基于导电织物的关节弯曲角度测量传感器*
2022-07-09周国鹏赵冉刘腾子戴厚德
周国鹏赵 冉刘腾子戴厚德*
(1.中国科学院海西研究院泉州装备制造研究所,福建 晋江 362216;2.中北大学,山西 太原 030000;3.中原工学院,河南 郑州 450007)
人体关节运动角度的测量对于医疗康复训练、生理信号检测具有重要意义[1-2]。 传统测量方法所用的传感器主要基于刚性的硅基材料,其硬、脆、不可拉伸的特性[3],造成生物相容性及穿戴舒适度差,导致在人体关节上提取生理信号的效率受到约束。 因此具备可穿戴、可拉伸性、轻便便携、不影响关节运动等特性对柔性传感器来说是必要的。
目前,柔性的压电式[4]、电阻式[5]、电容式[6-7]应变传感器均已用于关节角度的监测。 其中,柔性电容式应变传感器因其高线性度、低迟滞特性、低功耗等特点而受到越来越多的关注。 李仁爱等人[8]制作了基于电容式的高透明、可拉伸水凝胶应变传感器,用于手指弯曲形变的监测,展现出较好的循环稳定性;李雷鸣等人[9]报道了基于炭黑/硅橡胶复合材料的拉伸检测单元,用于机器人柔性皮肤关节等部位的弯曲检测,最大拉伸率达30%,但其拉伸应变与电阻变化率是非线性关系;李思明等人[10]报道了基于多壁碳纳米管的应变传感带,应用于肘关节的弯曲检测,但以上应变传感器均未给出相关的弯曲角度模型。 Woo 等人[11]基于碳纳米管(CNT)薄膜和PDMS,制备了可检测50%应变的电容式应变传感器,将其安装于手指上,展现出高线性度与高稳定性,但其应变灵敏度因素(Gange Factor,GF)并不高(GF =0.5);Yao 团队[12]研制了由银纳米线(AgNW)和Ecoflex 构成的电容式拉伸传感器,其应变可达50%,GF 为0.7,文中将其贴附在大拇指与膝关节上,展示了关节弯曲时电容的变化,但并未给出弯曲角度与电容变化率的关系;Cohen 等人[13]基于碳纳米管与硅橡胶,通过等离子刻蚀技术将碳纳米管以叉指电极的形式贴附于介电层,制备了电容式应变计,具有高弹性、高稳定性,GF 达0.99,并将其安装在机械手的连杆结构中用于旋转角度的测量,但其加工工艺过于复杂。
人体关节在拉伸与收缩的运动过程,应变传感器最大产生44.6%~55%应变[12,14-16],属于中等程度应变。 因此在关节弯曲测量过程中,应变传感器在中低应变区的性能表现对测量起着重要作用。 而大部分的柔性电容式应变传感器研究,受限于平行板电容本身结构的限制,在中低应变区应变灵敏度因素并不佳(GF 理论值为1[17]),且没有定量给出关节弯曲角度的预测模型[18-21]。
为提高电容式应变传感器在中低应变区的应变灵敏度因素(GF 值),本文基于无机硅胶和柔性导电布,进行分段式结构设计,利用模具与涂覆制作工艺,制备了基于导电织物的柔性电容式应变传感器,并将其安装在手套上,进行手指关节弯曲角度的测量。 与同类传感器的应变灵敏度因素进行对比分析,证实了本文设计的分段式应变传感器在中低应变区有所提升(实验中GF 最大值为1.5)。 推导关节弯曲角度预测模型,当关节弯曲时,传感器因发生应变而产生电容值的变化,根据角度与电容变化率的数学模型,可对角度进行预测,可在上位机对关节运动进行实时跟踪。
1 分段式柔性电容传感器设计
1.1 分段式电容结构
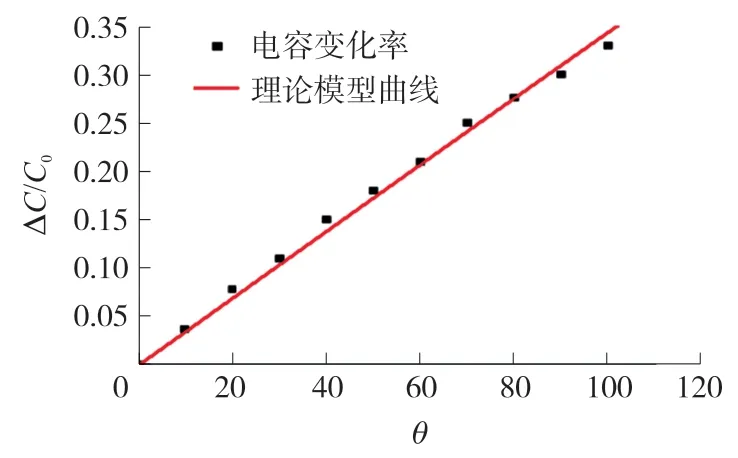
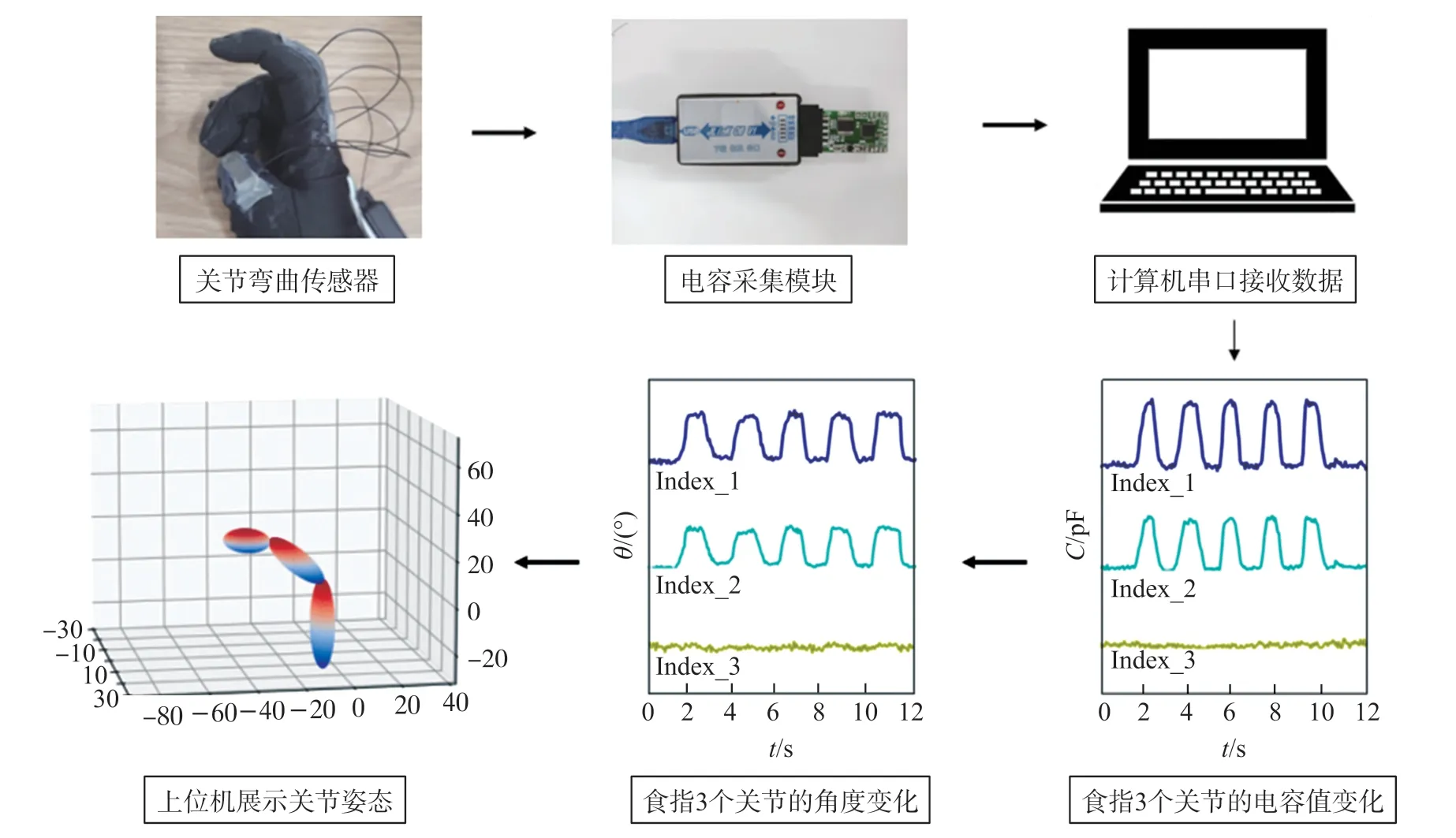
本文所提出的分段式电容结构如图1(a)所示,图中,传感器a 为用弹性模量为1 MPa 与5 MPa 的无机硅胶做介电层的分段式设计;传感器b 与传感器c 为无结构设计,分别为只用弹模1 MPa/5 MPa的无极硅胶做介电层。 假设传感器为单位长度,将介电层设计为3 段,中间段使用弹性模量(简称弹模)为E1的无机硅胶,长度为(n-2)/n,其中n为比率因子,表示单位长度的传感器中,不同弹性模量的硅胶占比长度。;两边使用弹性模量为E2的无机硅胶(E1 图1 3 种结构的传感器在拉伸受力后的厚度变化 设中间段无机硅胶(弹性模量E1)区域产生的应变为ε1,设两边弹性模量为E2的无机硅胶区域产生的应变为ε2,则: 假定传感器在受力拉伸后每一处的应力是相等的,则有: 由式(1)和式(2)解得: 为方便计算,假设在中小应变情况下传感器受力拉伸后,在厚度方向上变化是均一的。 则对于弹性模量为E1的中间无机硅胶区域,由材料力学知厚度方向的变化量为: 对于只用弹性模量为1MPa 或只用弹性模量为5 Mpa 的无机硅胶,其拉伸后的厚度变化量为: 由式(4)和式(5)解得,当n<2(1+E2/E1)时有Δd1>Δd2,即此时分段式设计的传感器相比于无结构设计的传感器,在相同应变情况下其厚度方向的变化量更大,从而增大了电容值的变化率。 为满足中等程度的拉伸应变,柔性可拉伸传感器常用的柔性基底材料有: 硅橡胶(Silicone rubber)、聚二甲基硅氧烷(Polydimethylsiloxane)、无机硅胶(Silica gel)、聚对苯二甲酸乙二醇(Polyethyleneterephthalate)等。 本文研究的电容式应变传感器,由于采用分段式设计,故使用不同弹性模量的无机硅胶(mSiO2·nH2O,深圳市红叶杰科技有限公司)作为介电层。 无机硅胶有不同弹性模量(1 ~ 8 MPa)可选,对应不同的应用场景,弹性模量越大,同等应变下需要更大的应力,本实验中选用E1=1 MPa,E2=5 MPa。 无机硅胶最大拉伸率为480%,固化后的使用温度为-60 ℃~250 ℃。 操作时间和固化时间均可按实际情况选择(20 min~1 h)。 电极使用导电纤维布(LessEMF,USA),由导电银纤维与尼龙组成,横向最大拉伸率为110%,纵向最大拉伸率为65%,表面电阻为1 Ω/cm2。 并使用同轴电缆作为传感器的引线,可有效避免寄生电容。 传感器制作工艺如图2 所示。 图2 分段式传感器的制作工艺 首先分别将无机硅胶的A、B 两试剂以1 ∶1 等体积充分混合3 min,确保容器的侧面和底部多次搅拌均匀,并置于真空机中搅拌10 min 以消除夹带的空气。 将混合好的不同弹性模量的无机硅胶,分别倒入尺寸为32×8×0.5(长×宽×高,mm)模具的不同区域,该模具由底板和隔板组成。 其中弹性模型为1 MPa的无机硅胶置于模具的中间区域,弹性模量为5 MPa 的无机硅胶倒置于模具的两边区域。 根据式(5) 的条件,设计模具中间区域的长度为18 mm,两边区域长度为6 mm。 之后取出模具的中间隔板,设置加热台温度为60 ℃,20 min 固化后脱模取出。 裁剪合适尺寸的导电织物,用弹性模量为1 MPa的无机硅胶作为粘合剂。 将导电布附着于无机硅胶的上下两面,用辊子反复滚平,同样置于60 ℃下固化,两面均如此。 再使用弹性模量为1 MPa的无机硅胶,制备0.1 mm 厚度的硅胶薄膜,作为电容上下电极的保护层及安装引线使用。 最后安装引线。 将同轴电缆的两条引线分别与上下层导电布电极相贴合,使用0.1 mm 厚度的硅胶薄膜粘附在上下层导电布上,同样使用弹性模量为1 MPa 的无机硅胶作为粘合剂。 注意同轴电缆与导电布的相接处不能有粘合剂,否则将导致接触不良。在60 ℃下加热20 min 即可固化。 如图3 所示即为传感器制作的实物图。 图3 分段式传感器实物图 假设传感器上下极板(导电布)的初始长度和宽度分别为L0、W0,泊松比为ve,介电层的初始厚度为d0。 将无机硅胶弹性体看作各向同性不可压缩超弹性材料,在拉伸过程中介电弹性体的体积和相对介电常数不变,则: 图4 为分段式拉伸电容传感器受拉力变形过程,传感器拉伸后长度增加为L0(1+ε),宽度减少为W0(1-veε),式(6)改写为: 图4 分段式传感器受力拉伸变形 则其受力拉伸后的厚度可写为: 拉伸后电容值变为: 由此得到电容变化率ΔC/C0与应变ε的数学关系: 将式(10)展开并忽略高次项,得: 式中:a=ν2e-4νe+1,b=2-2νe均为常数。 基于电容感知模型,推导传感器电容变化量与关节弯曲角度的关系。 以食指为例,食指的3 大关节由掌指关节、近端关节、远端关节组成,如图5(a)所示。 图5 关节弯曲简化 点O、C、D分别为近端关节、远端关节、掌指关节中枢点。 当手指完全伸直时,OC与OD在一条直线上。 分别过点O、C、D向手指表面做垂线OA、OB、CE、CG、DF、DH。 近似认为直线CO与直线EA平行,直线OD与直线BF平行,直线DF与直线DH平行。 为简化分析,将食指关节模型简化为图5(b)的物理模型,分析近端关节的弯曲角度。 假设关节处是平滑连接的,即直线EA、BF 通过弧线JAB光滑连接,则弧线JAB的长度即为关节弯曲过程中的变化长度,角度θ即为近端关节弯曲时的角度。 为计算弧线JAB的长度,将其划分为N份不同定长曲率的曲线。ri为划分任意曲线所对应的曲率半径,φi为对应的中心角(弧度),则第i份曲线所对应的长度为: 在实验中,将柔性电容拉伸传感器安装于食指近端关节处,如图6 所示。 由于传感器厚度相对于手指厚度较薄,假设手指弯曲过程中传感器不发生滑移,则应变传感器拉伸的长度变化ΔL即为弧长JAB的长度: 图6 柔性电容拉伸传感器安装于食指近端关节 结合式(11)和式(12)整理得: 将式(14)和式(15)带入式(11),得到电容变化率与关节弯曲角度的数学模型: 定义应变灵敏度因素(Gauge Factor,GF 值)为: 拉伸试验用于研究柔性传感器发生应变后,电容值相对变化率与应变的关系。 为对比测试,采用同样的工艺流程分别制作了3 种传感器:用1 MPa 和5 MPa 的无机硅胶进行多段式设计的传感器、只用弹性模量为1 MPa 的无机硅胶制作的传感器、只用弹性模量为5 MPa 的无机硅胶制作的传感器,尺寸均为32 mm×8 mm×0.5 mm(长×宽×厚)。 将制备好的3 种电容式柔性应变传感器分别夹持于拉压力试验机上(ZHIQU,ZQ-21A)。 使用高精度LCR 表(手持式电桥,Keysight,U1733C)测量传感器的电容值,LCR 的测试频率为100 Hz。 实验测试平台如图7 所示。 图7 传感器拉伸过程 分别记录各传感器的初始电容值及各应变下的电容值,测量10 次取平均值,记录传感器应变与电容变化率的关系如图8,并根据式(17)计算出应变灵敏度因素与应变的关系如图9。 图8 电容变化率与应变关系 图9 不同结构设计的传感器灵敏度因数(GF 值)对比 由图8 可知,电容变化率随着应变的增加而增加,且在中等应变条件下近似呈线性关系。 1 MPa和5 MPa 两种弹性模量的曲线基本重合,对应的传感器为分别仅采用1 MPa 的无机硅胶做介电层、仅采用5 MPa 的无机硅胶做介电层,均为无结构设计,故电容变化率的曲线重合。 对传感器采用分段式设计后(即结合采用1 MPa 与5 MPa 的无机硅胶),在相同应变下,电容变化率有了显著提升。 由此说明在相同应变下,分段式设计相比于无结构设计,在相同应变情况下提升了电容的变化率,并根据电容变化率计算出灵敏度因素(GF 值),如图9,可知在中低应变区(0~50%)应变灵敏度因素达1.5。 同时根据式(11)画出如图8 理论曲线,可知理论模型与实验结果吻合较好,证明了应变与电容变化率理论关系的正确性和一致性。 角度传感试验研究手指关节弯曲角度与电容值变化率的关系。 为测试方便,将电容式拉伸传感器安装在手套上使用。 通过LCR 表对手指关节弯曲角度传感器输出的电容信号进行采集,重复实验10 次,LCR 测量频率为100 Hz。 测试实验如图10 所示。 图10 角度传感测试实验 手指弯曲角度与电容变化率如图11 所示,式(16)的理论曲线与电容的实际变化率存在一定误差。 究其原因,主要在于传感器安装上的误差,手套与手指并非完全贴合,且手套存在一定厚度。 图11 弯曲角度与电容变化率的关系 为验证传感器实时追踪关节弯曲的情况,搭建图12 所示关节运动测量系统。 分别将柔性拉伸传感器安装在食指近端关节、远端关节、掌指关节处,采用Pcap02 电容采集模块对食指3 路信号进行数据采集,将采集的数据发送至计算机,对数据进行处理,实时显示电容值的变化,再根据式(11) 与式(16)的数学模型,搭建关节模型,在上位机上对关节弯曲角度进行实时展示。 图12 所示是食指近端关节与远端关节从0~90°弯曲5个周期的过程(弯曲过程保持掌指关节角度几乎不变)。 可知电容值与时间的变化关系图可以很好地追踪3个关节的运动过程,其中远端关节(Index_1)与近端关节(Index_2)呈现出4个周期性的波形变化,掌指关节(Index_3)的波形几乎保持不变,与实际关节的弯曲过程一致,最终3个关节的运动过程实时地在上位机中展示出。 图12 食指3个关节的弯曲过程 为验证角度测量的准确性,根据式(16)电容变化率与角度的关系,由电容变化率预测出关节角度的实时变化。 以食指近端关节弯曲过程为例,从0°弯曲到90°,再从从90°回到0°,记录模型输出的理论角度与实际测量角度的值。 当食指近端关节与远端关节分别弯曲35°、45°时,电容变化率分别为12.4%与16.2%,理论弯曲角度分别为37.5°与48.8°,与实际弯曲角度比较接近。 记录食指近端关节整个弯曲过程的数据,作出图13 所示曲线,计算得出角度相对误差的平均值为8.2%。 由此在上位机软件中画出关节的姿态,实验表明该模型可以较好地实时跟踪关节的运动角度变化。 图13 模型预测角度与实测角度 为测试传感器捕捉手指关节弯曲时不同手势的能力,在手套上安装14个电容式拉伸传感器。 实验结果表明,当做出“5、4、3、2、1、0”等不同手势时,能够实时地响应各关节的不同程度弯曲。 每个手指关节的电容变化与时间的关系如图14 所示,其中Ring_1、Ring_2、Ring_3 分别表示食指的远端关节、近端关节、掌指关节,以此类推。 可知不同关节姿态对应不同程度的电容变化值,由此可捕捉不同的关节手势。 图14 不同关节姿态对应电容值变化 本文设计了一种基于导电织物和无机硅胶的柔性电容式应变传感器,突破了应变灵敏度因素GF =1 的理论值限制,在中低应变区达到GF =1.5。 这是通过分段式设计,并且使用不同泊松比的电极材料和介电层材料实现的,在相同应变下,分段式设计相比于无结构设计,能够提升电容的变化率。 通过理论和实验的方法研究了传感器应变传感模型,证明了在中等应变区,传感器的电容变化率与应变有良好的线性度,且与理论传感模型相吻合。 推导了关节角度弯曲模型,实验表明传感器的电容变化率与关节弯曲角度有良好的线性关系,理论模型可以预测手指关节的弯曲角度,并在上位机中实时跟踪关节的运动姿态。 此外,本文制备的柔性传感器具备生物相容、可拉伸的特点,且轻便便携、不影响关节运动,制作工艺简单,成本低廉,对于医疗康复训练、生理信号检测有较好的应用前景。





1.2 分段式传感器制备方法


2 柔性传感器传感理论模型
2.1 应变感知模型







2.2 关节传感理论模型








3 柔性传感器性能测试
3.1 传感器拉伸测试



3.2 角度传感测试

3.3 关节弯曲实时测量


4 结论
