空间碎片天基多星组网高精度测定轨*
2022-07-07宋叶志邵瑞王蕾胡小工叶钊曾春平刘佳姜庭威
宋叶志,邵瑞,2,王蕾,2,胡小工,叶钊,曾春平,刘佳,2,姜庭威,2
(1.中国科学院上海天文台,上海 200030;2.中国科学院大学,北京 100049;3.航天东方红卫星有限公司,北京 100094)
1 引言
自20世纪中期以来,国际上发展了一系列高精度的空间目标测量技术,其中包括卫星导航系统、卫星激光测距系统、卫星多普勒等。一般而言,这些技术精度高,适合做科学研究或合作目标跟踪定轨,但通常需要在星上安装一定的载荷达到精确测量的目的,这种情况就不适合非合作目标的测轨。对于非合作目标,主要测量手段还是依靠光学和雷达测量技术。光学作为天文测量的经典技术,无需对目标发射电磁波,并且不需要目标主动发射信号,因此有独特的作用。
当前,美国空间监视网已编目有相当数量可跟踪的空间目标,主要由地基雷达和光学望远镜完成。除美国以外,俄罗斯的空间监视系统也具备空间编目能力,其编目包含多个目标的轨道和特征信息。欧洲从20世纪末开始,会定期采用地基CCD以及雷达系统对空间目标进行轨道监测,并利用观测数据进行初轨确定和轨道改进。
目前,国内空间目标监测主要依靠地面测控网,美国空间编目主要的测量手段之一也是地面台站联合监测。但是随着空间编目向更多、更小、更精确等方向发展,只依靠地面测控其局限性已经有一定的体现。尤其是在一些特殊任务中,地面测控可能存在时间和空间的盲区。因此,亟需其他途径与地基测量互补,其中,天基平台监测技术很自然地成为各国关注的焦点。
在空间目标编目任务中,传统的方法是在地面布设测控网。现考虑如果把望远镜安装在平台卫星上,对空间目标进行观测,有诸多优点。例如,可以24 h连续观测,不受白天黑夜影响、不受阴雨天气影响、天基观测没有背景天光影响,同样口径的望远镜,探测能力比地基观测强。因此天基探测可能会成为该领域的一个重要发展方向。
美国自20世纪90年代中期开始,发射了“空间中段实验”卫星,首次搭载天基测量相机,验证了天基平台的监测以及编目能力;之后不断对技术进行改进,直至2010年开始搭建天基太空监视系统 (Space Based Space Surveillance,SBSS),目前已经取得了阶段性成果。另外,欧洲和加拿大等也相继开展了天基光学研究,并具备一定的空间编目能力。国内相关领域研究公开较少,下面的文献给出了一些仿真分析。部分仿真分析过于理想,数据处理模型也较为简单。
本文针对天基监测的需求,研究了平台轨道数据处理、初轨确定和轨道改进方法。论证了不同模式下监测的性能。
2 平台轨道确定与组网
2.1 平台单星定轨技术与策略
发展天基平台对碎片进行测量跟踪,其中天基平台自身轨道精度对目标的计算起到制约作用。这里提出用星载导航接收机的方法进行平台轨道确定。
星载导航接收机定轨需要处理好相位的周跳探测、模糊度确定等关键技术。对于低轨卫星在轨道确定时候典型情况下除了估计轨道参数以外,一般同时估计星载钟差、模糊度、光压参数、大气经验力等。目前星载导航接收机定轨精度较高,事后处理可以达到厘米级。现在定轨条件下获得实时分米级轨道确定精度较为容易。
2.2 多星组网监测
为增强空间监测的时空覆盖能力,可以考虑多星组网模式进行监测。多星组网根据实际多星数目,考虑选用星座类型。其中,星座类型的选择还需要考虑相机工作模式。衡量星座重要指标之一是星座对空间的覆盖能力。
天文定位利用光学拍照经图像处理得到目标在天球坐标系下的赤经赤纬。在数据处理环节利用赤经赤纬就可以实现对目标的轨道信息计算。
光学测量与图像处理环节将决定最终轨道服务的性能。通常,根据飞行任务不同的场景,相机安装有多种模式,常见的有沿轨、垂轨和凝视等几种。
在仿真系统搭建过程中,要尽可能考虑实际情况。实际数据可视既受到自然条件的影响,也受到相机性能和安装模式的影响。
设平台轨道在天球坐标系下位置为r,下标s代表平台目标;目标轨道在天球坐标系下位置为r,下标obj代表目标;太阳在天球坐标系下位置r,下标sun代表太阳。
对于不同的CCD相机,其作用距离有一定的差异,设作用距离为ρ。则可视条件为:

考虑太阳、平台和目标的几何关系,当在太阳光和平台视向距离处于一定条件下,目标会出现不可视现象。


设相机锥角半角为λ,可视条件为:

测量数据是多种约束下并集条件获得。因此,对星座覆盖能力评估需要结合相机性能、工作模式等多种因素。
2.3 特定目标的凝视跟踪
无论采用单星还是星座组网,通常都是对空间区域的扫描式普查。在一些特殊情况下,需要对重点目标进行凝视跟踪。
这类目标大部分为有一定任务的人造航天器。比如同步带的一些特殊卫星。根据设计的需求,跟踪区域可以是我国测控范围内,也可以是非我国测控范围。对于后者,需要建立卫星通信中继或者星上具有一定存储及自主能力。
2.4 天地联合监测
目前,我国碎片监测主要依靠地面测控网。天基监测可以和地基监测进行联合互补,这需要建立合理的数据通信能力,并建立数据信息系统中心,联合天、地甚至海基等多平台、多技术监测。其中,天基目标主要针对地基的覆盖盲区,海基目标可以针对一些特殊的任务进行数据补充。
3 天基光学测量初轨确定与轨道改进
3.1 新目标天基短弧轨道确定
发现新目标是碎片监测重要责任之一。碎片通常是非合作目标,因此对于新目标需要进行有效的初轨计算。
天基定初轨常用方法以改进的Laplace-Zhang(张家祥)方法较为常用。其基本原理是利用二体运动的F、G级数描述物体运动,并把光学测量的非线性方程写为形式上的线性方程。
初轨确定,首次迭代至关重要,如果首次失败则定轨结果将会失败。针对这一情况,可以采取一些策略获取“先验”信息。
首次迭代以后,可以采用F、G的封闭级数。即

采用封闭级数,可以直接用二体运动描述轨道,要计算开普勒方程E=M+esinE。更进一步甚至可以采用数值积分方法获得t时刻位置速度,并化为相应的开普勒根数。
在天基初轨确定中,常常会出现初轨不收敛情况。针对这种问题,除了改进传统方法之外,还可以利用一些特殊方法,进行短时数值逼近。其中多项式较为简单,因而比较常用。多项式在短时描述碎片的位置速度形式为:

通过多项式描述,可以把运动状态用时间幂级数的线性组合表示。但是观测方程依然是非线性的,这个是本质的。不过,用多项式表示轨道后,完整的定轨方程已经对初值不敏感。这在工程中已经得到证实。
由于多项式只适合描述短时轨道,更进一步可以采用样条法进行数值逼近。样条逼近可以实现长时间的轨道逼近,并且在复杂运动条件下,具有特别优势,详见文献[12]。
3.2 动力学轨道改进
对于编目库中已有目标,或者经过初轨计算获得初始轨道信息的目标,可以利用动力学轨道改进提高轨道精度。
对于碎片目标,主要考虑的动力学条件包括:
(1)地球二体问题及非球形引力场。
(2)地球固体潮汐及海潮摄动。
(3)日、月及大行星引力摄动。
(4)简单光压模型,其中C可以数据质量决定是否估计。在测量数据较少情况下,可以采用经验值。
(5)对于低轨目标,考虑用大气模型对目标飞行阻力计算。其中C也可以根据数据质量,决定是否在定轨时候进行估计。在数据不理想情况下,可以直接采用经验值。
除以上摄动外,还有广义相对论效应、地球返照辐射压等其他较小的摄动效应。这些效应往往因为是非合作目标,较难获得相应的特征信息,可以不予考虑。
由于碎片监测通常针对批量目标进行计算,因此计算效率是需要考虑的因素之一。建议采取精度高、计算速度快的积分器,如Adams-Cowell类型积分器。其变形包括Gauss-Jackson积分器、KSG积分器等。
4 新目标短弧初轨确定仿真
为验证定轨性能,仿真选择典型场景进行数据处理。这里选择两个算例作为分析,分别为低轨监测低轨目标和低轨监测高轨目标。算例1为低轨卫星平台监测低轨目标场景,表1为仿真的主要条件。

表1 低轨观测低轨目标仿真条件Table 1 Simulation conditions of observing LEO target from LEO
初轨确定结果与仿真“精密轨道”在RTN坐标下互差如图1所示。

图1 低轨观测低轨初轨确定与仿真轨道比较Fig.1 Initial orbit determination of observing LEO from LEO and comparison with simulation orbit
算例2为低轨平台监测高轨目标场景,表2为仿真的主要条件。

表2 低轨观测高轨道目标仿真条件Table 2 Simulation conditions of observing GEO target from LEO
初轨确定结果与仿真轨道在RTN坐标系下的轨道互差如图2所示。

图2 低轨观测高轨初轨确定与仿真轨道比较Fig.2 Initial orbit determination of observing GEO target from LEO and comparison with simulation orbit
仿真实验中,算例1与算例2精度在公里级别。初轨确定精度并不是监测系统最关注的,因为在初轨确定之后还有轨道改进用来提高精度。但是初轨确定能否成功收敛,则是需要注意的。
5 轨道改进分析
单星定轨性能在文献[11]中已有分析。因此这里直接针对多星问题进行数据处理。本节分别分析晨昏轨道4颗星对低轨卫星的监测和4颗小倾角轨道组网对同步带目标的监测性能。
算例3为4颗晨昏轨道组网,对异轨道面目标进行观测定轨。表3为仿真条件。
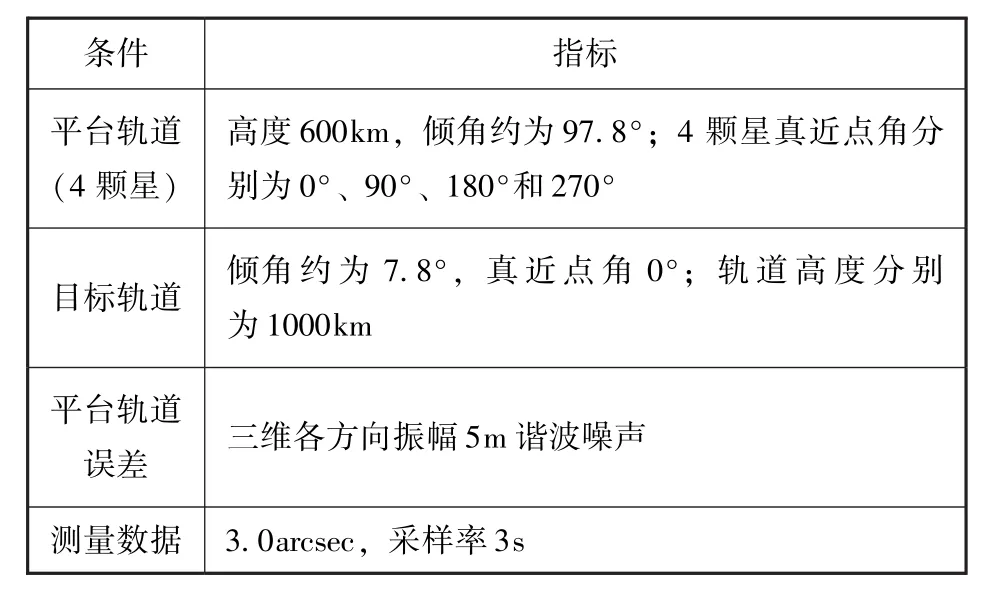
表3 晨昏轨道4星组网监测仿真条件Table 3 Simulation conditions of 4-satellite network monitoring in dawn-dusk orbit
采用4h数据定轨结果如图3所示。

图3 晨昏轨道组网星4h数据轨道确定与仿真轨道比较Fig.3 Comparison of 4-hour data orbit determination of dawn-dusk orbit networking satellites with simulation orbit
12h测量数据,轨道确定与仿真轨道如图4所示。
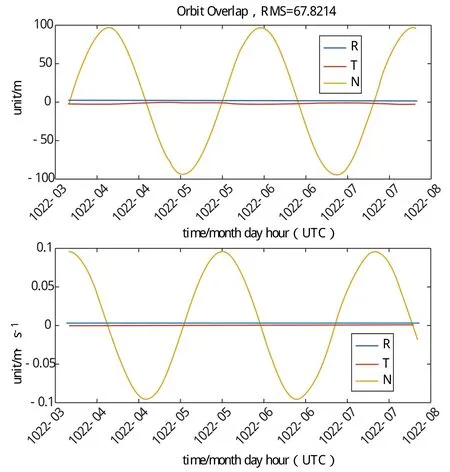
图4 晨昏轨道组网星12h数据轨道确定与仿真轨道比较Fig.4 Comparison of 12-hour data orbit determination of dawn-dusk orbit networking satellites with simulation orbit
算例4为小倾角轨道监测同步带目标的算例分析,表4为仿真条件。
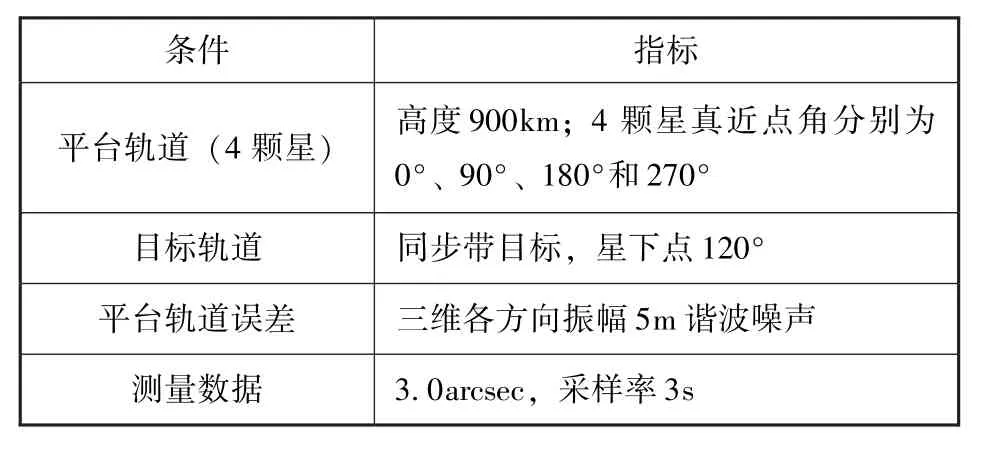
表4 小倾角组网星监测同步带目标Table 4 Small inclination networking satellites monitoring targets in synchronous belt
采用4h数据,轨道确定结果与仿真轨道比较如图5所示。

图5 小倾角组网星监测同步带目标4h定轨结果比较Fig.5 Comparison of 4-hour orbit determination results of low-inclination networking satellite monitoring targets in synchronous belt
采用8h数据定轨结果比较如图6所示。
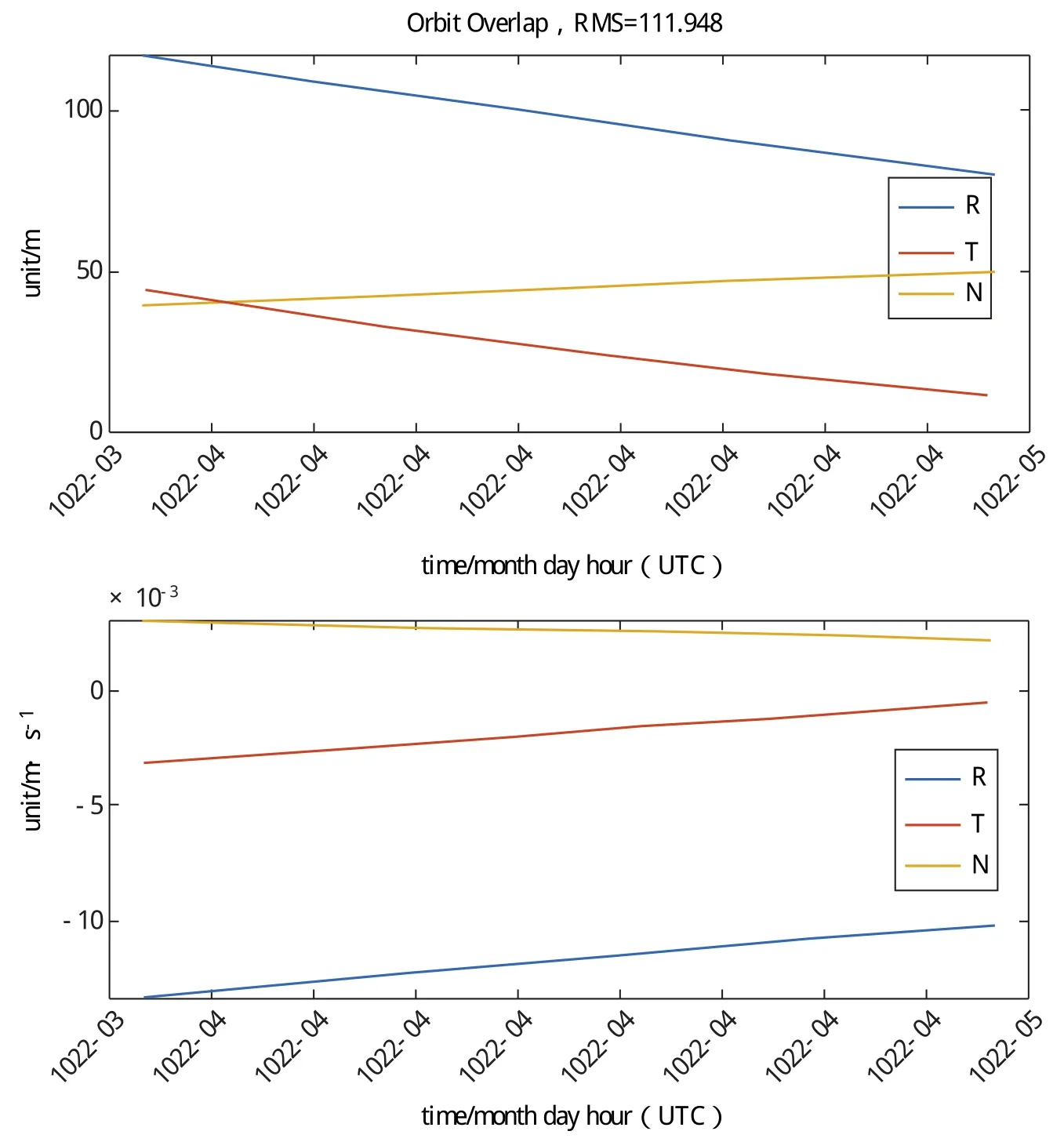
图6 小倾角组网星监测同步带目标8h定轨结果比较Fig.6 Comparison of 8 hour orbit determination results of low-inclination networking satellites monitoring targets in synchronous belt
不同的观测几何条件下,轨道确定精度差异较大。在同一种观测几何条件下,由于一定时间内相机的性能较难有大的提升,因此通过延长测量弧段可以较好地提高轨道确定精度,尤其在定轨法方程不理想情况下。通过不同情况下典型算例分析,轨道确定可以达到几十米至百米量级。
6 结论
本文研究了天基平台监测空间碎片的方法并针对典型情况做了一定的仿真分析。通过数据处理得到,在单星情况下,典型跟踪定轨精度可以到几十米至百米量级。天基监测笼统情况下,各种观测几何条件下定轨性能差异较大。通常针对特定性的场景进行分析会较有针对性。这在后续的研究中,将继续面向特定的应用需求,展开深入的研究。
在多星联合监测下,增加了空间的覆盖能力,对于特定的目标也增加了数据冗余,为轨道确定提供了更好的条件。完整的碎片监测系统涉及多平台模式、多测量类型等多种条件下的数据处理。因此需要多种技术联合,才能发挥最大的监测性能。更进一步而言,空间非合作目标的监测关乎空间安全以及空间态势,对大国而言,是必须要掌握的空间信息处理技术。