基于UWB的井下人员定位算法研究
2022-07-07贺磊魏明生仇欣宇唐守锋李文帅张旭
贺磊, 魏明生, 仇欣宇, 唐守锋, 李文帅, 张旭
(1. 江苏师范大学 物理与电子工程学院,江苏 徐州 221116;2. 中国矿业大学 信息与控制工程学院,江苏 徐州 221008)
0 引言
瓦斯爆炸、塌方等灾难严重威胁井下人员的生命安全,因此有必要建立有效的井下人员精确定位方案,当发生矿难时,施救人员可对矿工进行精准定位并展开营救[1]。当前井下定位技术种类较多,如RFID、ZigBee、WiFi、蓝牙等[2]。这几种定位技术基本可满足井下定位要求,但仍存在信号传输距离短、定位精度较低、功耗较高、易受外界干扰等缺陷[3-5]。超宽带(Ultra Wide Band,UWB)定位技术采用纳秒级别的脉冲信号进行通信,具有较高的时间分辨率,适用于非视距环境下的定位,且定位精度较高,与其他几种定位技术相比具有明显优势。
UWB定位基于测距原理,常用的测距算法包括单边双向测距(Single-Sided Two-Way Ranging,SS-TWR)和双边双向测距(Double-Sided Two-Way Ranging,DS-TWR)。其中SS-TWR因受时钟偏移的影响,误差较大[6-7]。DS-TWR在测距双方之间发送多条信息,获得多个时间戳,通过加长测量周期来提高测量精度[8]。井下人员定位对精度要求较高,因此适宜采用DS-TWR测距算法[9]。根据测距信息,通过位置解算算法可得到定位标签的坐标。本文通过静态实验和动态实验对加权最小二乘(Weighted Least Squares,WLS)算法[10]和CHAN[11]两种位置解算算法进行对比分析,并通过均方根误差和误差累计分布函数(Cumulative Distribution Function,CDF)综合评估定位精度。
1 DS-TWR测距模型
DS-TWR测距模型如图1所示,其中Tprop为UWB信号在定位基站与定位标签之间的传播时间,可利用定位基站和标签的时钟系统记录的时间戳T1-T3,-来计算;Tround1为基站开始发送信号到基站接收到标签信号的时间;Treply1为标签接收到基站信号到标签开始回复基站的时间;Tround2为标签开始回复基站到标签再次接收到基站信号的时间;Treply2为基站接收到标签的回复信号到基站再次发送信号的时间;Tm1,Tm2分别为定位基站和标签的系统时钟。
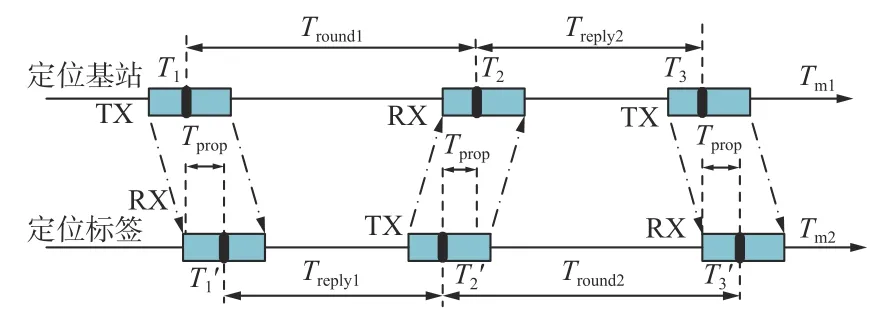
图1 矿井DS-TWR测距模型Fig. 1 Mine DS-TWR ranging model
由图1可得
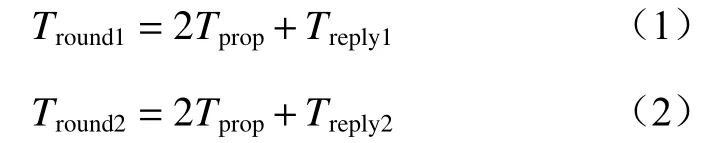
将式(1)和式(2)相乘后移项可得

将式(1)和式(2)代入式(3)可得
由式(5)可计算出电磁波在定位标签与定位基站之间的传播时间,结合信号传播速度可计算出传播距离。获得定位基站与定位标签之间的距离后,再通过位置解算算法计算定位标签的坐标[12]。
2 位置解算算法
2.1 WLS算法
设4个基站的坐标为(xi,yi),i=1,2,3,4,待测定位标签的坐标为(x,y),定位标签到基站的真实距离为ri,测量距离为,根据最小二乘算法可得

求解式(6)即可得到定位标签坐标的最优估计值(x,y)。
普通最小二乘算法适用于各个误差项相等的情况,由于井下UWB定位环境复杂,为了提高定位标签位置解算精度,在普通最小二乘算法中引入加权矩阵W。设定位标签到第i个 基站的测距误差为βi,则有

用测量距离与真实距离的平方差表示误差矢量:

在实际应用中,测量误差远小于测量的距离,因此式(8)中的项可以忽略不计;由于不方便测量定位标签到基站的真实距离,通常利用代替真实距离ri进行近似计算。误差矢量可以进一步表示为

误差矢量φ的协方差矩阵为

式中E为期望函数。
最后对Ψ求逆矩阵,得到加权矩阵W:
结合式(6)得到WLS算法计算公式:

上述推导是针对4个定位基站的情况,当基站数量为4个以上时可在此基础上类推。
2.2 CHAN算法
在求解二维平面中的位置坐标时,若定位基站的数量大于3,则会有冗余测距信息,可得到2个以上非线性方程。在CHAN算法求解过程中,首先使用WLS算法估计定位标签的初始位置坐标,然后结合已知约束条件再次应用WLS算法,得到最终位置坐标估计值。
仍以4个基站为例对CHAN算法进行推导,设z=[x,y,r1]T,根据文献[13]可得

式中:ri1为定位标签到第i个基站与到第1个基站之间的距离差;;xi1,yi1分别为第i个基站与第1个基站的横坐标之差和纵坐标之差。
将式(14)改写为

当矩阵Ga可逆时z的最大似然估计值za为

式中ψ=c2BQB,c为信号传播速度。
在实际应用中通常用Q代替ψ,则式(16)可改写为

根据定位基站与定位标签之间的距离约束关系得到误差矢量:

φ1的协方差矩阵为

采用WLS算法对式(18)进行求解,得
最后根据先验条件可以求得定位标签坐标估计值。
3 实验分析
为了对比分析WLS算法和CHAN算法的效果,在实验室模拟井下环境,采用4个定位基站进行实验,如图2所示。设4个定位基站BS1-BS4的坐标分别为(0,0),(560 cm,0),(560 cm,800 cm),(0,720 cm),实验设备数据更新频率为1 Hz。
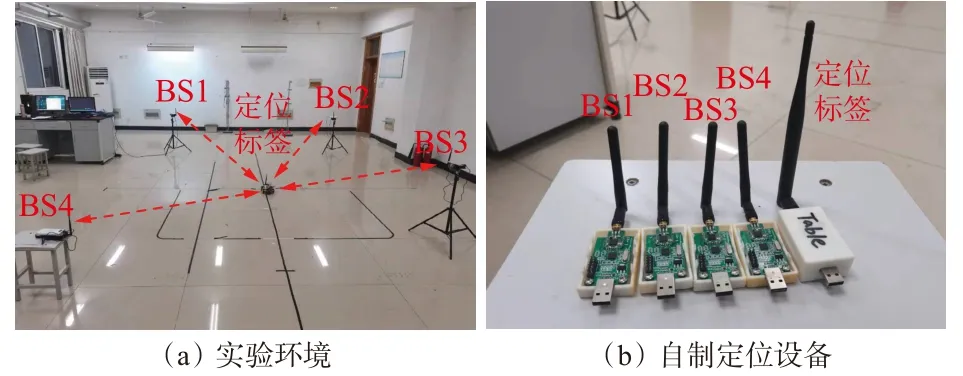
图2 实验环境与自制定位设备Fig. 2 Experimental environment and self-made positioning equipment
3.1 静态实验分析
实验开始时,将定位标签放置在坐标(320 cm,400 cm)处,采集测距信息,并利用2种算法进行定位,结果如图3所示。
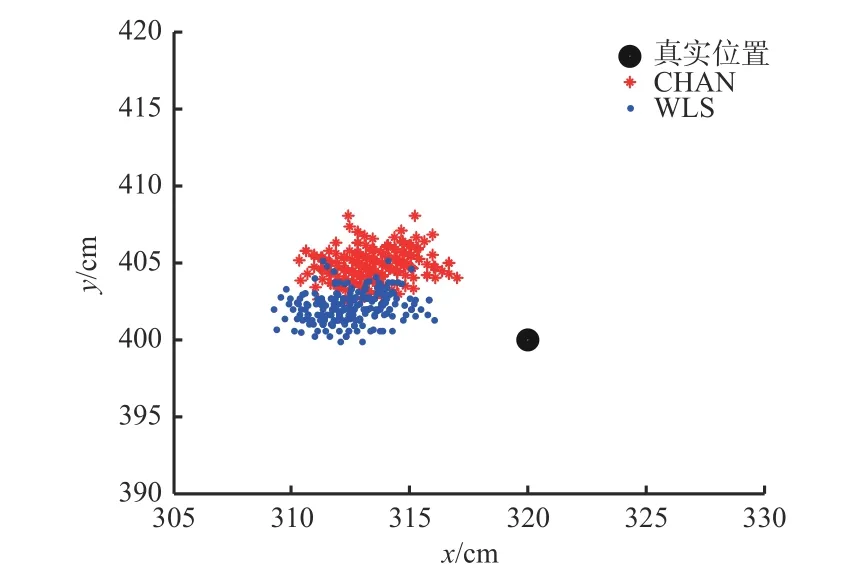
图3 CHAN与WLS算法定位结果(静态实验)Fig. 3 Positioning results of CHAN and WLS algorithms (static experiment)
计算定位标签估算位置与真实位置的欧氏距离,并绘制误差曲线,如图4所示。可看出,定位标签为静态时,CHAN算法的定位误差小于WLS算法。经计算,CHAN算法和WLS算法的均方根误差分别为5.878 6,8.007 4 cm,CHAN算法的均方根误差比WLS算法低26.59%。
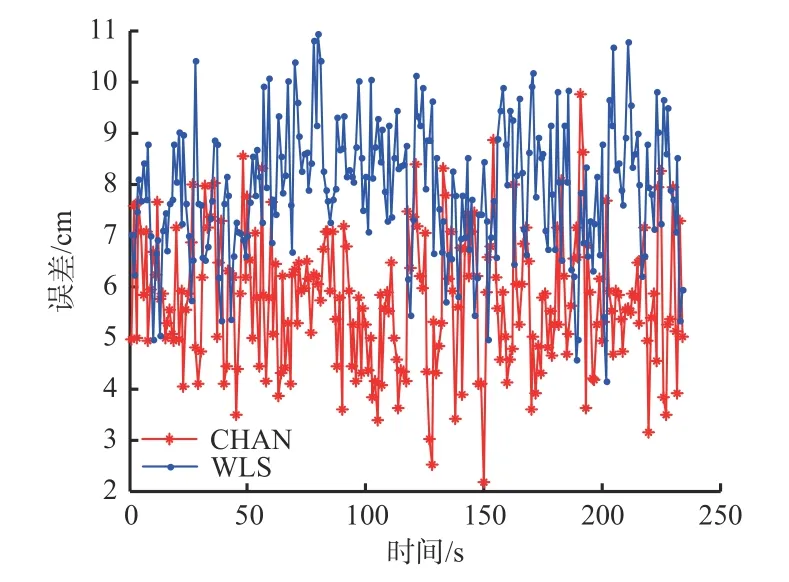
图4 CHAN与WLS算法误差对比(静态实验)Fig. 4 Comparison of errors between CHAN and WLS algorithms(static experiment)
CHAN算法和WLS算法的误差CDF曲线如图5所示。可看出,CHAN算法的误差CDF曲线在WLS算法的左上方,在设置同一误差门限值的条件下,CHAN算法的误差在门限值以内的概率较高。例如,当误差门限值取7 cm时,CHAN算法的误差在7 cm以内的概率约为80%,WLS算法的误差在7 cm以内的概率约为25%。
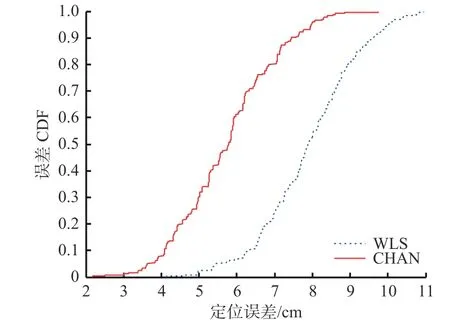
图5 CHAN与WLS算法的误差CDF曲线(静态实验)Fig. 5 Error CDF curves of CHAN and WLS algorithms(static experiment)
3.2 动态实验分析
利用移动小车搭载定位标签,模拟井下携带定位标签的作业人员。定位标签起始点坐标为(160 cm,400 cm),结束点坐标为(480 cm,400 cm),小车匀速行驶。利用CHAN和WLS算法得到的定位结果如图6所示。可看出,用CHAN算法得到的轨迹更加接近真实轨迹。
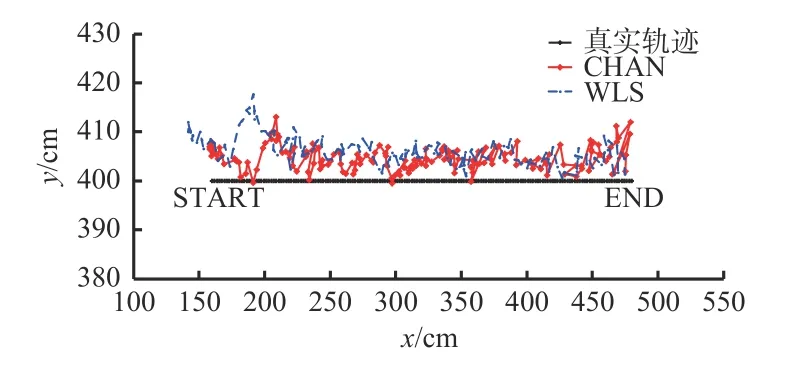
图6 CHAN与WLS算法定位结果(动态实验)Fig. 6 Positioning results of CHAN and WLS algorithms (dynamic experiment)
计算不同时刻定位标签估算位置与真实位置的欧氏距离,并绘制误差曲线,如图7所示。可看出,定位标签为动态时,CHAN算法的定位误差小于WLS算法。经计算,CHAN算法和WLS算法的均方根误差分别为12.292 3,21.180 9 cm,CHAN算法的均方根误差比WLS算法低41.97%。
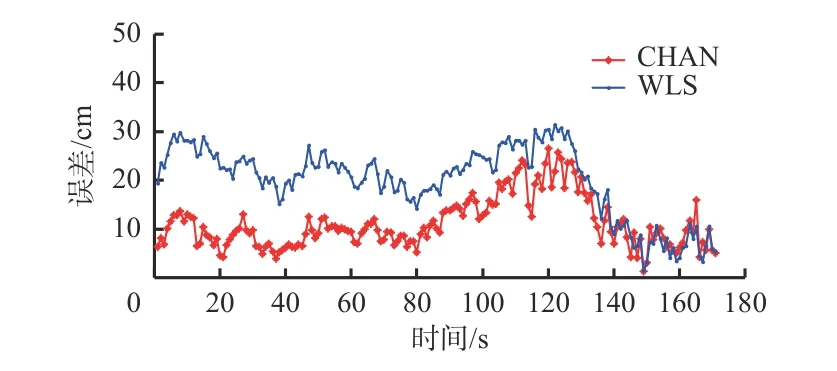
图7 CHAN与WLS算法误差对比(动态实验)Fig. 7 Comparison of errors between CHAN and WLS algorithms(dynamic experiment)
CHAN算法和WLS算法的误差CDF曲线如图8所示。
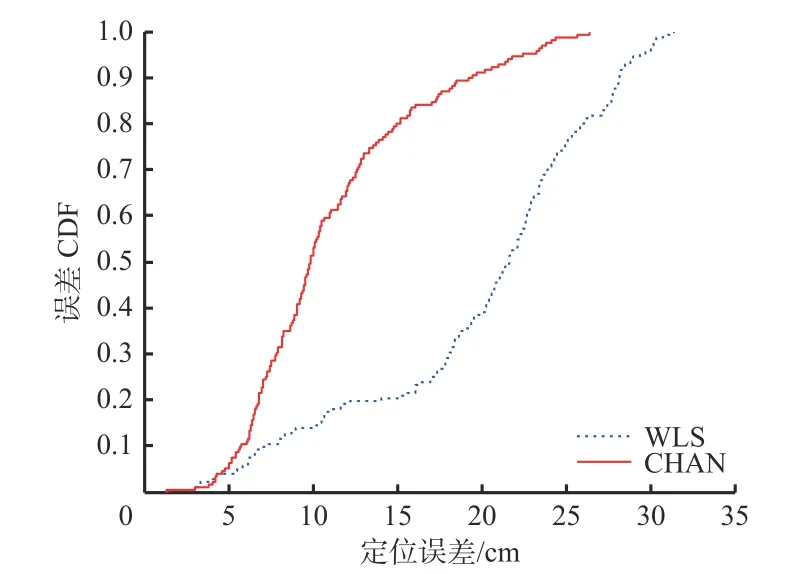
图8 CHAN与WLS算法的误差CDF曲线(动态实验)Fig. 8 Error CDF curves of CHAN and WLS algorithms(dynamic experiment)
从图8可看出,CHAN算法的误差CDF曲线基本在WLS算法的上方,说明在动态实验中CHAN算法的定位精度高于WLS算法。
4 结语
研究了基于UWB的井下人员定位算法。采用DS-TWR方式测量定位基站与定位标签的距离,利用WLS算法和CHAN算法对静态测距信息和动态测距信息进行解算,最后通过均方根误差和误差CDF综合评估2种算法的定位性能。实验结果表明:静态实验时,CHAN算法和WLS算法的均方根误差分别为5.878 6,8.007 4 cm,CHAN算法的均方根误差比WLS算法低26.59%;动态实验时,CHAN算法和WLS算法的均方根误差分别为12.292 3,21.180 9 cm,CHAN算法的均方根误差比WLS算法低41.97%;CHAN算法的定位精度高于WLS算法,更加适用于煤矿井下人员定位。