下肢康复机器人在早期脑卒中患者步态康复中的应用进展
2022-07-08张佩佩CAONing荣积峰
张佩佩,CAO Ning,陈 真, ,荣积峰
1.上海市第一康复医院康复治疗中心,上海 200090
2.MossRehab Hospital, Pennsylvania 19027, USA
3.上海市第一康复医院神经康复中心,上海 200090
脑卒中是一种危害人类健康的高发疾病,我国脑卒中现患人数高居世界首位,已成为成年居民致死和致残的首位病因[1]。脑卒中的发病率会随着年龄的增加而上升,目前全球人口老龄化不断加剧,预计2015年至2050年,全球65岁及以上人口比例将从9.1%上升至15.9%,这将导致脑卒中患者数量翻倍[2-3]。此外,脑卒中也是一种致残率较高的疾病,尽管大部分脑卒中幸存者的受损神经可以得到不同程度的修复,但仍有50%~60%的患者遗留不同程度的神经肌肉系统功能障碍[4],如偏瘫侧肌肉力量减弱、本体感觉障碍、平衡控制较差、步态异常甚至无法行走等[5],从而导致患者日常活动参与能力和生活自理能力降低,严重影响其生活质量。因此,帮助脑卒中幸存者尽早恢复独立步行能力不仅是康复医生和物理治疗师对患者进行康复治疗的主要目标[6],而且有助于评估患者能否回归家庭和社区生活。现代脑卒中康复观点倾向于重复性、任务导向的功能性训练,而下肢康复机器人即可提供这样的康复训练模式。
1 下肢康复机器人概述
下肢康复机器人是一种自动化康复训练设备,在临床康复中的应用越来越广泛。机器人康复装置基于运动再学习原理[7],让患者进行重复、密集、任务导向的运动,以促进相应功能的康复。相较于传统的在减重状态下进行的步态训练方法,下肢康复机器人一方面可以减轻康复治疗师的工作负荷,并且可同时对多个患者进行步态训练,另一方面可以帮助早期脑卒中患者进行精准、持续、系统的步态训练。此外,下肢康复机器人还可以记录患者步态康复进程的相关数据,以供康复治疗师进行客观评估和分析。
1.1 下肢康复机器人类型及功能下肢康复机器人属于自动化辅助步行训练设备,分为末端执行器式(end-effector)和外骨骼式(exoskeleton)。末端执行器式设备通过足踏板模拟步行中支撑和摆动时的运动轨迹带动患者进行下肢步行训练;外骨骼式设备可被穿戴,通过带动及控制患者膝、髋关节进行步行训练。
下肢康复机器人的功能依赖于其控制策略的实现,这是一个复杂的整合系统,其最终目的是为进行步态训练的患者提供符合人体解剖学和人体工学原则的下肢运动路径,以帮助患者更好地恢复行走功能[8]。下肢康复机器人控制策略的制订必须遵循两方面的原则:其一通过增加关节自由度为患者提供自然步态的运动轨迹[9],其二通过优化启动系统来确保人-机交互的安全性[10-11]。可根据患者的功能受损程度和康复进程为其制定康复策略[12-16]。
目前下肢康复机器人控制策略主要分为轨迹追踪(trajectory tracking control,TTC)型和需求辅助(assist-as-needed,AAN)。其中,TTC型采取健康人的步态数据作为参考轨迹用于患者的康复中。因此,应用这种控制策略时会忽略患者的步态受损程度,并且其提供的运动轨迹仅为关节在矢状面内的二维运动。ANN型应用于步态康复中仅约10年的时间,其设计理念为根据患者的步态受损程度来提供相应的步态训练支持。随着患者在步态康复进程中取得进步,ANN型的支持作用会相应下降[8]。随着各种控制算法研究的不断深入,比如力学控制算法、生物电信号控制算法、导纳控制算法等,基于ANN策略的下肢康复机器人能更好地适应患者步态受损程度并进行调整,实现个性化的步态训练。
1.2 下肢康复机器人的训练模式下肢康复机器人对步态训练的有效性主要依赖于其训练模式[17],能根据患者的步态康复进程提供不同的训练模式。目前下肢康复机器人的训练模式分为4种:被动训练模式、主被动训练模式、主动训练模式、抗阻训练模式[18]。这4种训练模式依次进阶,训练强度和难度依次增加(表1)。
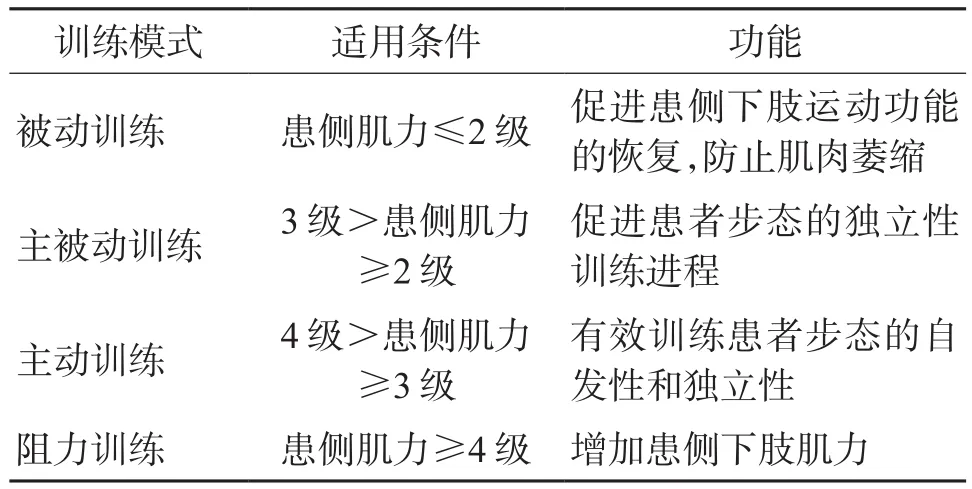
表1 下肢康复机器人主要训练模式、适用条件及功能
有研究[19-20]认为,尽管下肢康复机器人对脑卒中患者的步态功能恢复有显著的促进作用,但对于中重度步态功能受损者[中度步态功能受损:以自选步行速度(0.4~0.6 m/s)步行5 m以上;重度步态功能受损:以自选步行速度(0.1~0.4 m/s)步行5 m以上],康复治疗师引导下的地上步行训练效果与下肢康复机器人相当,甚至更好。
由此可见,脑卒中患者对下肢康复机器人步态训练模式的不同需求取决于其步态功能的受损程度,因此对脑卒中患者的步态受损程度进行精准评估有利于高效地使用下肢康复机器人步态训练的高效进行。然而,脑卒中患者的临床情况往往较复杂,如要更大限度地发挥下肢康复机器人的作用,就需要康复医学、康复工程、生物医学工程、材料学等多学科对人机交互系统的不断研究以及生物信号采集技术的发展。
2 下肢康复机器人在脑卒中患者步态训练中的作用
2.1 下肢康复机器人改善患者步行功能脑卒中患者的步态模式常具有不对称性和不稳定性[21-23],并会出现不同的代偿策略以弥补步态中的活动不足,这些都会增加脑卒中患者身体活动的能耗和跌倒风险[24],从而影响其日常活动参与能力。美国心脏协会脑卒中委员会(American Heart Association Stroke Council)认为,对脑卒中患者尽早介入强度集中、重复、任务导向的康复训练可以促进其运动和步行功能的恢复[25-26]。
下肢康复机器人在步行功能康复训练中具有主动与抗阻结合性、重复性、减重支持性、训练对称性、环境虚拟性,训练方案个性化,能进行信息反馈的特点[27],以及安全性好、不受发病时间限制、能客观进行功能评价等优点[18]。
下肢康复机器人不仅可以改善脑卒中患者的步行能力,而且对平衡控制和异常肌张力矫正有积极作用[28-29]。张熙斌等[28]的随机对照研究表示,对病程短于3个月、初始肌张力≤3级的脑卒中患者进行为期4周(6 d/周,1次/d,30 min/次)的下肢机器人辅助被动或主被动步态训练干预,干预后以改良Ashworth量表(modified Ashworth scale,MAS)评价患者的肌张力,显示其肌张力从干预前的2/3级降低到1/1+级。Cho等[29]的回顾研究显示,对平均发病时间16.1~116.2 d、处在急性或亚急性期的脑卒中患者进行下肢康复机器人辅助步态训练康复干预,采用被动/主被动交替训练模式干预20~40 min/次,1~2次/d,平均5 d/周,平均干预4~8周后(10~16 h),6 min步行测试(6-minute walk test, 6MWT)步行时间、10 m步行测试(10-meter walk test, TWT)步行速度,以及直接测量所得的步行速度均较干预前提高,Berg平 衡 量 表(Berg balance scale,BBS)评分较干预前改善。但下肢机器人辅助步态训练存在运动轨迹受限的不足,这使患者在步态训练中必须沿着限定的运动轨迹在矢状面内运动,而其水平面和冠状面活动得不到训练[30],导致步态训练中平衡功能的建立受限[31]及肌肉激活模式改变[16,32-33]。
总之,对发病早期、需要辅助才能进行移动的脑卒中患者借助下肢康复机器人进行步态功能康复,越来越成为临床康复工作者的选择。下肢康复机器人步态训练对脑卒中急性期、亚急性期及慢性期无法独立步行患者的步行功能(包括步行速度、步行距离),平衡功能,日常生活活动能力,生活质量等均有积极影响[34]。
2.2 下肢康复机器人对脑卒中患者步态相关平衡功能的影响平衡功能是影响脑卒中患者步态康复进程中的一个重要因素,也是评估脑卒中患者跌倒风险的关键指标。脑卒中患者的平衡功能既可以通过直接平衡训练来重获,也可以在步态训练中恢复[31]。Rojek等[35]的随机对照研究发现,经过4周的外骨骼式下肢康复机器人步态训练后,脑卒中患者人体压力中心(center of pressure,COP)改变,平衡控制能力改善,主要表现为受试者在睁眼状态下COP在矢状面和额状面的偏移量显著增加。
下肢康复机器人可以通过控制脑卒中患者的下肢活动轨迹来改善其对称性和协调性[29]。多项研究[31,36-37]表明,下肢康复机器人能改善亚急性期脑卒中患者步态相关平衡功能。刘惠林等[38]对40例脑卒中急性期患者进行的随机对照试验显示,采用下肢康复机器人结合传统康复治疗方法干预10周(每天20 min)后,患者下肢运动功能(Fugl-Meyer assessment,FMA)评分、功能性转移分级(functional ambulation category,FAC)和BBS评分均升高,表明患者下肢运动功能和平衡功能均改善。Bang等[39]的随机对照研究发现,脑卒中慢性期患者经过4周的下肢康复机器人步态训练后,BBS升高,优于传统步态训练。但Hidler等[19]的多中心随机对照研究显示,传统步态训练组训练后BBS评分高于下肢康复机器人步态训练组。2项研究结果的差异可能由传统训练方案不同所致,Bang等[39]的研究中传统训练组采用无减重支持下的跑台训练,而Hidler等研究中传统训练组训练方案由康复治疗师定制化。此外,Cho等[40]的交叉研究(干预8周)和Jeong等[31]的随机对照研究(干预4周)显示,下肢康复机器人步态训练与传统方法均可改善偏瘫患者的平衡功能,且这2种方法的改善效果差异无统计学意义。但Cho等[40]的研究还显示,下肢康复机器人步态训练改善四肢瘫患者平衡功能的效果优于传统方法。
由此可见,下肢康复机器人和传统的步态训练都可以改善脑卒中患者的平衡功能,但是哪种更有优势尚无定论。此外,多数研究对于下肢康复机器人干预前后患者平衡功能变化缺少更客观和量化的评估指标,而常基于BBS评估所得。尽管BBS对平衡功能评估具有较高的信效度,但其测量受众有局限。而且,脑卒中患者功能状态异质性较大,其神经系统损伤部位、损伤后抢救时间、康复介入时机以及康复训练的强度和密度等,都会影响其功能的恢复。下肢康复机器人步态训练改善平衡功能的效果尚须进一步研究。
2.3 下肢康复机器人对脑卒中患者步态参数的影响目前有约85%的脑卒中偏瘫患者的首要康复目标是恢复步行能力[41]。下肢康复机器人对脑卒中患者步态功能的影响主要体现于步速、步长和单支撑期占步态周期的百分比。下肢康复机器人可为脑卒中患者提供持续的、强度集中且平稳的康复训练,尤其是对于神经系统受损较严重的急性期患者,康复介入早期开始步态训练对改善其康复预后有重要意义[42-43]。
下肢机器人步态训练改善脑卒中患者步行能力的作用尤其体现于步行速度方面[44-45]。Hesse等[46]对30例亚急性期脑卒中患者进行的交叉研究显示,下肢康复机器人步态训练较减重支持下的跑台训练能更显著提高患者的步行速度。Bang等[39]发现,脑卒中亚急性期患者经过为期4周的下肢康复机器人步态训练后,步速、步频和步长均较采用传统训练方法的患者增加。赵雅宁等[47]发现,10周的下肢机器人步态训练除了使患者步长、步频、步速改善外,还使病灶侧动脉血流加快,说明下肢机器人步态训练不仅可以改善患者的步行功能,还有助于其脑功能的恢复。
此外,下肢康复机器人步态训练还有助于促进脑卒中患者步行中受累侧下肢肌肉激活时序趋于正常,从而提高步态模式的对称性[32,35]。下肢康复机器人步态训练对脑卒中亚急性期、无转移能力以及功能受损伤较严重患者的步态参数改善更佳[29]。但是下肢康复机器人对于中重度步态功能损伤患者的干预效果是否优于传统步态训练方法仍存在诸多争议:一方面下肢康复机器人的外固定装置将患者的骨盆束缚于冠状面上,迈步动作仅作用于双下肢,限制了正常步态中骨盆旋转及双下肢间重心转移[30],这种运动模式不仅可能改变中重度步态受损患者步行中的下肢肌肉激活模式,而且会影响步行过程中单支撑的稳定性[48-49]和诱发摆动相摆动腿的异常加速模式[50];另一方面下肢康复机器人引导式步态训练模式一定程度上会影响患者下肢肌肉的随意收缩能力[51]。
综上所述,下肢康复机器人步态训练能够有效促进脑卒中急性期、亚急性期和部分慢性期患者步行功能的恢复。下肢康复机器人可以为脑卒中患者提供持续的康复训练,同时减轻物理治疗师的负担。但是,下肢康复机器人步态训练是否优于其他的步态训练方法及训练干预时机仍有待进一研究。目前,下肢康复机器人不能取代康复治疗师,只是康复治疗师的康复工具,在临床步态康复中应根据患者具体情况,与其他康复技术相结合,为脑卒中患者提供更有效的康复治疗。
利益冲突:所有作者声明不存在利益冲突。
