高动态GPS/BD在不同姿态下的精度标定方法
2022-07-08李鹏勃王西泉马方远
李鹏勃,王西泉,马方远,王 茜,杨 帆,鲁 娟
(中国兵器工业试验测试研究院,陕西 华阴 714200)
0 引言
GPS/BD定位技术成功应用于导弹外弹道轨迹高精度测量,既可实现弹体位置和速度实时测量,又可以通过数据处理获得高精度的弹道参数,为导弹外弹道设计、修正提供了前所未有的技术支持。由于弹体在飞行过程中处于高速运动和旋转,其姿态实时需要进行调整,不断变化,因而GPS/BD天线会随着弹体进行实时变化,天线方向的变化不但影响卫星信号的接收,甚至会带来信号的中断,导致输出的GPS/BD定位精度与弹体实际位置存在较大差异,测量获得的弹道参数精度误差无法评估。本文针对此问题,提出GPS/BD定位系统在不同姿态下的精度标定方法。
1 GPS/BD定位模块精度标定方法概述
目前对于GPS/BD定位模块的定位精度的考核方法有模拟法、转盘法、闭合差法、静态法、双天线法。模拟法的优点是对接收机可以进行较全面的考核,尤其是对接收机的动态特性可进行充分测定,它的问题主要是对动态精度的考核不够充分,这与数字模拟法相同,模型误差较大;转盘法模拟了动态测量过程,体现了GPS测量系统的实际定位方式,缺点是速度和加速度受到限制,当采用卡尔曼滤波法时,如果速度过大,目标动态模型会产生较大差异,接收机天线旋转过快,造成信噪比下降,故不能完全考核动态特性;闭合差法在测量误差已知情况下,可以较精确地测定闭合差界,利用此误差界可以有效判定观测是否出现粗差,但是在闭合差的处理过程中将丢失相关性较强的误差分量,闭合差并非多边形中各站测量误差的综合结果,它只能在一定程度上反映测量误差的大小;静态法用静态目标,不能有效考核周跳检测软件,也不能有效考核周跳检测死区及修复后残存误差带来的测量误差,因此对载波相位差分定位的动态精度并不能有效考核[1-3]。以上几种方法在考核GPS/BD定位系统的定位精度时没有充分考虑GPS/BD定位系统姿态变化时,GPS/BD定位系统的天线会随着系统自身发生变化,天线方向的变化不但影响卫星信号的接收,甚至会带来信号的中断,姿态变化导致GPS/BD定位精度存在较大差误差,无法实现GPS/BD定位系统姿态变化时定位精度的高度测评[4-6]。
2 高动态GPS/BD定位模块在不同姿态下的精度标定方法
为解决GPS/BD定位系统姿态变化时定位精度标定的难题,提出一种GPS/BD定位系统在不同姿态下的精度标定方法。该方法首先将GPS/BD基准站布设于空旷的精测测试点位,采集实际卫星星历数据,并进行实时存储;然后将采集到的原始星历数据导入进卫星信号模拟器,将高动态GPS/BD定位系统固定在转台上,卫星信号模拟器播发实际采集的星历数据,同时通过转台控制高动态GPS/BD定位系统姿态变化,实时存储高动态GPS/BD定位系统的输出数据,实验结束后,结合基准站数据和GPS/BD定位系统的输出数据进行差分处理,获得高精度的差分数据,标定GPS/BD定位系统在不同姿态下的定位精度。
2.1 模拟实验方法设计
该模拟方法通过基准站采集卫星星历数据,导入卫星信号模拟器,模拟真实卫星星历数据,高动态GPS/BD定位模块在转台的带动下,实现静态不同姿态模拟、动态不同姿态模拟、高动态不同姿态模拟试验,最后通过差分数据解算算法,标定出GPS/BD定位模块在不同姿态时的精度。
整个GPS/BD定位模块在不同姿态下的精度标定系统由高动态GPS/BD定位模块、卫星信号模拟器、基准站、转台及数据处理解算终端组成,其组成框图如图1所示。
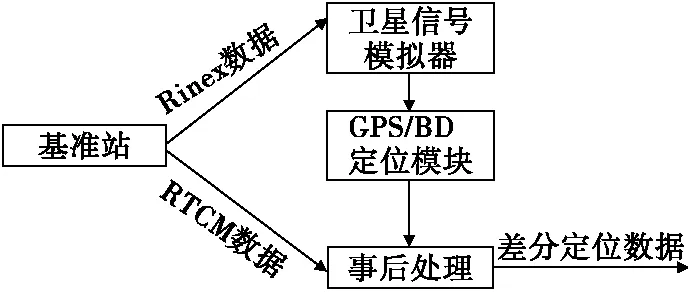
图1 系统组成框图Fig.1 System composition block diagram
2.2 高动态GPS/BD姿态精度标定实验设计
实验包括静态测试、静态俯仰动态变化、静态旋转动态变化、高动态天线静态测试、高动态俯仰动态变化、高动态旋转动态变化、飞行段天线静态测试、飞行段俯仰动态变化、飞行段旋转动态变化。
静态模拟测试时,将高动态GPS/BD模块固定于二维转台上,二维转台可实现自旋和俯仰方向姿态调整,模拟静态高动态GPS俯仰和旋转变化。
高动态模拟测试时,模拟轨迹为:起始速度为0 m/s,经过20 s加速后,加速度为5g不变,速度达到1 000 m/s;再经过20 s减速,加速度不变,速度减到0 m/s;再经过20 s,加速至1 000 m/s,经过16 s后速度减至200 m/s;以速度200 m/s绕半径5 km圆周飞行半圈;经过16 s,速度加速至1 000 m/s,经过20 s减速至0 m/s,再经过20 s加速至1 000 m/s;再经过20 s速度降至0 m/s,经过4 s后速度加速至200 m/s,以速度200 m/s绕半径5 km圆周飞行半圈;经过4 s后速度降为0 m/s,回到起始点,往复三圈。
飞行段模拟测试时,模拟实验速度为500 m/s,模拟轨迹为:起始速度为0 m/s,经过10 s加速后,速度达到500 m/s,以500 m/s速度绕半径为5 km圆周进行飞行。
2.3 高动态GPS/BD定位数据处理方法
模拟实验过程中,基准站设备通过实时输出Rinex3.04基准站数据和RTCM3.2基准站数据,基准站将Rinex3.04数据实时输出至卫星信号模拟器,RTCM3.2数据实时存储;卫星信号模拟器将实时接收到的Rinex3.04数据实时模拟真实卫星信号,高动态GPS/BD定位模块实时接收卫星信号模拟器播发的卫星信号数据,输出Binary47B-2格式数据,实时存储;实验结束后,将基准站RTCM3.2数据和高动态GPS/BD定位模块输出的Binary47B-2格式数据加载进数据处理终端中,通过联合差分解算算法,获得差分定位数据[7-8]。
为提高数据有效利用和数据处理精度,本方案拟采用联合差分方式。实验结束后,通过对原始数据进行精确分析,数据观测量不足时,采用单点定位方式作为数据分析结果;数据观测量满足伪距差分要求时,通过伪距差分方式,对原始定位数据进行伪距差分;数据观测量满足载波相位差分要求时,通过载波相位差分方式,对原始定位数据进行载波相位差分,可以获得更高精度的定位数据。载波相位差分采用最小二乘模糊度去相关调整算法,其解算步骤首先建立双差载波相位观测方程,利用最小二乘法求出未知的模糊度和基线向量的浮点解,在求出浮点解的基础上再通过使得目标函数最小来求得模糊度固定解,第三步进行Ratio检验,当满足一定的门限,认为搜索所得的固定解是可靠的[9-10]。数据处理流程如图2所示。
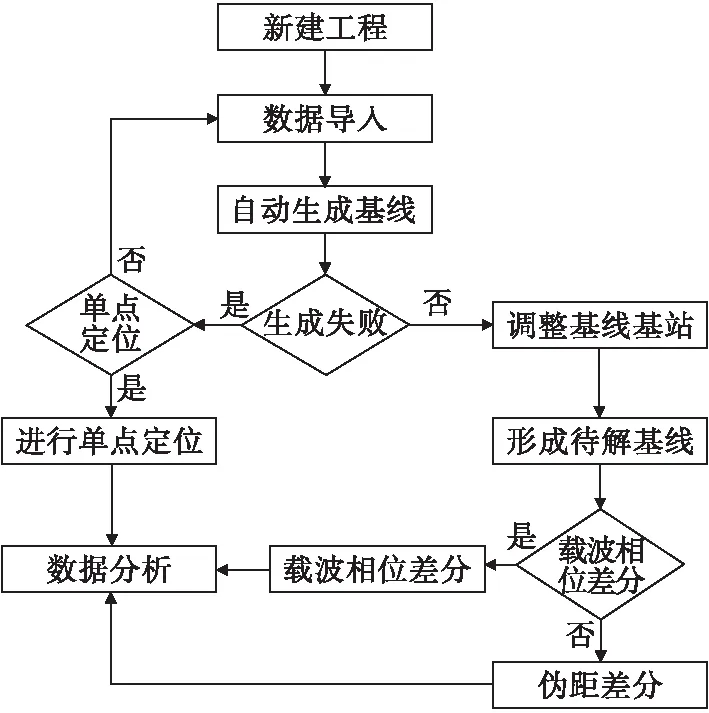
图2 数据处理流程Fig.2 Data processing flow
3 实验结果与数据分析
3.1 静态模拟实验
实验开始前,通过转台将高动态GPS/BD定位模块天线俯仰调整至和水平方向夹角为0°。静态模拟时,天线静态保持姿态不变;俯仰动态模拟时,控制转台俯仰方向每秒 10°进行变化,俯仰变化范围从0°~70°;旋转动态模拟时,控制转台旋转方向每秒10°进行变化。
通过数据分析,天线静止时,单点定位最大误差为3.7 m,差分定位最大误差为2.6 m;天线俯仰动态变化时,单点定位最大误差为4.6 m,差分定位最大误差为3.6 m;天线旋转动态变化时,单点定位最大误差为5.9 m,差分定位最大误差为4.4 m。数据处理结果如图3-图5所示。
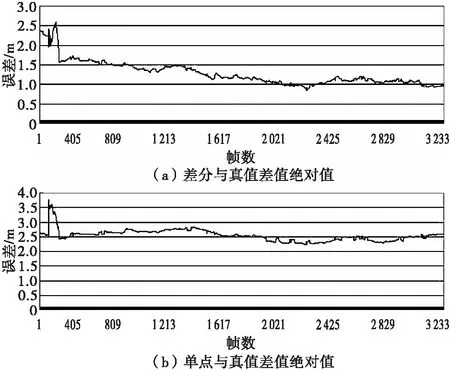
图3 静态俯仰0°时数据处理结果Fig.3 Result of data processing for static pitching of 0°
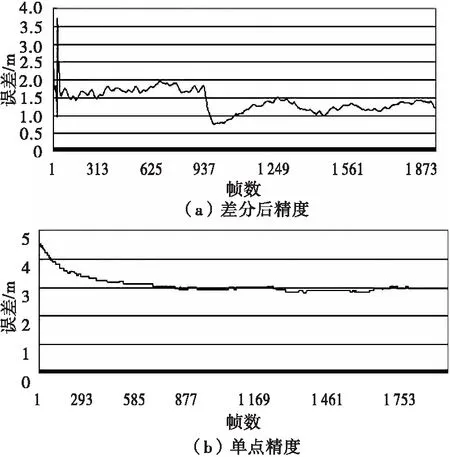
图4 静态俯仰变化时数据处理结果Fig.4 Result of data processing during static pitch change
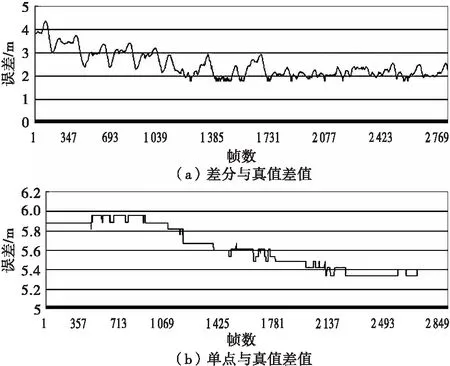
图5 静态旋转时数据处理结果Fig.5 Results of data processing during static rotation
通过对静态模拟实验数据进行分析,可以看出,天线姿态静止时,单点和后处理差分精度变化较小,当俯仰和旋转姿态随时间变化时,单点精度变化较大,后处理差分数据精度也随着发生较大变化,数据处理结果如表1。静态俯仰0°开始时误差较大,后面数据区域平稳;俯仰动态变化时,开始波动较大,从2 m左右增大到3.6 m,后面数据波动较小;旋转方向姿态变化时,波动较小。从整个数据趋势上看,有周期变化,是由于天线旋转过程中,接收到的卫星数发生较大变化,且两片天线切换接收卫星信号。
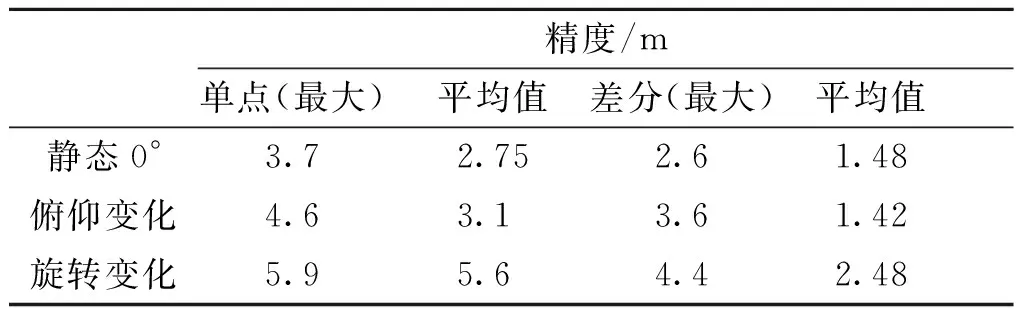
表1 静态模拟数据Tab.1 Results of static simulation data processing
3.2 高动态模拟实验
实验开始前,通过转台将高动态GPS/BD定位模块天线俯仰调整至和水平方向夹角为0°。静态模拟时,天线静态保持姿态不变;俯仰动态模拟时,控制转台俯仰方向每秒 10°进行变化,俯仰变化范围从0°~70°;旋转动态模拟时,控制转台旋转方向每秒 10°进行变化。
通过数据分析,天线静止时,单点定位最大误差为6 m,差分定位最大误差为2.5 m;天线俯仰动态变化时,单点定位最大误差为5.5 m,差分定位最大误差为3.1 m;天线旋转动态变化时,单点定位最大误差为11.2 m,差分定位最大误差为7.6 m。数据处理结果如图6—图8所示。
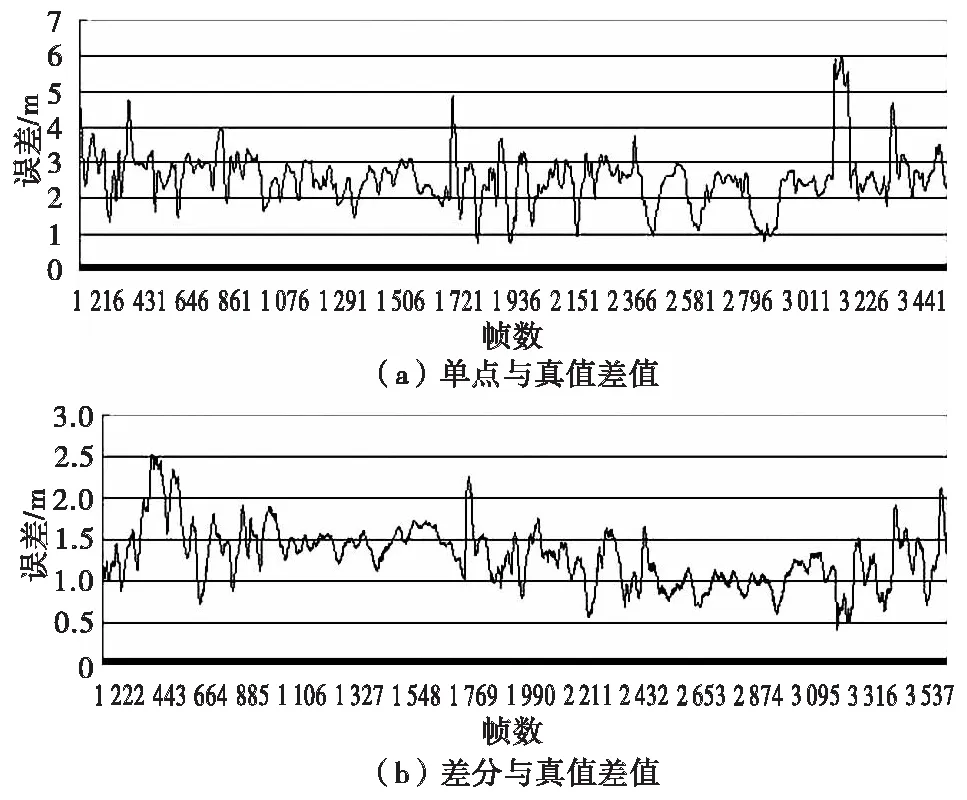
图6 高动态俯仰为0°时数据处理结果Fig.6 The result of data processing when High Dynamic Pitch is 0°
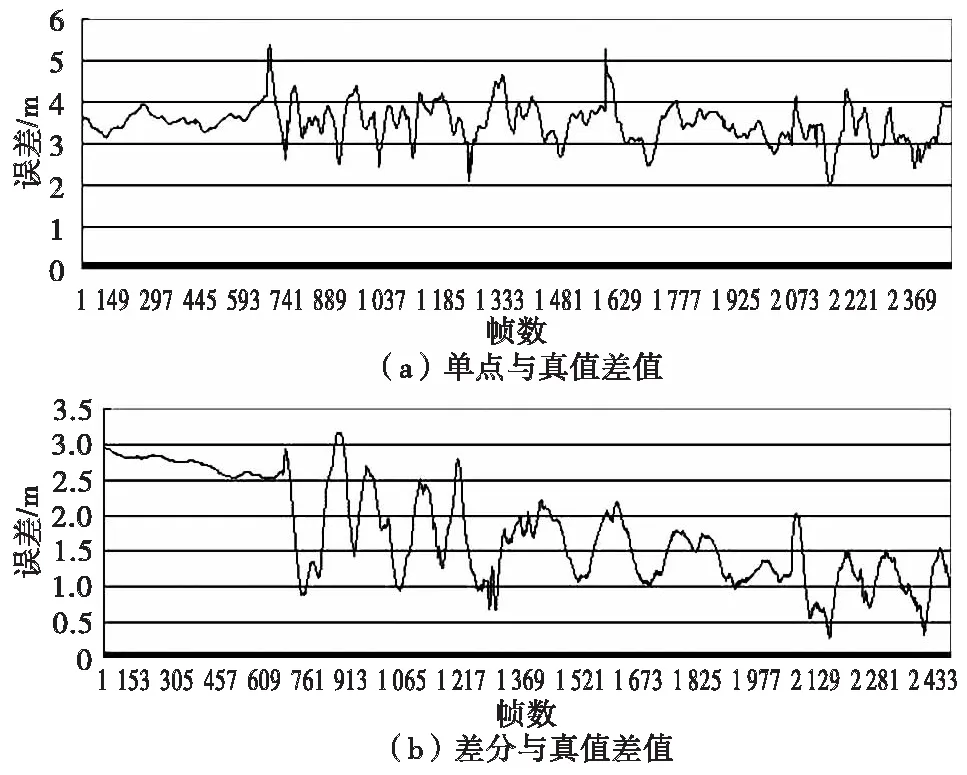
图7 高动态俯仰变化时数据处理结果Fig.7 Result of data processing during high dynamic pitch change
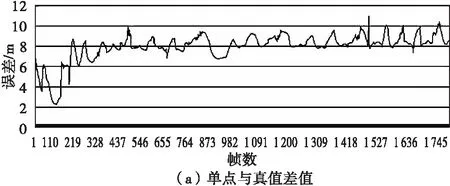
图8 高动态旋转时数据处理结果Fig.8 Result of data processing in high dynamic
通过高动态模拟实验数据分析,可以看出,天线姿态静止时,单点和后处理差分精度变化较小,当俯仰和旋转姿态随时间变化时,单点精度变化较大,后处理差分数据精度也随着发生较大变化,数据处理结果如表2。俯仰0°时数据波动范围为0.9~6 m;俯仰动态变化时定位精度从2 m左右增大到5.5 m,且呈上下来回波动趋势;旋转方向姿态变化时定位精度从2.1 m增大到11.2 m。从整个数据趋势上看,误差上下波动变化,是由于天线旋转过程中,接收到的卫星数发生变化,且两片天线切换接收卫星信号。
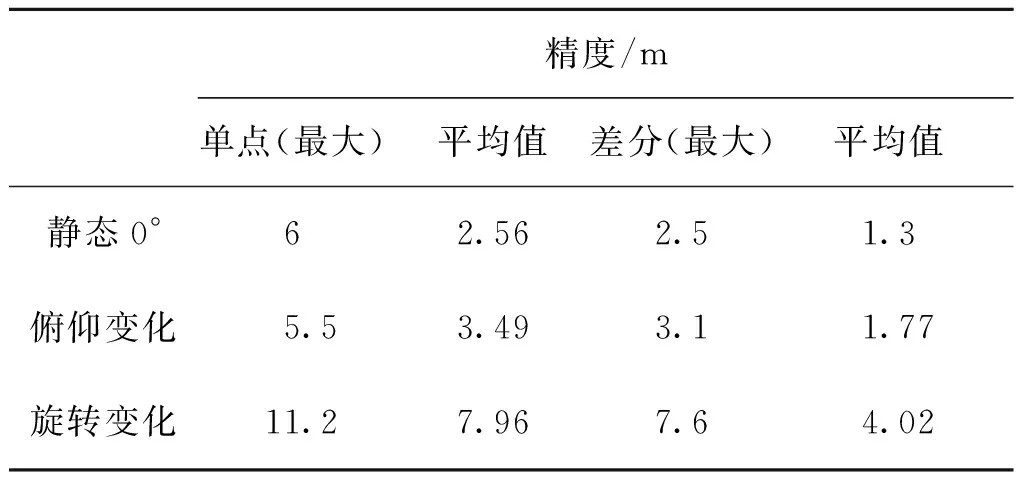
表2 高动态模拟数据Tab.2 Results of high dynamic simulation data processing
3.3 飞行段模拟实验
实验开始前,通过转台将高动态GPS/BD定位模块天线俯仰调整至和水平方向夹角为0°。静态模拟时,天线静态保持姿态不变;俯仰动态模拟时,控制转台俯仰方向每秒 10°进行变化,俯仰变化范围从0°~70°;旋转动态模拟时,控制转台旋转方向每秒 10°进行变化。
通过数据分析,天线静止时,单点定位最大误差为3.5 m,差分定位最大误差为1.8 m;天线俯仰动态变化时,单点定位最大误差为10 m,差分定位最大误差为9.1 m;天线旋转动态变化时,单点定位最大误差为9.2 m,差分定位最大误差为7.9 m。数据处理结果如图9—图11所示。
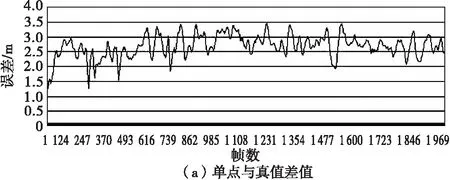
图9 飞行段俯仰为0°时数据处理结果Fig.9 The result of data processing when the pitch is 0° in flight phase
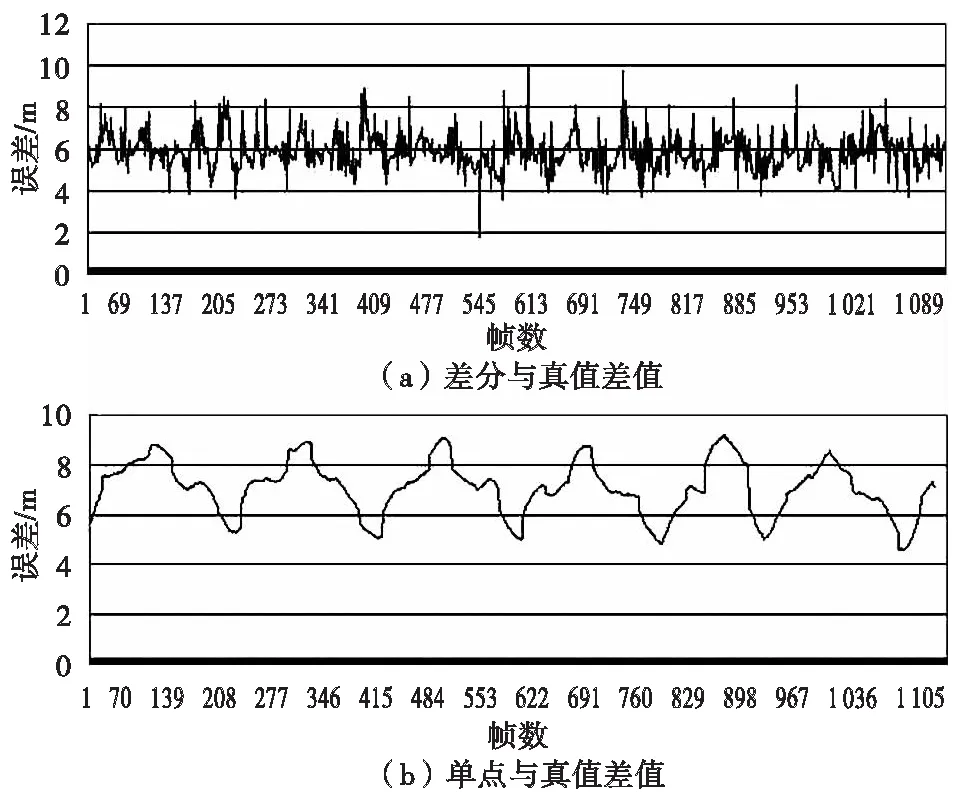
图10 飞行段俯仰变化时数据处理结果Fig.10 Result of data processing during pitch change in flight phase
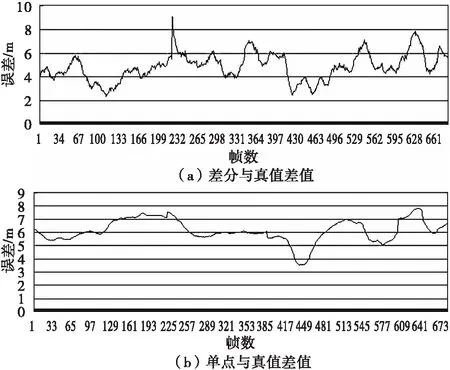
图11 飞行段旋转时数据处理结果Fig.11 Results of data processing during flight segment rotation
通过对飞行段模拟实验数据进行分析,可以看出,天线姿态静止时,单点和后处理差分精度变化较小,当俯仰和旋转姿态随时间变化时,单点精度变化较大,后处理差分数据精度也随着发生较大变化,数据处理结果如表3。俯仰0°时数据波动范围为1.3~3.5 m;俯仰动态变化时定位精度从2 m左右增大到10 m,且呈上下来回波动趋势;旋转方向姿态变化时定位精度从2.3 m增大到7.9 m。
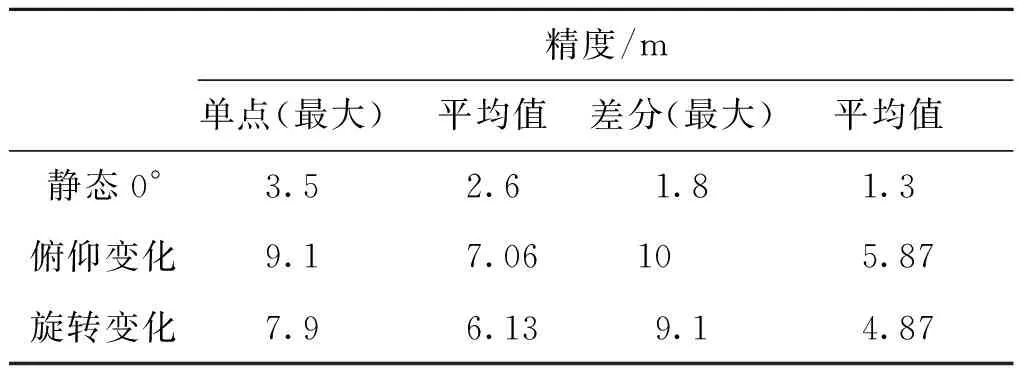
表3 飞行段模拟数据Tab.3 Results of flight segment simulation data processing
3.4 数据分析
3.4.1静态数据分析
俯仰0°静止时,稳定跟踪后,接收卫星数为18颗,GPS为9颗,北斗9颗,PDOP(位置精度强弱度)变化范围为1.3~1.37,GDOP(几何精度因子)变化范围为1.51~1.64;俯仰动态变化时,稳定跟踪后,接收GPS卫星数为8颗或9颗,北斗卫星数为9颗或10颗,PDOP变化范围为1.22~1.52,GDOP变化范围为1.41~1.8;旋转动态变化时,稳定跟踪后,接收GPS卫星数6~9颗,北斗卫星数9~12颗,PDOP变化范围为1.25~1.57,GDOP变化范围为1.5~1.87。当接收总星数不变时,GPS卫星数变少,BD星数增加时,PDOP和GDOP值会随着变大,导致定位精度误差变大。当旋转动态变化时,较静态和俯仰动态变化时,卫星数变化最大,PDOP和GDOP值变化范围也随之增大,误差最大。
3.4.2高动态模拟数据分析
俯仰0°静止时,接收卫星数为18颗,GPS为7~9颗,北斗9~11颗,PDOP(位置精度强弱度)变化范围为1.25~1.4,GDOP(几何精度因子)变化范围为1.46~1.66;俯仰动态变化时,接收卫星数为18颗,GPS为6~9颗,北斗为9~12颗,PDOP(位置精度强弱度)变化范围为1.25~1.54,GDOP(几何精度因子)变化范围为1.46~1.87;旋转动态变化时,接收卫星数为18颗,GPS为6~9颗,北斗9~12颗,PDOP(位置精度强弱度)变化范围为1.25~1.58,GDOP(几何精度因子)变化范围为1.46~1.88。当接收总星数不变时,GPS卫星数变少,BD星数增加时,PDOP和GDOP值会随着变大,导致定位精度误差变大。
3.4.3飞行段模拟数据分析
俯仰0°静止时,接收卫星数为18颗,GPS为8~9颗,北斗9~10颗,PDOP(位置精度强弱度)变化范围为1.27~1.57,GDOP(几何精度因子)变化范围为1.49~1.92;俯仰动态变化时,接收卫星数为18颗,GPS为7~9颗,北斗9~11颗,PDOP(位置精度强弱度)变化范围为1.31~1.51,GDOP(几何精度因子)变化范围为1.52~1.81;旋转动态变化时,接收卫星数为18颗,GPS为7~9颗,北斗9~11颗,PDOP(位置精度强弱度)变化范围为1.3~1.51,GDOP(几何精度因子)变化范围为1.51~1.81。
3.4.4对比分析
通过对静态、高动态、飞行段模拟数据对比可以看出,GPS接收天线姿态固定时,静态模拟测试、高动态模拟测试、飞行段模拟测试时,最大误差为6 m,GPS单点定位平均精度基本保持在2.6 m左右,变化很小;当GPS天线俯仰和旋转单一动态变化时,单点定位精度较静态时发生较大变化,误差最大时11.2 m,平均误差精度为3.1~7.96 m;当GPS天线俯仰和旋转方向同时动态变化时,单点定位精度较静态和高动态时误差继续变大,最大为26 m,平均误差精度为8.83~15.64 m。
测试过程中GPS信号和BD信号对比情况:
1) 测试过程中,发现GPS信号较BD信号稳定;
2) 姿态变化时,俯仰方向较旋转方向对定位精度影响较小;
3) 旋转和俯仰变化较大时,BD卫星丢星数较GPS丢星数多,且GPS丢星后,对信噪比影响较大,PDOP和GDOP值变化较大,GPS丢星对整个模块的精度影响较大。
4 结论
本文提出高动态GPS/BD定位系统在不同姿态下的精度标定方法,该方法利用卫星信号模拟器播发真实星历数据,转台模拟GPS/BD定位模块姿态变化,实测了高动态GPS/BD定位模块在静态、高动态、飞行段不同姿态下的精度情况,通过联合差分方法,获得了更高精度的测量值。实验后处理数据结果表明,GPS/BD定位系统在不同姿态时,定位结果与天线水平时的定位结果存在较大的差异,且通过该方法获得了高动态GPS/BD不同姿态下的定位精度。研究高动态GPS/BD在不同姿态时的精度情况,为武器系统弹道测量、地基增强站高精度应用服务提供数据支持和实践经验。