免这种情况,可以重新排列标签位置,使用棋盘布局,然后进行广泛的基准测试。
5 总结
基于医院的需求和物联网的发展,本文提出了一个基于物联网医疗设备管理系统,致力于简化设备管理和调用流程,缩短时间。该方法主要是基于被动式无源RFID标签,通果部署标签在地板上,以及在设备上安放数个阅读器,实现对医疗设备的位置定位。与现有的方法相比,该方法具有计算过程简单,易部署等特点。其次,提出的方法中的平均误差、精度和精度不受环境几何和大小、移动对象的数量和分布等参数的影响,也不受信号传播问题(如反射或吸收)的影响。误差较小。