地面三维激光雷达在坝区地形测量中的应用研究
2022-07-07崔宝牛聂越慧
崔宝牛, 聂越慧
(中国建筑材料工业地质勘查中心山西总队,山西 太原 030031)
0 引 言
通过精确地标定激光雷达的安装参数,能够使其观测数据更加真实地反映周围环境。测量中的小误差可能在变换数据时导致较大误差,通过目测和手工测量难以求得精确的变换关系,而且两坐标系间的相对转角关系不能通过直接测量得到。因此,需要设计相关算法来实现激光雷达的标定。
1 三维激光雷达的相关概述
1.1 三维激光雷达系统基本原理
激光雷达是将各种新型测量仪器的优势结合在一起,使其变成一种较为新型且具有更高科技含量的测量系统,不仅结合激光测距技术的相关优势,还将定位系统和惯性测量系统的优势融合在整个测量坐标数据中,并利用虚拟的数据影像来将各种数据以模型的形式向大众进行展示。不仅如此,三维激光雷达可以对地面、河流等一些独立性的物体进行标志,并且结合其数据来进行有效的信息收集和坐标凸显。整个三维激光雷达体系在进行具体测距时,所利用的原理可从以下三个方面来具体描述:
(1)当雷达系统处于做工状态时,将会由整个系统内部发出激光光束来进行表面物体反射和具体信息的收集;
(2)当反射信息以雷达的方式传回到回波信号接收器内,中芯处理器就可以根据这一状态来进行测量物体相关参数的确定,有效地提高测量未知的精准度;
(3)整个雷达测距系统将会结合具体的测量设备和信息,来进行具体姿态角度的调整,从而可以有效地确定雷达脉冲以最快的速度到达着力点,尽可能地减少发射与接收之间的时间。
1.2 地面激光雷达应用处理关键技术分析
(1)激光点云分类滤波。地面激光雷达应用处理体系主要是根据定位系统和相关反射回来的信息来进行环境和地理位置的明确,但由于具体地理位置分布较为广泛,地质状况也较为多样性,这些实际的外部状况都会增加整个激光雷达测绘技术的难度和复杂性。而操作人员可以根据激光来进行具体测量方式的分类,主要是可以对于收集到的信息利用图像的颜色深浅来进行有效的区分,利用图层的前后来进行激光分层的有效处理。前层背景下主要包含的物体为运动的行人和车辆,还可包含固态的建筑物体,但除城市的具体建筑物外,还存在较多的遮挡物来影响整个激光雷达应用体系的精准性,这就需要操作人员必须有效地完善自动识别体系和系统,来丰富调研的相关背景层,从而可以为建筑模型的未来发展奠定良好的道路。
(2)三维几何模型的生成。在进行三维激光雷达处理时,整个操作系统都是地面激光雷达应用处理体系中最为重要和关键的一个部分。
2 设计原则
(1)在进行坝区工程的具体设计时,必须结合当地的施工工程和地质情况来进行具体的处理,深入到实际地质情况中去进行测绘资料的收集和探测,如此才能有效地将控制网科学合理地布局在各种坝区内。
(2)提高整个施工工作的精准度,以较高标准为要求来进行相关测量位置精准度的提高,操作人员应该以较高的起点来进行自我要求,最大限度地降低后期在进行测绘工作时产生的各项误差。
(3)在进行控制网的操作和布局时,应该根据具体的施工状况来进行放样处理,还应该有效地考虑到具体施工工作中的费用,最大限度地降低操作过程中产生的费用,提高整个设计方案的科学合理性。
(4)使用较为简洁且操作较为简便的设计手段,帮助操作人员可以以简单的施工操作手段融入整个设计和操作工作中。
3 应用效果分析
3.1 项目概况
某坝区,测量区域两侧的山体较为雄壮,地势较高,距离山顶的高度超过4 000 m,最大高差可达1 000 m,属于高山地貌,环境严寒,空气干燥,运输状况以及通信状况都相对较差,作业难度显著提升;坝址区内所含河谷较为狭小、坡势陡峭,属于深V形峡谷,存有许多悬崖。这类繁杂性极高且较为特殊的地貌状况会对检测工作造成进一步的限制和不良影响。融合坝区地貌特征来看,为了进一步缩减现场检测作业的风险,保障员工安全,并进一步提高作业检测的效率以及信息精确程度,防止发生预测死角的出现,运用地表三维激光的高科技手段对八滩水电工程开展地貌检验,经过对细节以及特殊化功能的使用,形成1∶1 000以及1∶500的大比例地形图和数据化预测模型,为后续的项目策划以及动工提供精准化信息支持。
3.2 作业中采用的技术规格
相关工作需要依照《混凝土坝安全监测技术规范》、《国家三角测量和精密导线测量规范》以及《国家水准测量规范》之中的相关数据和流程开展。平面预测网作业基点之中的误差以及高程预测网作业基点的误差必须保持在1 mm以内。以上工作中需要运用的科技规格大多可以采用:
(1)水平角预测运用Wild t3经纬仪依照综合组合的方式开展预测需求,方向权P=m×n=42。
(2)三角高程天顶距观察预测的相关数据是依照测距边改良平距对天顶距预测准确度的需求来进行估测的。因为观测边角度大多都较小,所以对三角高程的预测精准度需求也相对较低。经过预估,天顶距运用t3经纬仪预测4次便能够与斜距归算为平距的精准需求相适应。
(3)边长预测运用me3000测距仪器开展测量,每条边长所必须对预测每单向边需求分做两个阶段开展预测,每个单项为一阶段,其读取数据以及预测正反相读数各4回。
(4)高层预测网络运用n3水准仪器以及铟钢标尺对每测段按照一等水平需求开展往返预测。
3.3 数据处理方案
预处理的措施主要囊括:测距边气象纠正仪器加/乘常数,纠正预测斜距精准归算至标新斜距最后计算到320高层面平距;和双金属标链接的高差温度纠正水平,高差的量尺纠正(因为垂直位移观察预测范围较小,所以不开展重力异常纠正以及水准面倾斜纠正);分组观察预测水平方向的测量平台平差;对经过处置后的观察测量信息开展整合和收集。
3.4 应用效果
3.4.1 精度校验
因为预测设备本身存有误差,预测进程之中存有人为误差,链接进程之中存有误差以及把控点坐标存有预测误差等要素,最终数据是否可以与精准需求相适应,必须经过精准度检验来确定。本次工程共有557个检验点,与测量区域的综合范围相一致,结合相互差异的地貌类型,在地形改变较为明显的区域可以添加检验点的数量,进一步提高科学性以及合理性,从中抽取35个检验点开展地貌特点为平面精准度检验,平面位置之中的误差需要保持在0.157 m左右,结合《水利水电项目设计预测标准》对1∶500的地貌预测数据精准度的需求,并与之适应。
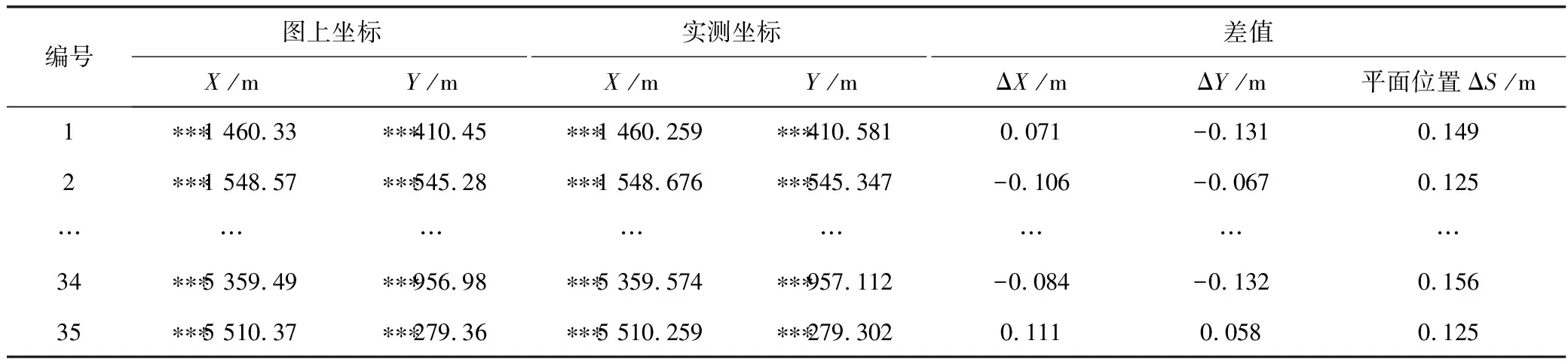
表1 地物特征点平面精度校验表
3.4.2 土石方量计算
激光点云信息精准度较高,运用其所形成的大比例尺度数字高程模型对土石方数量规范获得的数据有较高的精准性,经过改良策划体制,进一步缩减挖填方量,为完成填挖的协调性提供技术支持,节省工程运作费用,具备以往测量所无法达到的功能和技术。相关工程通过策划断面图以及数据高程平台作为主要参考,运用业内复核归算方法对场内公路交通项目、土石方策划项目量开展整理和数据收集。最终数据表明,运用激光点云信息所形成的断面图以及数据高程平台归算所获得的土石方量更加靠近工程审定数目,其误差也远远小于使用以往计算方式所获得的动工图项目数量。
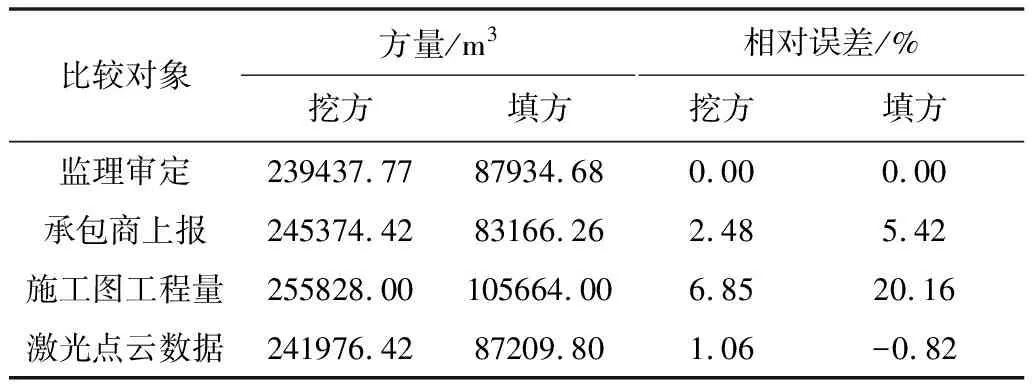
表2 进场公路土石方量计算复核结果
4 结束语
对于实测数据的修正说明,采用该模型对点云数据进行修正,可以有效减小仪器误差对点云数据的影响。因此,在通过三维激光扫描获得点云数据后,可以采用该方法,根据少量已知点数据,对各个测站的数据分别进行修正,大大提高点云数据精确度,同时,也将不同测站的点云数据转换到统一坐标系。平面和高程监测网虽然存在外业工作量大、人员素质要求高、施测周期长、受环境因素影响大等缺点,但它能够监测到大范围的区域变形,能较好地用于工作基点的校核且比较经济,所以仍不失为监测坝区变形的有效手段之一。
