道岔运维质量管理系统架构及功能分析
2022-07-06吴冕关宏
吴 冕 关 宏
(苏州市轨道交通集团有限公司运营一分公司,215101,苏州∥第一作者,工程师)
道岔转辙设备作为道岔控制系统中安装在室外的执行机构,用以可靠地转换道岔位置,改变道岔开通方向,锁闭道岔可动部分,是反映道岔位置的重要的信号基础设备。
目前,对道岔转辙设备状态的监测,主要通过浏览MSS(维护监测系统)子系统中的道岔转辙设备动作电流曲线、功率曲线和电压曲线等获取信息,并与参考曲线相对照,以此掌握设备运用状态。但此方式常取决于维护人员的经验,难以应对道岔转辙设备复杂工作环境中的种种状况,且该方式属于故障修范畴,只有故障特性真正显现出来后才会被发现并进行处理,难以形成系统、有效的设备维修和维护计划。通过道岔运维质量管理系统可对设备进行综合实时监测,借助该系统中的专家级趋势分析功能,可实现道岔转辙设备状态修。
1 道岔运维质量管理系统架构及功能
道岔运维质量管理系统主要由道岔综合监测系统、道岔数据管理系统和道岔维修管理系统三大部分组成。其物理架构和功能架构如图1~2所示。
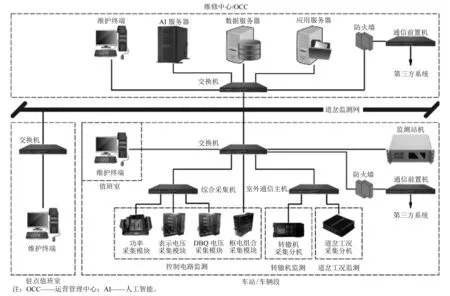
图1 道岔运维质量管理系统物理架构Fig.1 Physical architecture of turnout operation and maintenance quality management system
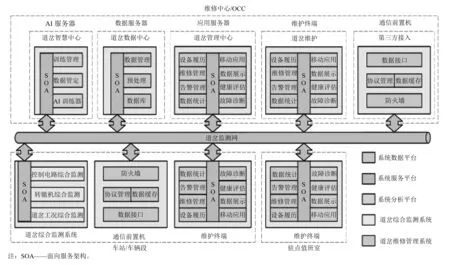
图2 道岔运维质量管理系统功能模块Fig.2 Function module of turnout operation and maintenance quality management system
1.1 道岔综合监测系统架构及功能
道岔综合监测系统(TIMS)部署于车站信号设备室和轨旁,实时采集道岔控制电路、转辙机和道岔工况的各种状态参数。其架构如图3所示。
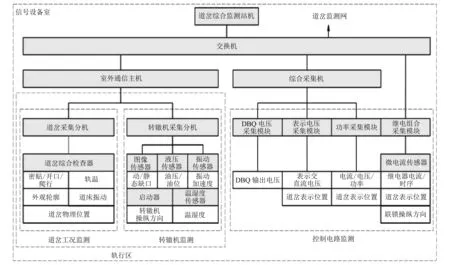
图3 道岔综合监测系统架构示意图Fig.3 Schematic diagram of turnout comprehensive monitoring system architecture
1.1.1 道岔控制电路监测
道岔控制电路监测包括继电状态监测、DBQ(断相保护器)状态监测、表示电路监测、转换功率监测、道岔位置冲突监测等。
1) 继电器状态监测:其原理主要包括以下三方面。
(1) 继电器励磁、自闭、接点回路直流电流变化曲线采集:主要通过继电组合采集模块控制微电流传感器实现数据采集。其原理示意图如图4所示。

图4 继电器回路电路采集原理示意图
(2) 继电器动作时长采集:继电器励磁、落下动作时长的采集,是通过对继电器励磁回路电流及接点回路电流进行监测,并计算出继电器的转换时间参数,包括:①继电器励磁动作时间(励磁开始中接点离开下接点到中接点与上接点闭合的时间);②继电器落下动作时间(励磁结束中接点离开上接点到中接点与下接点闭合的时间)。继电器动作时长的监测主要用于继电器状态的评估分析与动作计数。
(3) 继电器接点状态监测:通过对继电器接点回路电流的连续采集,获取电流的连续变化曲线;通过分析继电器接点转换过程中电流曲线的变化,获取接点表面接触状况的变化情况,并实现接点状态在线报警。
2) 转换功率监测:是对转辙机转换过程的电流、电压和功率进行监测。由加装于道岔组合(或电子板卡驱动模式下的道岔控制线)上的功率传感器,连续采集转辙机转换过程的启动电流、电压和功率,并上传至道岔综合采集机,形成转辙机电流、电压和功率曲线。功率的采集方式包含继电组合电路和电子板卡电路两种。
(1) 继电组合道岔控制电路功率采集方式:其原理示意图如图5所示。该采集方式通过高阻型功率传感器完成。电压从DBQ的11、31、51端子采集,电流采用钳型互感器在DBQ的21、41、61端子输出线上采集。
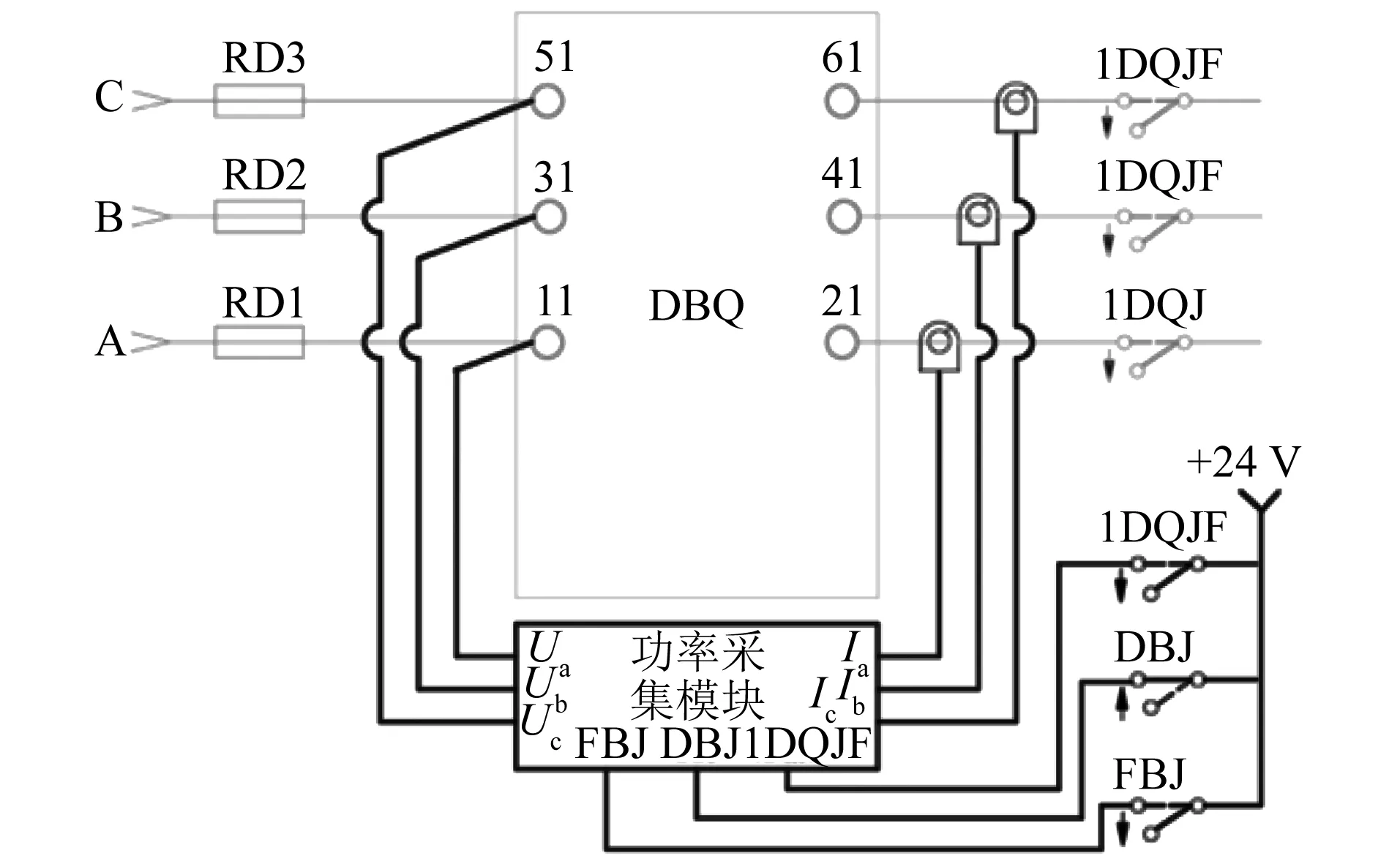
图5 继电组合道岔控制电路功率采集原理示意图
(2) 电子板卡道岔控制电路功率采集方式:其原理示意图如图6所示。该采集方式通过高阻型功率传感器完成。电压从X1、X2、X3线上采集,电流采用钳型互感器从X1、X2、X3线上采集。
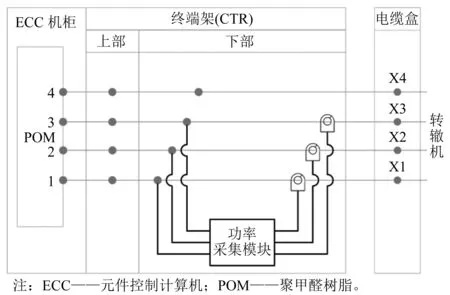
图6 电子板卡道岔控制电路功率采集原理示意图
1.1.2 道岔位置冲突监测
道岔控制电路根据联锁电路控制的 DCJ、FCJ 的上接点控制转辙机的操纵方向和时机。转辙机的操纵方向决定了道岔的物理位置。为避免配线错误导致的道岔表示位置与实际位置的冲突,需核对道岔控制电路的联锁操纵方向(道岔表示位置)与转辙机操纵方向(道岔物理位置)。
道岔位置冲突监测利用继电组合监测中获取的 DCJ、FCJ 励磁电流判断联锁系统的道岔操纵方向;利用 DBJ、FBJ 状态识别道岔表示位置;利用缺口监测中获取的转辙机启动电流判断转辙机的操纵方向,并根据上述条件比对联锁道岔操纵方向和转辙机操纵方向,当二者不一致时,发出道岔位置冲突报警。道岔位置冲突监测逻辑如图7所示。

图7 道岔位置冲突监测逻辑图Fig.7 Logic diagram of turnout position conflict monitoring
1) 道岔转辙机监测:道岔转辙机监测包括静态缺口监测、缺口晃动量监测、箱盒内环境监测、内锁闭装置监测和视频监测等。
缺口监测主要是通过转辙机内安装的图像采集设备进行监测。该设备利用目标锁定、特征提取和灰度分析等图像处理技术,通过将现场采集的图像与存储的缺口位置进行比对,直观反映道岔转辙设备缺口状态。缺口监测包括三种启动模式,根据优先级依次为:操纵后缺口≥过车后缺口≥周期采集缺口,高优先级业务将会中断低优先级业务。以ZDJ9型道岔转辙设备为例,其缺口监测原理示意图如图8所示。
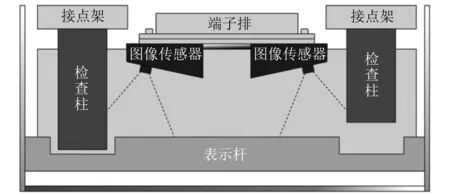
图8 ZDJ9型转辙机缺口直拍示意图Fig.8 Schematic diagram of ZDJ9 type switch machine notch shot
箱盒内环境监测主要包括道岔转辙设备振动监测和温湿度监测。通过转辙机内安装的振动传感器和温湿度传感器,实时采集设备内的三方向振动加速度和温湿度情况,并形成相应曲线,进行动态对比分析。
2) 道岔工况监测:主要监测道岔几何尺寸(密贴/开口/爬行/轨距/基本轨横移)、道床振动、轨温、道岔转换速度和尖轨结构件外观缺陷等。道岔工况监测设备包括道岔综合检查器、道岔采集分机、通信模块和道岔启动器,与缺口监测共用通信与供电通道。道岔综合检查器安装于道床中央,为非接触式测量模式,利用激光测距原理,通过检测投射到尖轨、基本轨上的激光变化,测量基本轨、尖轨纵、横两个方向的相对位移,从而计算道岔的密贴、开口、轨距、基本轨横移和钢轨爬行等技术参数。
1.2 道岔数据管理系统构架和功能
道岔数据管理系统(TDMS)由系统数据平台、系统服务平台和系统分析平台三部分组成,负责道岔数据预处理与存储、SOA数据路由服务、道岔故障诊断与预测分析等。其系统架构如图9所示。
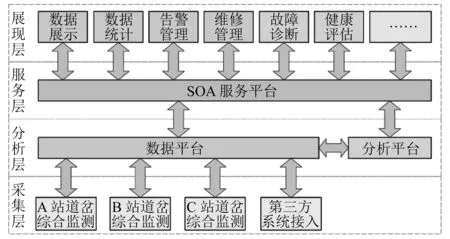
图9 道岔数据管理系统架构示意图
1.2.1 系统数据平台
系统数据平台利用统一定义的接口和协议,接收道岔综合监测系统的各类道岔监测数据,建立道岔综合监测数据池;利用统一定义的接口和协议,与第三方系统(MSS/CSM(信号集中监测系统)/智慧运维/缺口监测等)进行道岔相关监测数据的交互,实现既有监测资产的合理整合与应用;利用统一定义的接口和协议,将现场维修时使用的各种道岔测试仪器的数据导入数据平台存储,实现道岔维修过程数据的综合管理与应用。
系统数据平台对来自于不同监测系统的道岔监测数据进行预处理,通过数据清理、数据集成、数据规约和数据变换,获得标准的、干净的和连续的道岔状态数据,支撑系统的数据展示、数据分析和数据统计。其架构如图10所示。
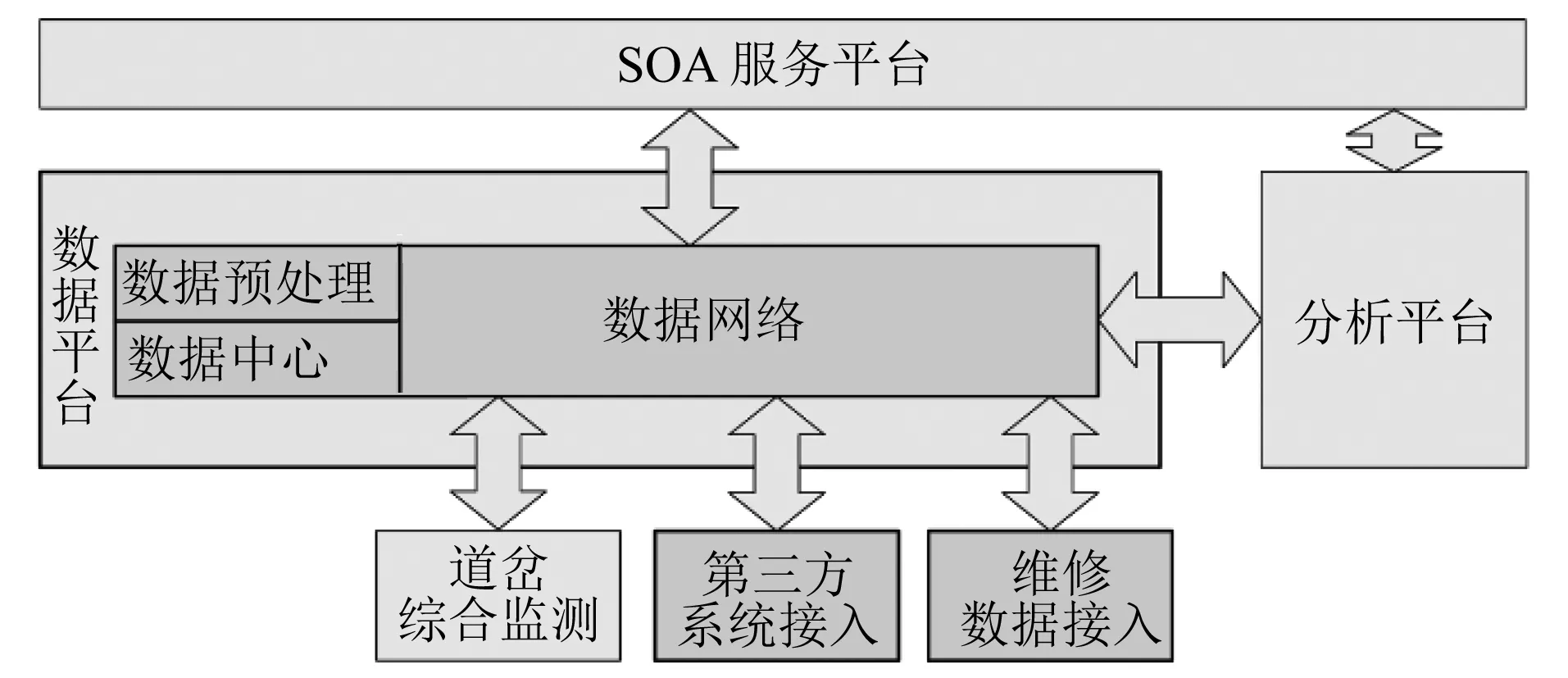
图10 系统数据平台架构Fig.10 System data platform structure
1.2.2 系统服务平台
系统服务平台采用SOA(面向服务架构)技术,构建系统的数据路由平台,将传统系统软件的每个功能拆分为单个的独立服务组件,利用统一定义的接口和协议进行组件间的数据交互,构建一个可以分布式部署的道岔综合监测服务平台,支撑系统的数据交互与应用。
SOA架构的接口采用中立的方式进行定义,独立于实现服务的硬件平台、操作系统和编程语言,使得构建在各种各样的系统中的服务可以以一种统一和通用的方式进行交互,各种服务组件(功能)可分布式部署,随意组合使用,使得系统可以从容应对不同功能(服务组件)的部署变化。SOA系统服务平台架构如图11所示。
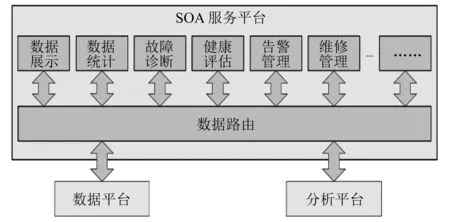
图11 SOA系统服务平台架构Fig.11 Architecture of SOA system service platform
1.2.3 系统分析平台
系统分析平台主要负责道岔故障成因自动诊断、设备健康状态预测分析与健康分级。该平台主要利用各型道岔故障树软件,对开关量、状态等非离散型道岔数据进行分析,自动诊断道岔故障;利用人工智能训练器、执行器软件对曲线等离散型道岔道岔故障样本数据进行训练学习,进而实时对曲线类离散数据进行分析,自动诊断道岔故障;利用人工智能训练器软件,对道岔正常工作参数和曲线进行散布范围和包络线分析,进而实现道岔健康度分析与设备健康等级划分。
系统分析平台分为数据建模管理、AI(人工智能)训练器、故障诊断组件和健康评估组件等部分,其架构如图12所示。
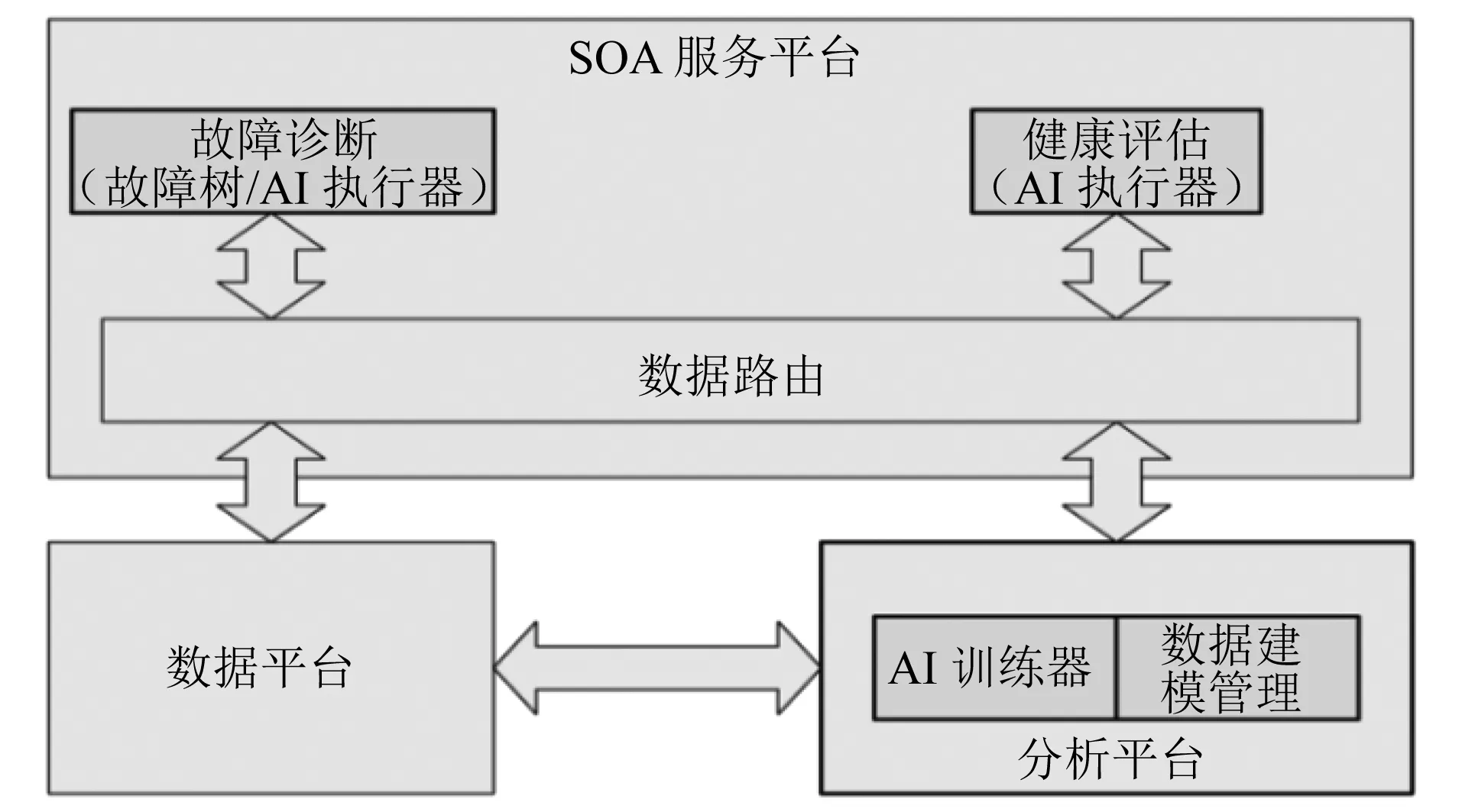
图12 系统分析平台架构Fig.12 System analysis platform architecture
1.3 道岔维修管理系统架构及功能
道岔维修管理系统(TMMS)利用互联网技术,建立基于内网的道岔维修管理运行平台,实现道岔维修计划、作业信息、资料查询、维修数据记录和道岔履历等数据展示与查询。该系统配备安全型无线模块,建立了轨旁、信号设备室和值班室等工作场景的安全型内网移动通信,可为专用移动终端提供数据传输支持能力;结合各种配套开发的工具与模块,可实时记录维修工作过程中的维修行为,为道岔的智慧维修管理提供基础数据保障。
道岔维修管理系统包括桌面端和移动端两部分,综合展示道岔各类设备、各个维度的监测数据。通过移动终端、轨旁无线模块和无线测试仪表等辅助设备,以及桌面/移动维修管理软件实现维修作业过程的监测数据浏览、维修行为监督、作业数据记录与设备报警查询。可查询项目主要包括道岔设备及维修人员定位管理、监测数据移动查询、设备状态报告查询、道岔维修(检修)流程管理、问题记录、维修指导查询、维修质量评估、道岔设备履历、超限报警、故障报警、健康状态报警、道岔表示位置与物理位置冲突报警等。
移动终端可以在工作区域通过安全型无线AP(无线接入点)接入轨旁监测网络,访问轨旁采集分机和室内监测站机,获取全部监测信息及分析信息。
道岔维修管理系统架构如图13所示。
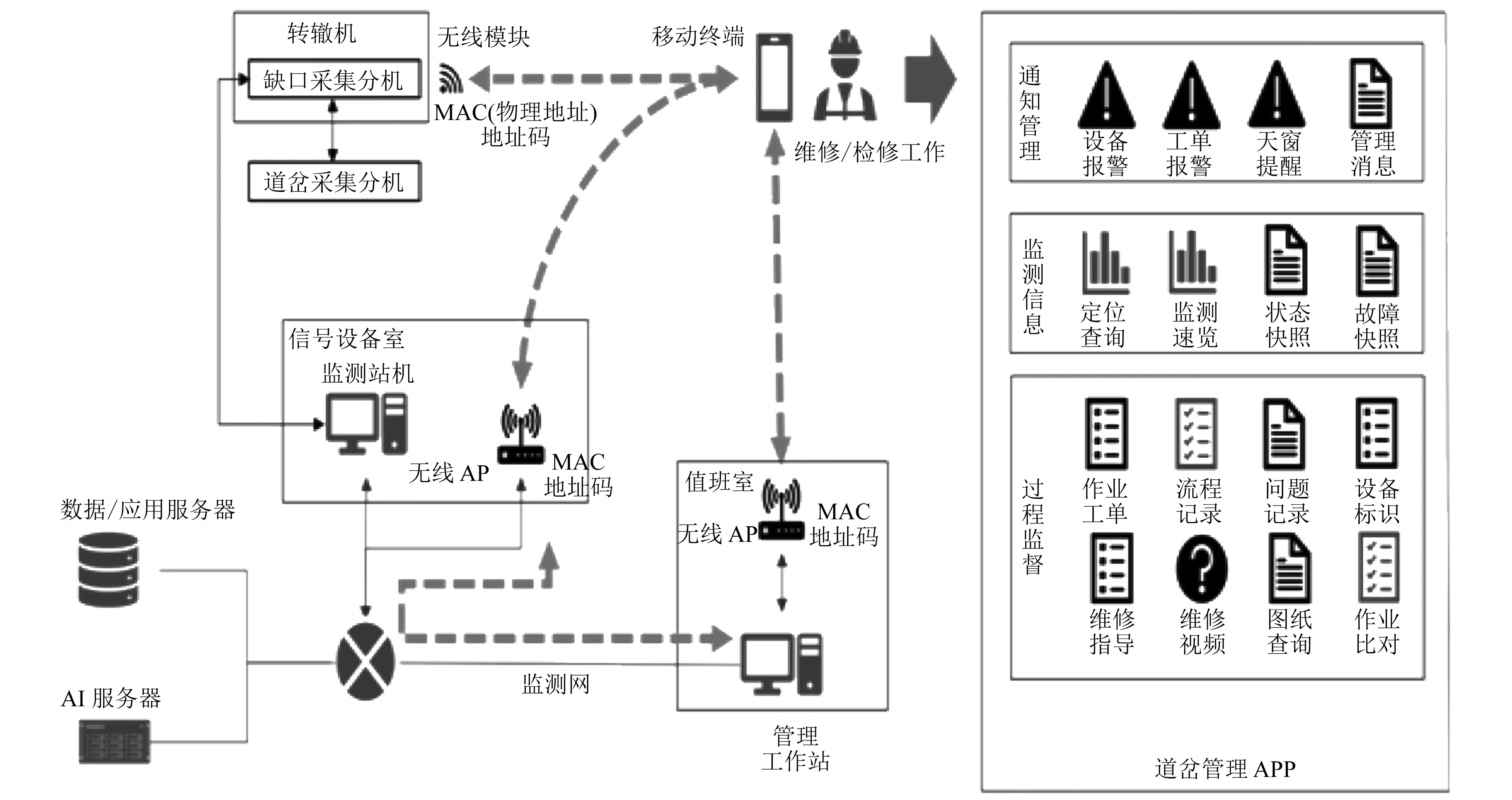
图13 道岔维修管理系统架构Fig.13 Turnout maintenance and management system architecture
2 道岔运维质量管理系统应用
道岔运维质量管理系统监测所得的道岔动作功率曲线,能够直接反映转辙机实际输出力。道岔运维质量管理系统可以根据道岔功率大小、功率波动的时间点确定转辙机或道岔工作状态、故障模式及故障相对部位,给出相应故障点指向及维修建议。
1) 道岔功率曲线异常故障分析:可根据道岔运维质量管理系统采集的道岔转辙设备各阶段功率曲线,分析道岔转辙设备可能出现的问题及相关维修建议。道岔运维质量管理系统可为设备设置有参考曲线,方便使用时更清晰直观地观察道岔功率曲线的稳定性。正常情况下,转辙机整个动作过程功率曲线较为平滑。非正常情况下,功率曲线会出现“坡起”,结合转辙机动作过程区段划分,如“坡起”功率曲线位置处于动作区,即可判断出此时转辙机动作需要克服的阻力为转辙机内阻、道岔两尖轨转换阻力。此时,道岔运维质量管理系统给出设备故障的可能原因有:道岔机械部分阻力过大、缺油,转辙机内部别卡或内阻过大。维护人员可根据系统建议对设备进行相应处置,以保证设备正常工作。
2) 道岔故障处理指导功能:基于历史故障处理经验,可对设备故障报警提供维护建议,维护人员可根据系统建议定位故障并处理,有效提升了设备维护效率。如根据道岔功率曲线及工作电流图发现A、B、C三相电均缺相,转辙机不动作。对于该故障报警,系统提供的故障原因及维修建议为:交流转辙机电源断,建议检查转辙机电源;启动空开跳,建议检查启动空开;DBQ故障,建议检查DBQ的A相输出电压是否为零,如为零,则为DBQ故障。
3 结语
道岔运维质量管理系统可提高运维效率和管理效益,同时能够达到一些目的:
1) 提升精细化维修水平。通过集成化的监视、分析和闭环处理,可逐步实现基于状态修的维护模式转变。
2) 能够实时掌握道岔转辙设备状态和及时发现故障隐患,并能通过专家智能诊断和大数据分析实现故障快速诊断定位和提前预警,提升抢险抢修及时性和处置合理性。
3) 通过道岔转辙设备监测记录设备在线使用情况,可实现设备全寿命周期管理,降低设备维修成本。
