网络控制系统在辅机系统改造中的设计与实现
2022-07-10李康宁胡跃明刘德忠周建明王晓飞于占平孟祥忠
韩 翰,李康宁,胡跃明,刘德忠,周建明,王晓飞,于占平,孟祥忠
(中国原子能科学研究院,北京 102413)
中国原子能科学研究院串列加速器已经安全稳定运行了30多年,辅机系统是保障串列加速器正常运行不可或缺的部分之一,辅机系统由SF6处理系统、循环水冷却系统、空气压缩系统、去离子水冷却(磁铁、Q3D谱仪等)系统、排风系统等分系统组成。辅机系统改造前使用手动控制、人工操作的方法。中国原子能科学研究院为实现串列加速器自动控制,建立完善了安全互锁关系,对辅机系统进行了改造升级。
1 辅机系统简述
辅机自控系统采用集散型自控模式,主要包括设备层、管理层和控制层。PLC通过信号线数据通信与设备连接。上位机与管理计算机之间通过数据库访问,上位机与PLC之间通过TCP/IP协议进行数据交换,完成上位机的相关指令。
1.1 系统组成
改造后的辅机系统采用分布式网络构建,由串口联网服务器、上位机、网口设备、交换机和PLC控制构成,管道阀门处增加传感器,使设备功能更加完善,并建立监控管理程序,达到对水、气、液位、碰机数据的实时监控,达到对水流流速和压力显示的实时监测和对异常数据的警报及处理。软件部分分为上位机管理程序、下位机程序,同时建立数据库通过TCP/IP协议保存到局域网中,使操作者能够通过主机对监测数据进行实时保存、查询和相关操作。
1.2 实现的功能
辅机系统中的设备控制分为自动控制和手动控制,自动控制模式有现场控制、集中控制和自动控制3种控制方法。现场控制通过现场PLC终端的操作面板(如HMI)实现对设备的独立键控;集中控制由中央控制室监控主机完成对全厂所有工艺、电气设备的控制;自动控制时自控系统根据各种工艺参数检测值和状态[1],控制设备按照预定控制程序自动运行。3种控制方式可在现场PLC终端操作员面板和中控室监控主机上根据不同的优先级进行转换,以满足实际工作中调试、检修和自动运行的需要。各控制设备之间相对独立运行。现场控制PLC分站、设备控制单元出现故障时将自动退出,同时声光报警并通知上位机,不影响系统正常运行[2]。建立的自控系统包括设备层、控制层和管理层。设备层收集辅机设备的运行数据,通过上位机检测数据和仪表数据,通过TCP/IP协议将数据上传至PLC,并接受上位机相关的控制指令以实现设备的远程操控,并对各类信号进行运算处理;控制层通过局域接收辅机设备返回的相关数据信号,在收到对应信号后,向辅机设备发出相关指令信号,通过下位机辅机设备的运行信息进行收集,发送给上位机后,在上位机上自动生成对应信息与图表,并对异常数据进行报警,实现自动控制和调节并在上位机上对辅机系统设备的运行情况的实时查看以及各种数据进行绘图及表格处理等并具有报警功能;管理层包括网络数据服务器和操作员站,通过实时接收现场采集的各类数据,具备定时巡测、随机点测、分组监测等功能,根据系统需要建立各类实时数据库和历史数据库,为网络上其他节点提供相应权限级别的数据服务,并具有定时数据备份和支持多种快速数据分类[3]、查询、检索等功能。操作员站具有对辅机设备参数的设定以及对数据异常报警和处理等功能,能显示辅机系统各硬件的工作状况、各回路压力、温度、冷却水流量等信息,自动生成相关参数,以曲线图的形式提供给工作人员,极大地优化了操作人员的处理效率,完善了安全机制。
2 控制系统工作流程
控制系统采用开关、继电器的传统控制模式,经过30多年的运行,控制技术水平低下,故障率也越来越高,连锁功能已经不能满足现有的运行需要,此次改造升级重点增加了这一部分工作。更新完成后的辅机系统主要包括水交换系统、空气压缩系统、通风系统和集水坑。冷风塔热交换系统水Q3D热交换循环分路与加速器去离子水的电机与阀都设有本地/远程控制模式,其运行状态均在控制室上位机显示,并能够通过上位机进行控制。工作时,先确认循环水泵开启后才能先开水泵,再开阀门。水箱有液位计,液位低时报警,人工开阀补水,在设定时间内(上位机可设定),补水达到高液位,补水停止,若没有达到高液位,则报警管道有泄漏。Q3D与加速器交换器出口有温度传感器,若检测到出口温度超过设定温度,将开启冷冻水系统替代冷风塔热交换。去离子水出口入口端设有温度、压力、流量传感器,并在本地与上位机集中显示。冷风塔热交换相应水泵与阀门都设有本地/远程控制模式,其运行状态均在上位机显示并能够通过上位机进行控制。冷风塔热交换运行时,要先开循环水泵,到达设定时间后(上位机可设定),电阀2连锁打开;循环泵出口水温度大于设定值,打开冷却塔阀门,通过冷却塔进行冷却,回水温度高于设定值1,则冷却塔1启动;高于设定值2,则2台冷却塔同时启动。在冷风塔热交换冷却水的出口设有温度、压力传感器,在Q3D与加速器热交换器入口设有温度传感器、压力传感器和流量传感器,冷却水出口处也设有温度传感器,所有数据均在上位机集中显示。循环水泵开启后,才能开Q3D与加速器的水泵。水箱有液位计,液位低时报警,并且自动开启补水泵,在设定时间内(上位机可设定),补水达到高液位,补水停止,若没有达到高液位,则报警管道有泄漏。对于水箱液位、主管道压力和温度、Q3D热交换循环系统的相关数据及各阀门的工作情况的监测及逻辑控制构成水交换系统如图1所示。

图1 水交换系统运行过程
空气压缩系统工作流程如图2所示,其中空压机设有现场与远程启动,现场按原有流程启动,远程可以通过上位机进行手动与自动启动,自动启动时要确保冷干机与吸干机同时启动;2台空压机一用一备,2台空压机停止再启动时启动运行时间短的空压机;上位机手动启动空压机时,若冷干机、吸干机没有启动,则画面要有提示;吸干机后加装露点仪并在本地与上位机都有显示,储气罐有2个压力传感器,并在本地与上位机都有显示,压力值空压机的启动、停止在上位机画面上可以修改压力设定值,对于储气罐和冷干机压缩机主管路压力的监测和逻辑控制共同构成空气压缩系统。

图2 空气压缩系统工作流程
通风系统设有本地、远程以及控制室应急启动、停止按钮,在任何情况下可以确保通风机的启动、停止,其运行状态在控制室上位机集中显示,确保通风系统的运行。通风系统控制方面,在储气罐和冷干机压缩机主管路分别设置2个通风机P-8和P-9,由通风系统控制运行。
集水坑工作流程如图3所示。集水坑2个潜水泵设有本地/远程控制模式,所有状态在上位机集中显示并且能够在上位机进行控制。2台泵一用一备交替启动运行。集水坑的液位计设有高低液位,高于高液位,自动启动运行时间短的泵,到低液位停泵,对于潜水泵及集水坑液位的监测及逻辑控制构成集水坑系统。

图3 集水坑工作流程
3 控制系统硬件设计
在考虑以往加速器控制系统调试维护工程中的一些问题的基础上,控制系统在辅机设备硬件通讯接口选用的设备具有TCP/IP协议接口,减少了上位机与硬件间的信息传递次数,通过构建局域网,提高辅机设备通讯效率;再对辅机设备选择有隔离效果的相关硬件。辅机设备长时间运行容易受到环境变化等影响。根据辅机设备长期运行的实际需要,尽可能地选用带隔离功能的器件。下位机采用西门子PLC S7-1500进行设计,硬件配置包括1515-2PN规格CPU、CM 1543-1规格以太网模块、3块规格为IM155-5 PN的接口模块、规格为32DI-DC24V和32DQ-DC24V的数字量输入及输出各8块、规格为8AI和8AQ的模拟量输入及输出各8块等。
水交换系统和空气压缩系统采用YET温度变送器和YEP20压力变送器,这2种变送器除了实现实时监测辅机系统各管道温度、压力变化外,还将设备的控制信息发送到上位机,预防上位机操作员和现场工作人员操作失误。管道流量检测部分通过超声波流量计能够获得管道内净累积量、瞬时流速等各种数据,并带有报警功能,能设置上限和下限流量值,当所测得管道流量值不在限值内时,发送报警信号到操作员站中。数据获取方面传感器控件等就地采集数据后,将数据传输到上位机进行数据处理后,处理结果保存在数据库中。当热交换系统水泵启动后,监测Q3D热交换系统主管路压力和主管路流量,若压力流量过低于设定值则启动水泵。通过监测加速器热交换系统水箱液位,当液位低于设置下限则开启电动阀进行补水,高于设置上限则关闭电动阀停止补水。通风机在HMI可控制,主控室增加有开闭功能的实体按钮。空气压缩系统通过YEP20压力变送器监测储气罐压力,当压力低于设置下限则开启空压机,高于设置上限则关闭空压机。系统自控流程图如图4所示。由图4中可以看出,控制系统可以按照程序自动运行,根据PID控制将循环水温度保持在一定范围内。
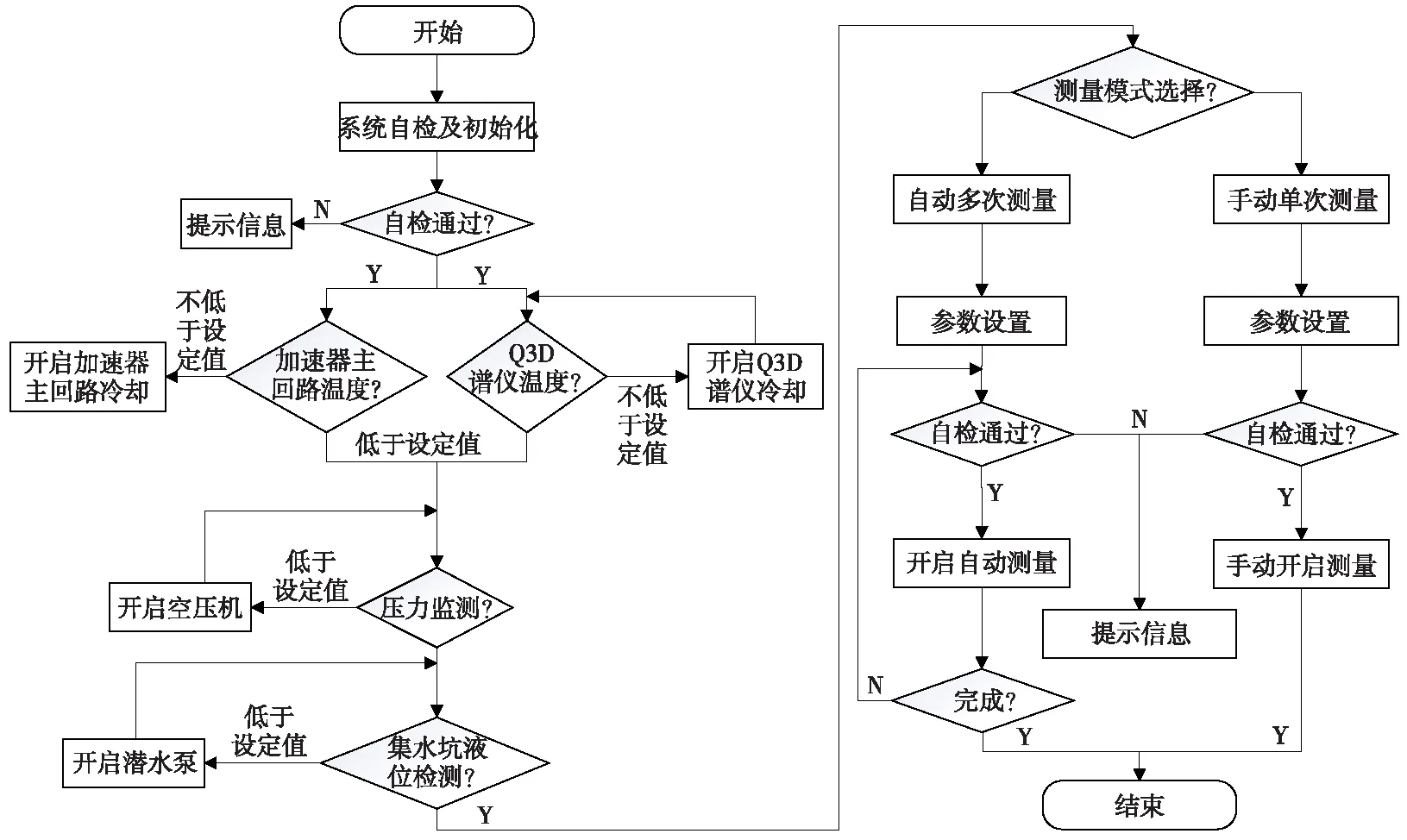
图4 系统自动控制流程
4 控制系统软件开发
辅机系统改造前采用的是开关继电器的传统控制模式,改造后软件开发分为2部分:第1部分是采用SIMATIC WinCC构建的上位机管理程序;另1部分是采用微软公司的SQL Server数据库等工具构建[4]。
4.1 上位机程序
利用SIMATIC WinCC开发上位机,其主界面如图5所示。通过上位机主控程序实现了设备互锁、辅机数据监控等功能,结果如图6所示。主控程序能实时对操作员的控制指令进行反馈,将控制信息传送到下层硬件,实现对辅机系统的控制,采用事件驱动的方式实时响应相关事件。另外,主控程序设立检测周期,能通过PLC监测系统安全运行要求高的设备的运行情况和相关数据,将获取的辅机运行数据进行存储、处理及查询,通过图表的方式方便操作员使用。

图6 辅机系统软件平台主界面相关控件功能
4.2 下位机程序
下位机程序采用西门子TIA PORTAL环境下开发的辅机系统中PLC控制柜的运行程序,采用LAD和STL编写,并通过实时采集数据上传至上位机[5-6],对上位机下达的指令信号进行处理,PLC下位机程序设计流程如图7所示。

图7 PLC下位机程序设计流程
5 系统增强安全及抗干扰设计
5.1 增强系统安全性的措施
专门编制了系统操作规程。再好的设计如果没有好的规章制度约束,安全性也得不到保证,因此,针对操作人员实行严格的岗前培训。另外,在控制系统的研发过程中,将联锁报警信号分为不同的等级,如将温度、压力等的联锁设为红色级别;将配套电源以及数据获取等对安全性影响不大的故障报警设为黄色级别。出现报警信号,除了在主控设备进行报警显示外,红色报警需要立即停止相关设备,黄色报警在相关专业人员排除故障后方可正常运行[7]。
温度、压力联锁:由于辅机设备运行时对温度、压力有要求,如果温度或压力变化波动过大会对设备的安全产生影响。当温度变送器和压力变送器监测到管道内压力、温度值异常或变化量过大时,则会自动关闭管道进口处电磁阀并发出报警信号。
5.2 辅机抗干扰设计
抗干扰对辅机运行至关重要。串列辅机系统具有复杂的运行环境,对系统要求有抗干扰的能力,不仅具有较高的安全性要求,且对系统抗干扰能力带来挑战[8-9]。系统中通过供电、硬件和软件等多个方面进行了抗干扰功能的设计,大大提高了系统的抗干扰能力。
(1)供电抗干扰设计:控制系统在布线时,供电用线缆与测控用线缆分开,避免相互干扰。
(2)硬件抗干扰设计:在硬件的选择上,使用具有屏蔽功能的相关硬件,虽然会增加一部分成本,但是对辅机系统的运行有重要作用。在对辅机系统硬件进行线路改造时,对每个相关硬件设施使用单独线路通道,避免电信号干扰同时做到改造后的硬件设备接地。数据监控时,对数字量控制的辅机设备如冷风塔热交换系统主管路回水段温度变送器、阀门等,通过PLC控制柜设计了单独的监测信号,在上位机发出相关指令后,等待辅机硬件设备返回相关反馈监测信号后形成闭环测控。
(3)软件抗干扰设计:当上位机对PLC控制柜发出响应指令信号后,为增加下位机抗干扰能力,增加了下位机数据保持功能。下位机运行时会将辅机设备返回的相关数据存储在固定模块中,在下位机每次执行相关指令时,该模块对下位机的输出程序进行赋值。当辅机设备出现异常停机时,上位机在重启后会自动保持先前设置的运行参数保证系统的正常运行。对于漏测的情况,如果在限定时间内能采集到数据,则不予特殊处理;反之,如果超过限定时间仍旧采集不到数据,则提示报警。其他重要监测信号的处理也类似[10]。
6 总结
辅机系统改造后采取自动控制、远程操作的方式实现了无人值守。完善了辅机设备安全互锁关系,提高了工作效率,更好地保障了串列加速器的运行,达到了预期目标,为串列加速器自动化运行控制创造有利的条件。
