基于激光微多普勒效应的空间碎片探测技术研究
2022-07-07张勇司红利杨振郭鑫民张建隆
张勇,司红利,杨振,郭鑫民,张建隆*
(1.哈尔滨工业大学航天学院,哈尔滨 150001;2.火箭军装备部驻哈尔滨地区军事代表室,哈尔滨 150028)
1 引言
空间碎片近几年一直是国内外航天界比较关注的问题,关乎地球周边空间环境安全与治理。人类空间发射密度逐年递增,造成越来越多的空间碎片遗留在地球轨道上。截至2020年5月底,近地轨道能够被跟踪编目的10cm以上的空间碎片数量已经超过20000个,10cm以下的空间碎片数目更多。对于数目还在不断增长的空间碎片的远距离和高精度探测是对其能够进行有效编目监管以及清除的技术基础。
目前,空间碎片探测主要分为地基探测和天基探测两类。地基探测主要利用地面建设的天文望远镜或雷达站,通过直接观测方式获取空间碎片的轨道信息,但地基侦察监视存在容易受大气传播抖动、蒙气差、电离闪烁等不利因素的影响,空间分辨率低和作用距离近,无法完成对小尺寸空间碎片的精确定轨和微小碎片的视场捕获。天基探测主要利用安装在航天器上的雷达、望远镜以及光学传感器等对空间碎片进行探测,规避了大气影响,但受到在轨飞行器对其体积和重量的限制。
目前人们对空间碎片的探测主要关注于探测目标的大小、材质及其平动速度,但是空间目标的空间运动除了轨道线速度以外,还会受到自身残余角动量,以及重力梯度、光压摄动等影响出现翻滚、旋转等不受控运动。相比于空间目标较高的平动速度,不受控的翻滚、旋转运动速率较低,现有的探测手段无法对其进行准确探测。但是对空间目标的不受控运动姿态的远距离和精确测量,对于准确预测空间目标近地飞行轨道和坠地点都具有重要的意义,可以极大提升人类对包括空间碎片和小行星在内的空间目标对于地球本体危害的防御能力。
微多普勒探测技术是传统多普勒探测技术的扩展,能够在一定程度上反映目标所具有的与众不同的运动特性。激光波长比微波波长短10~10个数量级,理论上空间分辨率比微波成像更高,是能够在远距离取得厘米量级分辨率的唯一光学成像观察手段。因此,开展激光对空间目标的微动探测,能够利用相比雷达探测更大的多普勒频移,从而获取到目标更加丰富的微动特征,有望实现对空间碎片的远距离多维运动参数测量。
2 空间运动目标激光微多普勒探测原理
激光器发出一束波长为λ的激光E,该束激光经过光纤分束器分为两束,能量较大的一束激光经过发射光学系统照射到空间目标表面,另外一束作为本振光用于和返回光束进行混频外差。由于目标在进行自旋,导致目标后向散射回波信号e发生了微多普勒频移。假设发射激光E的初始相位为0,则发射激光表达式如式 (1)所示,接收回波表达式如式 (2)所示:
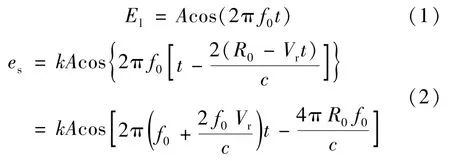
式中,A为发射激光强度;f为载频,f=c/λ,c代表光速,λ为激光波长;k为回波强度系数,0≤k<1;R为激光雷达到目标质心的距离(m);V为目标微运动在激光雷达视线上的速度分量 (m/s)。
将回波信号简记为式 (3)的形式:

令:

f为目标自旋产生的微多普勒频率 (Hz)。
从光纤分束器出来的另一束激光经声光调制器后作为本振光,见式 (5):

f为激光经声光调制后的频移,称f为基频,f=70MHz。
将式 (5)简记为式 (6)的形式:

A为本振光的强度,A=A;f为本振光的频率,f=f+f。
回波信号 (见式 (3))与本振光 (见式 (6))经光纤耦合器合束后在平衡光电探测器上进行差频,平衡光电探测器响应差频信号,生成的响应电流如式 (7)所示:

由式 (7)可知,微多普勒频率f调制在了基频f上,平衡光电探测器输出的电脉冲信号经过数据采集卡在计算机进行后续的时频特征提取和相对姿态参数提取。图1为上述的激光微多普勒探测系统组成示意图。

图1 激光微多普勒探测原理图Fig.1 Schematic diagram of laser micro-Doppler detection
光纤激光器的稳频激光通过分束器将大部分能量通过准直器发射,照射到目标上,10mW的激光作为本振信号与接收回来的信号在平衡探测器中进行外差处理,获得目标的距离信息、速度信息和微动信息。
3 基于微多普勒效应的激光探测技术进展
3.1 系统设计
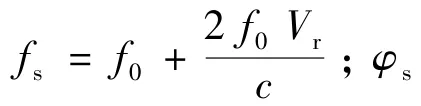
实际实验用的激光微多普勒探测装置设计如图2所示,采用激光和可见光及红外共口径探测,通过大视场红外及可见光相机为激光雷达捕获到目标后,通过快反镜将激光指向目标进行微多普勒测量,探测目标的距离、速度、自旋及姿态信息。该系统在光学口径200mm、平均功率200W的条件下,对10cm直径的空间目标探测距离可到50km以上,对更大尺寸的空间目标具有更强的探测能力,通过提高接收口径及激光发射功率也可以提高探测距离。
图2 激光微多普勒探测装置模型Fig.2 Model of laser micro-Doppler detection device
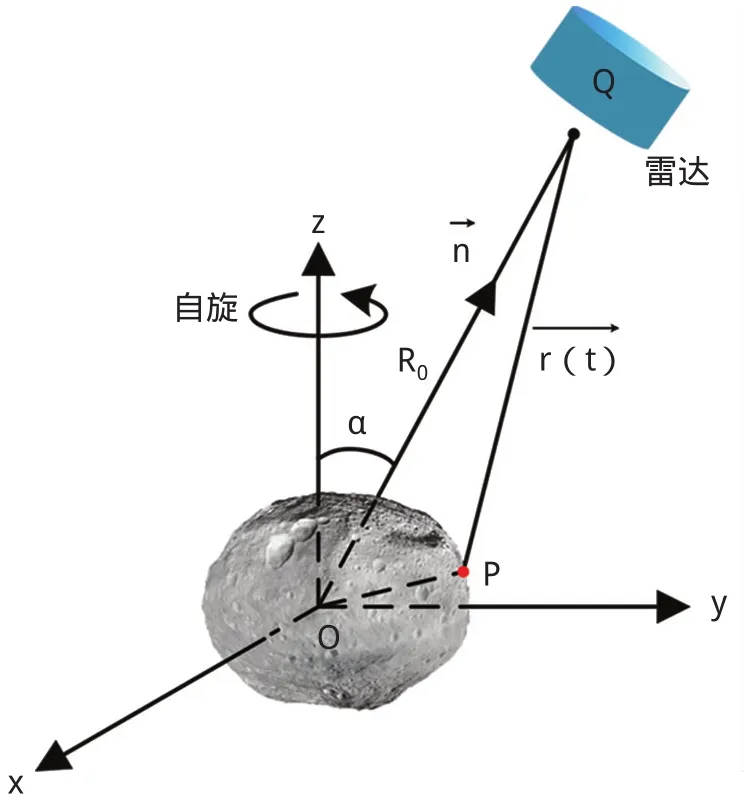
图3 空间目标自旋运动微多普勒回波建模示意图Fig.3 Schematic diagram of spin motion micro-Doppler echo modeling of space target
3.2 空间目标的微多普勒回波建模
对激光微多普勒回波信号而言,假设空间目标的主散射点为顶点p,初始时刻激光雷达与目标主散射点p的距离向量为r(0)=[x,y,z],t时刻激光雷达与散射点p的距离向量为r(t)=[x,y,z]。t时刻激光雷达与散射点p的距离向量r(t)由式 (8)给出:

式中,R为自旋变换矩阵,见式 (9)。

t时刻回波模型由式 (10)给出:

其中r(t)表示t时刻雷达与散射点p的“有效”距离,见式 (11):

微多普勒频率f可由回波模型的相位求导得到,见式 (12):

由回波表达式 (10)可知,回波信号是余弦调制函数,余弦调制函数的频率即为微多普勒频率,余弦调制函数的振幅与散射点的散射强度有关。
对激光微多普勒回波信号而言:t时刻回波模型由式 (13)给出:

式中,r(t)为t时刻散射点k的“有效”距离,r(t)=n·r(t);r(t)为散射点k在t时刻的位置向量,r(t)=R(t)·r(0);r(0)为散射点k在初始时刻的位置向量;K为立方体表面总散射点个数;σ为散射面元k的回波强度系数。
回波信号的相位项由式 (14)给出:
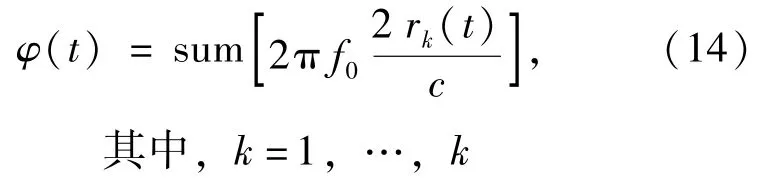
微多普勒频率由式 (15)给出:

注意:散射点k不是特指某个散射点,而是各个散射点的代称。式 (15)的物理意义在于将目标表面各个任意散射点的有效回波进行叠加,即k个余弦调制函数叠加得到激光微多普勒回波信号。
4 仿真结果与分析
按照空间碎片直径1m为典型目标进行激光微多普勒探测仿真,仿真条件如表1所示。
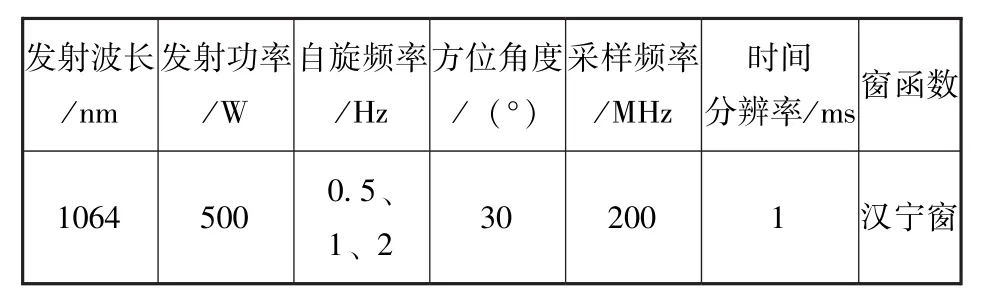
表1 直径1m空间碎片仿真条件Table 1 Simulation conditions of space debris with a diameter of 1m
微多普勒回波信号是一种时变非平稳信号,本文应用一种经典的联合时频分析方法——短时傅里叶变换 (the short-time Fourier transform,STFT)来计算回波信号的短时傅里叶时频谱,再对时频谱进行二维傅里叶变换提取图像的时间变化周期(或时间变化频率)。
由于目标的时频谱是各散射点时频曲线的叠加,时频特征的重复频率与目标的自旋频率存在一一对应的关系,且该信息为频域信息,在时域上的随机噪声对频域信息影响很小,因此利用这种方法可以非常准确地得到目标自旋频率,进而可得到目标角速度数值。
当探测距离为50km,目标自旋频率为2Hz时,时频谱仿真结果如图4(a)所示。由图可知,图像重复频率为2Hz,换算可得目标自旋角速度为4π rad/s。当目标自旋频率变化时,对应时频谱频带宽度以及重复频率将随之改变,图4(b)和图4(c)分别是自旋频率为1Hz和0.5Hz且探测距离为50km的结果,与图4(a)类似,可分别得到图像重复频率为1Hz和0.5Hz,对应角速度分别为2π rad/s和π rad/s。
根据图4可知相同探测距离情况下,目标自旋频率越小,时频谱频带宽度越小,重复频率也越小,且计算结果与仿真设定值完全一致。

图4 仿真时频谱图 (探测距离50km)Fig.4 Time-frequency spectrum simulation diagram(detection range 50km)
图5是探测距离为500km时,自旋频率分别为2Hz、1Hz和0.5Hz情况下的仿真结果;图6是探测距离为1000km时,自旋频率分别为2Hz、1Hz和0.5Hz情况下的仿真结果。
对比图4、图5和图6可知,探测距离增加会导致回波信号信噪比降低,对时频分析造成不利影响,但是仍能正确获得目标自旋频率参数值,亦可正确得到目标角速度数值。


图5 仿真时频谱图 (探测距离500km)Fig.5 Time-frequency spectrum simulation diagram(detection range 500km)
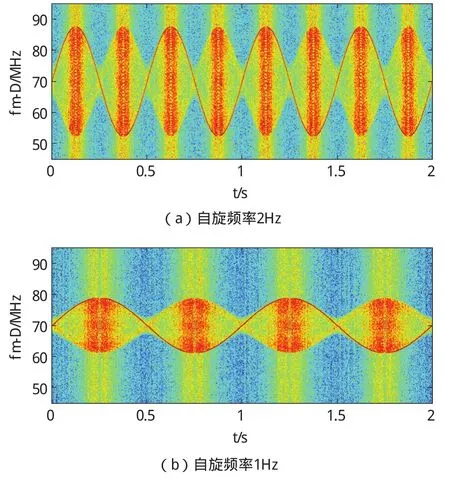

图6 仿真时频谱图 (探测距离1000km)Fig.6 Time-frequency spectrum simulation diagram(detection range 1000km)
对于1m直径的空间碎片仿真结果汇总在表2中,可见激光微多普勒探测对于直径1m的空间碎片的探测距离在50km、500km以及1000km时,探测距离精度分别达到5m、10m和20m,角速度探测精度分别达到0.02rad/s、0.03rad/s和0.10rad/s,径向速度探测精度分别达到0.5m/s、1m/s和5m/s。探测距离跟目标大小、激光发射功率等条件有关,一般而言,探测距离跟发射功率与目标大小成正比。探测距离越大,信噪比降低,探测精度会下降,实际设计时这两个参数需要平衡。
对于尺寸从0.01~10m的空间碎片激光微多普勒探测仿真结果结果见表2,可见激光微多普勒探测可以实现对于直径小于10m的空间碎片较远的探测距离、较高的距离和速度分辨率,具备对空间碎片的在轨高精度观测能力。
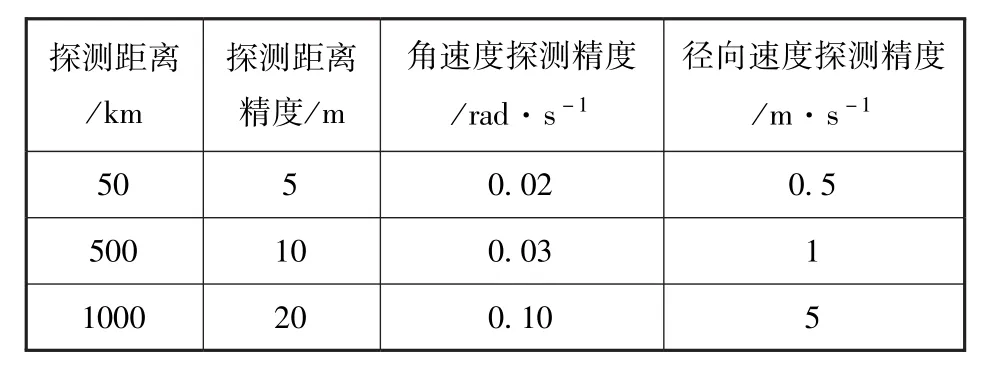
表2 直径1m空间目标激光微多普勒探测仿真结果Table 2 Simulation results of laser micro-Doppler detection for space target with a diameter of 1m
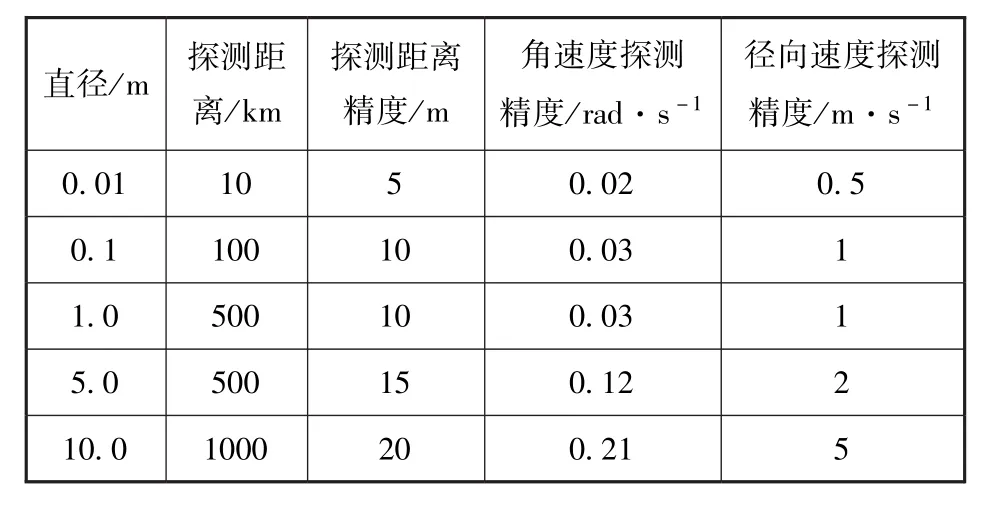
表3 不同直径空间碎片激光微多普勒探测精度仿真结果Table 3 Simulation results of laser micro-Doppler detection accuracy of space debris with different diameters
5 激光雷达天基装备关键技术分析
激光雷达可通过搭载卫星实现在轨运行,通过设计合适的固定轨道或者实施变轨动作,可以实现对空间目标如近地小行星、空间碎片及其他空间目标的在轨监测,如图7所示。由于空间环境不受大气影响,激光没有衰减和波前畸变,可以在1000km以上的较远距离对空间目标进行精确探测和识别,探测目标的多维运动参数,判断目标体积、大小以及材质,预测其运行轨道或者进入大气层轨道,极大提高对空间目标的探测、管理和预警能力。为了实现在轨装备,激光雷达系统还需要解决以下若干关键技术。

图7 天基激光雷达探测空间目标示意图Fig.7 Schematic diagram of space target detection by space-based LIDAR
(1)系统小型化技术
现在的原理样机系统镜头口径、长度和重量分别为200mm、400mm、10kg,考虑到对空间探测距离至少要1000km以上,再加上对探测分辨率的要求,在轨运行的系统出瞳孔径至少要达到500mm,再加上和红外、可见光相机复合,系统体积和重量相较目前的系统要增大很多。所以在光学设计上要尽可能采用共窗口和共光路技术,以尽可能减少光学元件的使用数量,减低系统的体积和重量。
(2)抗空间辐照加固技术
由于激光探测系统涉及激光器以及信号处理电路容易受到空间辐照的影响产生性能衰退和失效现象,激光雷达上天需要进行专门的器件及系统抗空间辐照加固,确保激光器和处理电路长期正常工作。这就需要从激光制造、电路设计与制造入手,做针对性的技术加固设计以及大量的地面验证试验,确保系统上天运行的可靠性。
(3)弱暗目标激光回波参数提取算法
利用激光微多普勒效应探测空间目标,距离向分辨率与脉冲宽度成正比,需要从探测回波中提取目标信息的有用回波,用于目标图像重构。空间大气环境相对纯净,大气影响可以忽略不计。由于目标距离远、回波弱、还需要考虑空间辐照对信号电子设备带来的噪声影响等因素,需要建立各种探测影响因素对回波信号的调制模型,研究相应的信号降噪和解调算法,用以恢复出包含在激光回波信号脉冲内部的目标反射调制量,实现对激光回波脉内目标调制信息的有效提取,提高探测精度。
(4)激光-红外-可见多通道复合设计技术
激光微多普勒激光雷达的视场角目前只能做到0.2mrad,意味着目标识别空间范围较小,只能在锁定目标才能以后完成目标探测。需要和红外和可见光相机系统进行复合,在大视场角光学相机完成目标搜索和跟踪以后,利用共轴的激光雷达在进行激光微多普勒效应进行目标探测,这就需要解决多通道光学系统共口径和共光路等技术问题。
6 总结与建议
利用激光微多普勒效应探测空间目标利用激光探测波长短、分辨率高的特点,可以实现对空间目标的径向运动速度、翻转和旋进角速度进行精确探测。本文通过对直径0.01m、0.1m、5m和10m空间碎片进行建模及仿真计算,表明激光微多普勒效应可以实现对直径10m以下的小尺寸空间碎片实现较远的探测距离,较高的探测、距离速度分辨率和角速度分辨率。如果实现在轨装备,激光微多普勒雷达还需要解决系统小型化、抗空间辐照加固技术、弱暗目标激光回波参数提取算法、激光-红外-可见多通道复合设计技术等关键技术。未来随着激光器技术发展,激光微多普勒雷达的探测距离和探测精度还可以继续提高,完全具备在轨装备条件,通过与其他空间目标观测手段一起组网运行,可以提供包括空间碎片、小行星以及其他空间目标的精确多维运动和目标特征参数,提升国家对空间目标监测、预警以及管理能力。