自跟随清吸机器人的开发设计
2022-07-07谢平春周诚远
谢平春, 周诚远, 景 斌, 李 亮
(长沙中联重科环境产业有限公司, 湖南 长沙 410006)
引言
随着经济的高速发展,我国环卫工作质量获得了巨大的提升,扫路车、洗扫车、抑尘车等大型环卫设备已被广泛应用于城市的主次干道,这有效降低了环卫作业的劳动强度,提高了清洁作业效率和机械化作业水平。但在城市人行道、背街小巷、公园景区、商业区、生活社区等“城市毛细血管”的清扫保洁工作却仍然未得到有效改善[1],上述区域因大型环卫设备无法进入,机械化作业水平极低,如保洁、清扫作业仍以人工为主,主要表现为环卫工人利用扫把簸箕或拖拉垃圾箱进行清扫捡拾作业,劳动强度大,效率低。
为提升城市精细化管理,已有深圳、上海等城市要求人行道、非机动车道等区域实行机械化作业。同时,伴随人工智能、视觉识别、激光雷达等信息技术的高速发展,小型、智能、少人或无人的智能环卫产品应运而生,其以机动灵活、操作便捷、智能高效等特点受到了市场关注和认可。
小型智能环卫产品在进行开发时,既应充分考虑整体结构尺寸,在有限空间内合理布置各种零部件以实现整机作业功能,也应考虑智能创新设计需求。本文以市场上一款基于激光雷达进行目标识别并可自动跟随作业者行进,通过作业者操作手持吸管进行垃圾吸拾作业的自跟随清吸机器人为例(如图1 所示),就智能环卫产品的开发设计进行分析和探讨。

图1 自跟随清吸机器人
1 整机结构设计
1.1 开发设计原则
本产品用于城市背街小巷、人行道、生活社区等场景的环卫保洁,有两个关键特征,分别为驾驶转场和自动自跟随吸拾作业。产品设计以提高劳动作业效率、降低环卫工人劳动强度为导向,充分考虑作业场景等因素,基本原则如下:性能、质量、尺寸充分考虑作业要求;线控底盘满足智能自跟随控制要求;采用磷酸铁锂电池驱动,安全绿色环保;智控系统稳定安全可靠;整机操控简单便捷;产品成本可控,性价比高。
1.2 整机结构组成
整机由线控底盘、智控系统、气力系统、除尘系统、覆盖件等组成。整机造型小巧美观,操作简单、便捷,智能化程度高,通过性好,性能稳定可靠。
1.3 底盘设计
线控底盘作为整机核心部件,其性能直接决定产品的稳定和品质。在进行底盘设计时,结合产品的设计目标和应用场景,重点考虑其通过性、制动和转向动态响应等性能。
1.3.1 通过性
应用于城市背街小巷、生活社区的环卫产品,其通过性直接影响到产品的使用范围。通过性主要考察外形尺寸的设计,需重点关注设备使用城市人行道止车石、限行墩等的通行宽度。驱动和转向的布置也非常关键,为减小转弯半径,前后桥可布置为类三轮结构,即前双轮共轴转向,后桥驱动。本产品宽980 mm,转弯半径1.25 m,通过性良好,机动性强。底盘布置结构见下页图2。
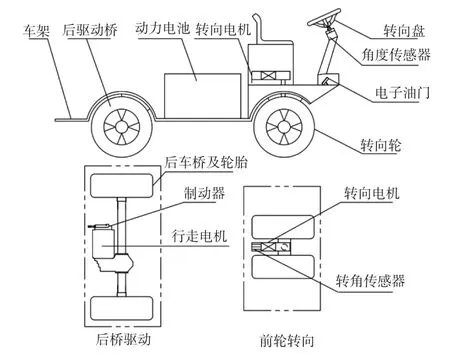
图2 自跟随清吸机器人底盘布置图
1.3.2 制动性能
自跟随清吸机器人自跟随作业时需做到“人行机走、人停机停”,机器人应始终在作业人员后方保持安全的人机距离,要求瞬态、高效的制动响应。电磁制动器结构紧凑、响应灵敏,将其作为中央制动器安装于后驱动桥电机尾部提供整机制动力。为保证机器人具有良好的制动效能,要求合理地确定前、后轮制动器的制动力矩。本机制动力全部由后桥电磁制动器提供。电磁制动器在选用时考虑以下两种制动状态:
1)应急制动:应急制动时,后轮将抱死滑移,所需的制动力矩Ts:

式中:M 为机器人总质量,取720 kg;g 为重力加速度,取9.8 N/kg;X 为质心与前轮轴中心线横向距离,取0.55 m;L 为车辆轴距,取0.94 m;φ 为车轮附着系数,取0.7;r 为车轮静力半径,取0.203 m;Z 为质心与前轮轴中心线纵向距离,取0.7 m。
2)驻车制动:车辆上坡、下坡时在坡道上能够停驻的条件是,车辆的驻车制动力矩大于或者等于车辆自身重力在下坡方向的分力矩[2],因此机器人的驻坡条件为:

式中:TZ为驻车制动力矩,N·m;α 为坡道角度,要求≥15%坡度。
后桥需要提供的最大制动力矩:

电磁制动器制动力矩:

式中:i 为后桥减速机减速比,取31.64;μ 为总传动效率,取0.85。
本产品选用的电磁制动器制动力矩为15 N·m,由式(1)—式(4)计算需要的制动器制动力矩T=14.34N·m<15 N·m,满足使用要求。
1.3.3 转向性能
线控转向由路感反馈总成、转向执行总成、控制器及传感器组成。而路感反馈总成主要包括转向盘、路感电机、减速器和扭矩转角传感器,功能是驱动路感电机实现控制器给出的反馈力矩指令,对驾驶员施加合适的路感[3]。本产品运行速度较低(0~5 km/h),运行平稳,在转向盘轴安装了旋转型双向阻尼器为驾驶者提供转向驾驶路感。
转向时,转向盘的转向信号通过角度传感器收集至控制器,再控制转向电机驱动转向轮转动。进行转向电机选型时,先计算前轮转动的阻力矩TR[4]:

式中:f 为轮胎和路面的滑动摩擦因数,取0.7;G1为转向轴负荷,取2 940 N;P 为轮胎气压,取0.193 MPa。
本产品转向电机外接一套减速比为4 的齿轮组以驱动转向轮。转向电机至转向轮的驱动扭矩为:

式中:tmax为电机峰值扭矩,取1.28 N·m;i1为齿轮组减速比,取4;i2为电机减速箱减速比,取51;η1为电机减速机传动效率,取0.7;η2为一级齿轮组传动效率,取0.95。
将相关数据代入式(6)得:Tmax=174.18 N·m。
从式(5)、式(6)知TR<Tmax,电机选用符合要求。在正常运行时,轮胎滚动与地面产生的滚动摩擦阻力矩远小于滑动摩擦阻力矩。在进行电气系统设计时,还可将转向和行走驱动单向联动,当行走电机驱动后再启动转向电机,以减少转向的能量消耗。
1.4 智控系统
本产品分手动驾驶和自动跟随两种作业模式,手动驾驶模式下,作业者操作方向盘和油门踏板控制机器人行驶;自跟随模式则通过基于激光和超声波雷达进行目标和障碍物识别,再由控制器控制线控底盘跟进作业者行进实现自跟随,采用的控制流程见图3。
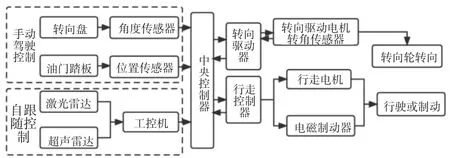
图3 智控系统控制框图
1.5 气力系统
气力系统一般由风机、输送管、吸盘或吸管、240 L垃圾桶等部分组成,属吸送式、稀相气力输送。设计气力系统气流速度应大于垃圾悬浮流动速度,对于粒度均匀的松散物料,一般取悬浮速度的1.5~2.5 倍作为合理的气流输送速度。对于粉状物料和纤维状物料,由于其在输送过程中容易残留附着在管壁,一般取悬浮速度的数十倍作为气流输送速度[5],确定管道流速后,可依次确定气力系统风量、风阻及风机相关参数。
1.6 除尘系统
除尘系统用于垃圾吸拾作业的气流过滤,将垃圾阻隔至垃圾桶内,现常用喷雾或滤筒/布过滤除尘,选用滤筒/布过滤的除尘系统除了考虑系统的清洁维护,还需考虑过滤材质的防油、防水性能。
1.7 覆盖件
随着小型环卫设备深入居民生活区,乖巧明亮的造型已成为一道靓丽的风景线。采用滚塑或吸塑工艺可制作造型较为复杂的覆盖件以提高产品美观度,但在提升产品造型设计时,也需考虑产品的维护便利性,确保产品既美观又维修方便。
2 产品的实际应用效果分析
图4 是自跟随清吸机器人驾驶转场和自跟随清吸作业图。转场时,操作方向盘和油门踏板即可驾驶清吸机行驶。自跟随作业时,机器人准确识别作业人员并自适应跟随行进,始终保持适当的人机安全距离,作业人员可轻巧操作吸管吸拾路面垃圾。相比传统的作业模式,产品显著提高了效率,降低了劳动强度。

图4 自跟随清吸机器人驾驶转场和自跟随作业
3 结语
本文以市场上某款小型自跟随清吸机器人为例,分析探讨了整机及关键零部件选型设计要求。对于小型智能环卫产品而言,需重点关注产品的整机结构尺寸、底盘行驶性能和智控系统稳定性。本款产品开发以客户需求和国家环卫政策为指导,产品性能优良,质量可靠,已在深圳、上海、北京等多地批量交付使用,助力提升我国环卫精细化管理和环卫作业机械化水平。
