星载激光测风技术体制及其评估方法综述
2022-07-06孙学金张传亮方乐陆文赵世军叶松
孙学金,张传亮,,方乐,陆文,赵世军,叶松
1.国防科技大学气象海洋学院,南京 211101;
2.61741部队,北京 100081
1 引言
风是描述大气状态的基本参量之一,全球范围内大气风场的探测对于研究中尺度动力学过程、大气输送和交换作用以及极端天气的预报预防等具有重要意义(Baker 等,1995)。从20世纪70年代起,人们就开始对风场卫星探测技术进行研究。1971年Endlich 等(1971)通过提取云的特征量实现了卫星云导风的探测。Leese 等(1971)通过引入快速傅里叶变化技术,提高了云导风的计算速度。许健民等(1997)对云导风计算的相关问题开展了研究。王振会和曾维麟(1996)、朱平等(2007)、龙智勇等(2011)、马侠霖等(2014)进一步发展了云导风的处理算法,提高了云导风的计算效率和业务化应用。目前云导风的探测技术已经比较成熟,然而该技术只能实现有云大气层的单层风信息的提取。同时,人们也发展了利用微波辐射计、微波散射计获取海表风场的技术。1978年,美国发射的SeaSAT 装载了微波辐射计载荷,初步实现了海面风速的遥感(Njoku等,1980)。后来人们在传统微波辐射计的基础上,引入了对于电磁波第三、第四Stokes分量的测量,使得探测海面风速风向成为可能。2003年,第一台星载全极化微波辐射计WindSat 发射升空,成功实现了海表风速和风向的遥感(Gaiser 等,2004)。欧洲空间局研制的SMOS(Soil Moisture and Ocean Salinity)也搭载了极化微波辐射计,实现了海面风场的探测(Barre 等,2008)。在国内,中国航天科技集团公司第504 研究所(王晓海和李浩,2005)、解放军理工大学(施健康等,2009;陆文等,2010;严卫等,2010)等单位也对全极化微波辐射计的设计和应用展开了深入研究,并取得了丰硕成果。然而,星载微波辐射计只能实现全球海表风场的探测,无法实现空中风场的廓线探测。在星载激光测风雷达发射之前,探测空中风场廓线的主要手段包括无线电探空仪和风廓线雷达,然而无线电探空仪站点主要分布在北半球的陆地地区(Atlas等,1985),南半球、赤道地区以及海洋分布较少,无法实现全球风场廓线的有效和持续探测。世界气象组织将全球三维风场的探测视为21世纪最具挑战性和最有意义的气象观测任务之一(WMO,2001)。
通过对不同卫星测风技术的研究,星载激光测风雷达被认为是探测全球风场的最佳手段。Abreu(1979)首次提出在卫星或者空间站上搭载激光测风雷达进行全球风场探测的概念,并研究了雷达参数对测风精度的影响。1985年,美国启动了大气风场探测计划LAWS(Laser Atmospheric Wind Sounder),开展了2 μm 相干激光多普勒雷达的相关技术研究,该项目由于受制于当时技术条件的限制而被迫搁浅(Beranek 等,1989)。经过20 多年的探索,美国于2007年再次启动星载激光雷达测风计划:全球风场探测系统GWOS(Global Wind Observing System),采用直接探测和相干探测的混合技术体制的多普勒激光测风雷达HDWL(Hybrid Doppler Wind Lidar)实现全球风场的探测,目前该项目已推迟发射(Baker,2008)。欧空局对于星载激光测风雷达的研究也起步较早,可追溯至20世纪80年代,并于1999年正式启动大气动力学任务ADM-Aeolus ADM (Atmospheric Dynamics Mission),并计划搭载基于直接探测体制的星载激光测风雷达ALADIN(Atmospheric LAser Doppler INstrument)来实现全球风场的探测。最早计划于2007年发射,后因激光器和望远镜等硬件方面的技术难题几经推迟(Wernham 等,2016)。2018年8月22日(世界时),Aeolus 卫星顺利升空,对于人类全球风场廓线的探测具有里程碑式的意义。1998年日本开始研制运行于国际空间站上的相干激光多普勒测风雷达JEM/CDL(Japanese Experiment Module/Coherent Doppler Lidar)(Itabe等,2001)。2011年日本又开展了运行于独立卫星轨道的相干多普勒激光测风雷达CDWL(Coherent Doppler Wind Lidar)的研究,该技术体制可实现边界层和云场内部风场的探测(Baron 等,2017;Ishii等,2017)。
欧洲空间局、美国和日本都投入了大量人力、物力、财力积极探索和研制星载激光测风雷达,提出了3种不同的技术体制。本文通过大量调研相关文献简要概述了欧洲空间局、美国和日本的星载激光测风雷达技术体制,并从数据获取率和获取量、风场探测精度以及对数值预报系统的改善效果3个方面对这3种技术体制进行了评估和论证。
2 星载激光测风技术体制
本节分别对欧洲空间局Aeolus、美国HDWL和日本CDWL 研制的星载激光测风技术体制进行介绍。
2.1 欧洲空间局Aeolus技术体制
欧洲空间局研制的Aeolus 星载激光测风技术体制如图1所示(Marseille 和Stoffelen,2003;Reitebuch 等,2006)。卫星拟运行在400 km 高度的太阳同步晨昏轨道上,以减小太阳背景辐射对测风精度的影响(Zhang 等,2019)。后来为了增加回波信号的信噪比,将轨道高度调整至320 km。卫星观测天顶角为35°。Aeolus 激光雷达工作在355 nm 波段,采用直接探测技术分别通过Rayleigh通道和Mie 通道进行大气风场的探测,其中Rayleigh 通道主要以大气分子为示踪物探测对流层和平流层下层的大气风场,Mie 通道主要以气溶胶和云滴粒子为示踪物探测边界层和云内风场。欧洲空间局对Aeolus 风场探测的垂直分辨率和精度要求如表1所示。为了提高测风精度,Aeolus 探测单元需累积若干个激光束后再进行径向风速的反演,其中一次测量(measurement)过程累积的激光脉冲为20个,一次观测(observation)是由30次测量组成的,造成的一次观测过程的水平分辨率约为90 km。
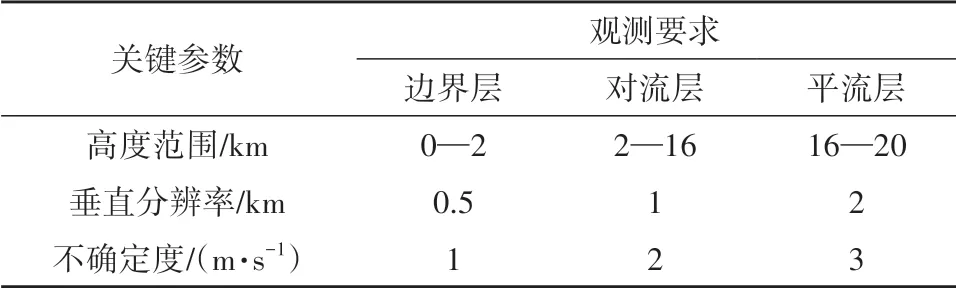
表1 欧洲空间局对星载激光雷达测风不确定度的要求Table 1 The observation accuracy expectation of ESA for spaceborne DWL
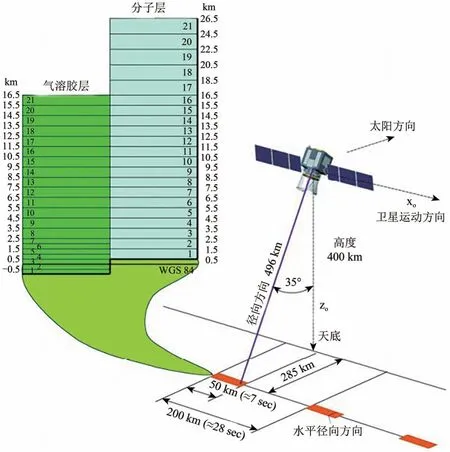
图1 Aeolus激光测风技术体制(Reitebuch等,2006)Fig.1 The technical system of spaceborne DWL Aeolus(Reitebuch et al.,2006)
Aeolus 的系统结构如图2所示,系统主要由激光器、发射接收系统和鉴频系统组成,其详细工作流程参见张日伟等(2014),本文进行简要描述。首先,激光器产生355 nm 的激光,并发射到大气中,大气中分子、气溶胶或云滴粒子通过后向散射作用将部分激光信号散射回激光雷达。气溶胶和云滴粒子的后向散射信号进入到Mie通道鉴频器中,即Fizeau干涉仪。不同频率的回波信号会在Fizeau干涉仪不同位置产生干涉条纹。鉴频系统通过条纹形成的位置反演气溶胶和云滴粒子回波信号的多普勒频移。大气分子的后向散射信号会进入到Rayleigh 通道鉴频器中,Rayleigh 通道鉴频器由2 个F-P 标准具组成。回波信号一部分进入F-P 标准具1,并在相应位置处的CCD 探测器上形成亮斑,另外一部分信号反射进入到F-P 标准具2中,在CCD探测器上形成另外一个亮斑。不同频率的信号产生的两个亮斑的相对亮度会产生变化,鉴频系统通过两个亮斑之间的相对亮度差异反演大气分子回波信号的多普勒频移。欧洲空间局完成了星载激光测风雷达关键部件,包括激光二极管、发射系统以及光子探测器等的主要技术攻关工作,并为星载激光雷达部件设定了相应的技术标准(Zahir和Durand,2011)。
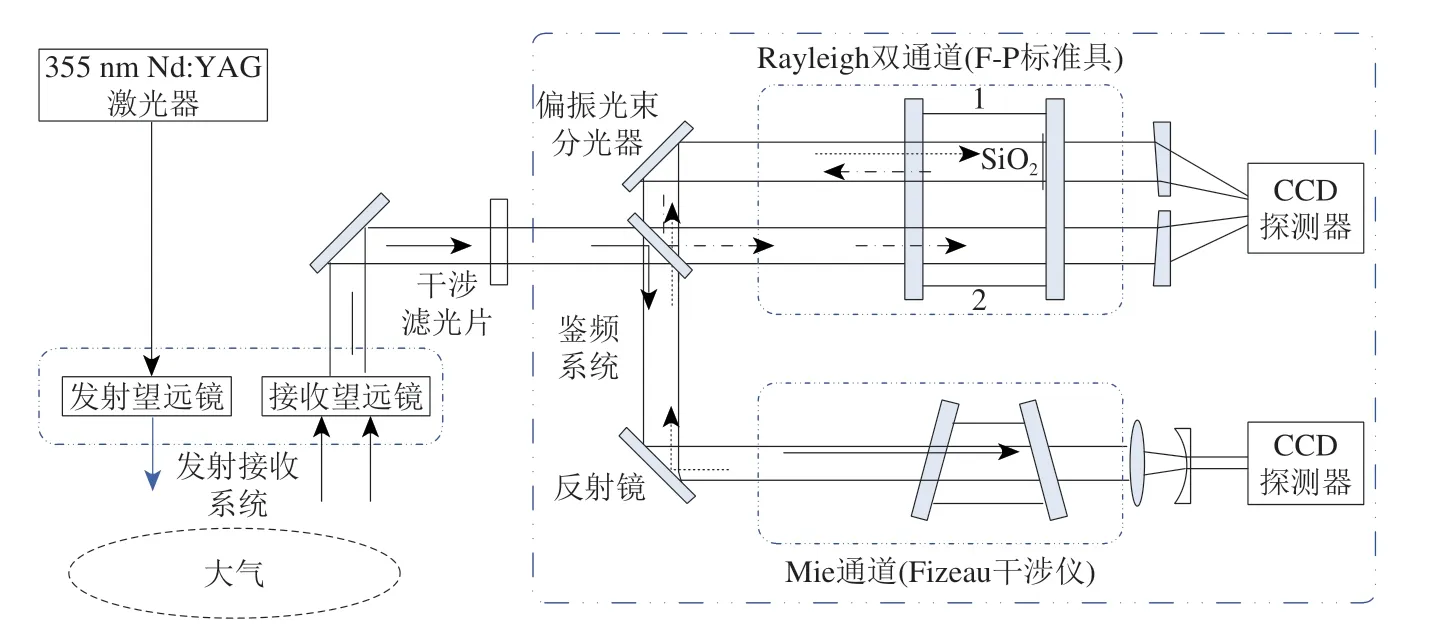
图2 星载激光多普勒测风雷达系统结构图(张日伟等,2014)Fig.2 The system structure diagram of spaceborne DWL(Zhang et al.,2014)
2.2 美国HDWL技术体制
在美国HDWL 技术体制中,卫星拟运行于400 km 高度的太阳同步晨昏轨道。该技术体制采用相干探测技术和非相干探测技术相结合的混合多普勒激光测风雷达方案(Emmitt,2004),其相干探测技术采用的波长为2 μm,非相干探测技术采用的波长为355 nm。与Aeolus不同的是,HDWL可探测多个方向的径向风速值。在不采用望远镜扫描技术的情况下,一个望远镜只能探测一个方向的径向风速值。而望远镜的体积一般较大,以Aeolus 为例,其望远镜直径达1.5 m,如果采用扫描技术的话,会给卫星的姿态控制带来新的挑战。为了探测多个方向的径向风速值,HDWL 拟安装4个不同观测方向的望远镜,其方位角分别为45°、135°、225°和315°,其观测天顶角为45°,如图3所示。Marx等(2013)已经在实验室研制出来由4个望远镜组成的简洁、轻量化的星载激光测风雷达发射接收系统,并且每个望远镜都可以接收355 nm和2 μm 的后向散射回波信号。Masutani 等(2010)基于卫星轨道仿真软件对HDWL 轨道进行了模拟,得到了激光束与地表的交叉点轨迹。模拟结果表示这种观测方式保证了每个探测点都会以不同的观测角度被先后探测两次,从而实现了不同方向径向风速的探测。在进行风速合成时,假设垂直方向的风速分量为0 m·s-1,即可实现二维水平风矢量的探测。

图3 HDWL观测体制示意图(Masutani等,2010)Fig.3 The observation geometry of HDWL(Masutani et al.,2010)
2.3 日本CDWL技术体制
日本CDWL计划是从ISS/JE计划发展而来,二者技术体制比较相似,CDWL 计划在ISS/JE 计划的基础上进行了部分改动。ISS/JE星载激光测风雷达观测方式示意图如图4所示(Ishii等,2012)。ISS/JE 拟在国际空间站上运行,采用相干探测体制,该激光雷达包含两个望远镜,其方位角分别为45°和135°,观测天顶角为30°。CDWL 运行于独立轨道,轨道高度为220 km,并将两个望远镜的观测天顶角调整为35°。其观测方式与美国HDWL 观测方式类似,其前向望远镜和后向望远镜将分别探测同一探测点的径向风场,如图5所示。假设垂直风速为0 m·s-1,可反演大气风场的二维水平风矢量。

图4 ISS/JE观测体制示意图(Ishii等,2012)Fig.4 The observation geometry of ISS/JE(Ishii et al.,2012)

图5 CDWL观测方式示意图(Ishii等,2017)Fig.5 The observation geometry of CDWL(Ishii et al.,2017)
3 星载激光测风雷达技术体制的评估
星载激光测风雷达研发费用比较高昂,所以在发射之前必须对采用的技术体制进行充分论证。针对不同的目的,需要从不同方面进行论证。目前对于星载激光测风雷达主要的评估方法有基于数据获取率和获取量的评估、基于测风精度的评估以及基于对数值预报系统改善效果的评估,本节将对以上3种评估方法进行分别论述。
3.1 基于数据获取率和获取量的评估
全球云的分布是影响星载激光测风雷达数据获取率的关键因素,云滴粒子是星载激光测风雷达探测云内风场的主要示踪物,但由于激光在云中的穿透能力有限,云也是限制星载激光测风雷达对云层以下大气探测能力的重要因子。
目前的星载激光测风雷达可利用分子的Rayleigh 散射信号进行大气风场的探测,也可利用云和气溶胶粒子的Mie散射信号对大气风场进行探测。在晴空大气下,在大部分高度层,星载激光测风雷达主要以分子为示踪物进行大气风场的探测,在边界层,气溶胶数密度较大,星载激光测风雷达主要以气溶胶为示踪物进行大气风场的探测。在有云大气下,星载激光测风雷达可利用云粒子的Mie散射信号探测云内风场,云粒子数密度越大,Mie 散射信号越强,探测的风速越准确,但云粒子同时对激光具有较强的衰减作用,激光在云中的穿透能力取决于单束激光能量和云的光学厚度,如果云的光学厚度较大,星载激光测风雷达则无法探测云层底部以及云层以下的大气风场,所以星载激光测风雷达的数据获取率与云场的分布情况有关。在评估过程中,全球云场模型是否能够代表真实的大气状况至关重要。另外,由于云的分布具有明显的日变化特征(Wood等,2002;Eastman 和Warren,2014;Min 和Zhang,2014),所以星载激光测风雷达的数据获取率还与卫星轨道的升交点有关。同时,数据获取率还与激光测风雷达的探测技术有关,以气溶胶和云粒子为示踪物的相干探测技术可获取约30%的全球风场数据,以分子为示踪物的直接探测技术可获取约70%的全球风场数据(Masutani等,2010)。
与数据获取率相关的量为数据获取量,本文中的数据获取量是指是指径向风速的探测量。假设HDWL 和CDWL 每个望远镜都对应一套独立的激光发射与接收单元,则在激光发射频率一致的条件下,HDWL 和CDWL 测得的径向风速廓线的数量应该分别是Aeolus 的4 倍和2 倍。Masutani 等(2010)的评估实验也验证了这一点,他们基于ISCCP(International Satellite Cloud Climatology Project)全球云场的分布数据库,在相同的轨道参数下,即高度为400 km 的太阳同步晨昏轨道,分别模拟了基于Aeolus、HDWL以及CDWL星载激光测风雷达技术体制的卫星运行情况,并统计了一个月内探测到的measurement 数据量情况,如图6所示。由图可得,3 种技术体制的星载激光测风雷达数据获取量存在较大的差异。其中以分子和气溶胶/云滴粒子为示踪物进行大气风场探测的Aeolus 和HDWL 能够探测边界层至对流层的大气风场。美国HDWL 体制探测的数据量最多,其数据获取量约为Aeolus的4倍,在对流层中下层大气约为日本CDWL 体制的2 倍;由于使用相干探测技术,CDWL体制无法探测对流层上层大气风场情况,只能获取边界层至对流层下层的大气风场,在该高度层内,其数据获取量约为Aeolus的2倍。
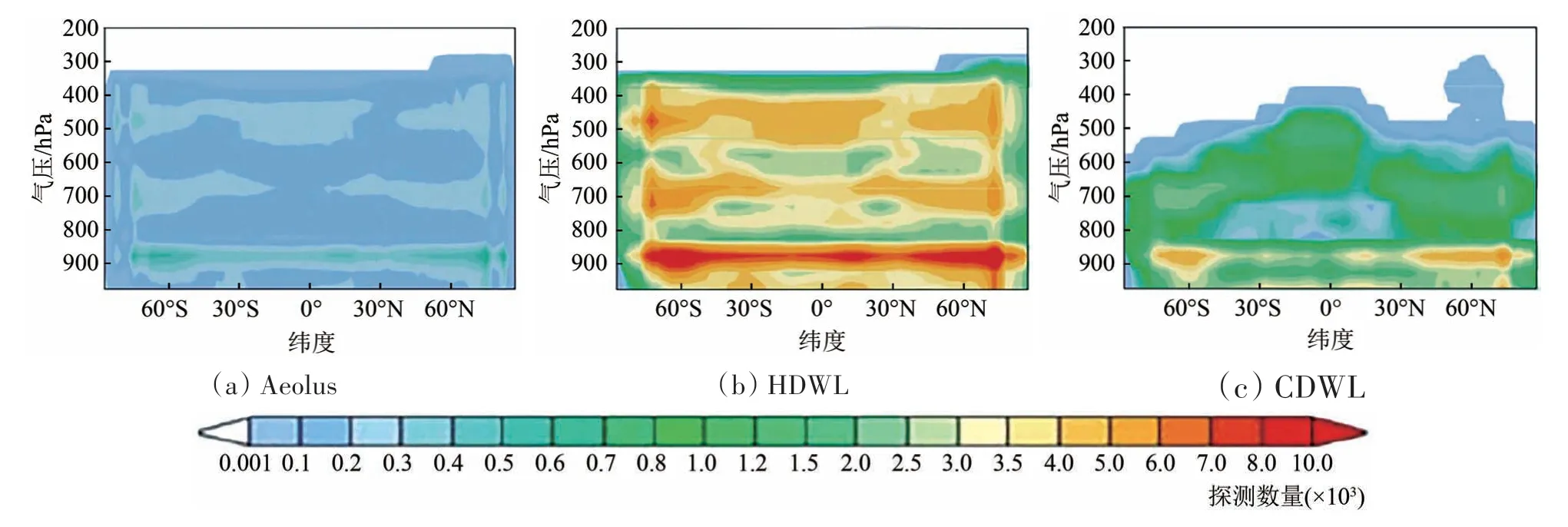
图6 1个月内3种星载激光测风雷达体制的有效探测数量格点分辨率为2.5°×2.5°(Masutani等,2010)Fig.6 The number of measurements obtained from the three technical systems of spaceborne DWLs in a 2.5 grid box(Masutani et al.,2010)
3.2 基于风场探测精度的评估
影响星载激光测风雷达测风精度的主要因素包括泊松噪声和大气不均匀性。泊松噪声,也被称为光子噪声,主要由于光学探测器的量子特性导致的,在星载激光测风雷达探测器将回波信号的能量转化为电子的过程中,探测器上产生的电子数并不等于回波信号的能量所能激发的电子数,而是服从泊松分布(Liu 等,2006;Hasinoff 等,2010;Zhang等,2018)。按照泊松分布的特性,方差等于平均值。如果回波信号的能量等于10000个电子对应的能量,则探测器上产生的电子数的标准差为100 个,其引起的相对不确定度为1%;如果回波信号的能量等于100个电子对应的能量,则探测器上产生电子数的标准差为10 个,其引起的相对不确定度为10%。所以回波信号能量越大,CCD 上产生电子数的相对不确定度就越小,反演的测风不确定度也就越小。由于Mie后向散射回波的能量一般高于Rayleigh 后向散射回波,所以利用Mie 后向散射回波的测风精度一般高于Rayleigh 后向散射回波的测风精度。一般来说,降低泊松噪声对测风精度的影响的方法包括增加激光的发射能量或在探测器上将回波信号能量转化为电子之前累积更多的信号能量,这即是Aeolus的一个“测量值”累积了20个激光束原因。激光发射能量的降低会增加测风的不确定度,Aeolus激光器单束激光能量原计划为80 mJ,发射升空之后由于散热不理想的原因,其最大能量为65 mJ,逐渐降低并最终稳定至50 mJ,导致其Rayleigh通道测风不确定度约为4.75 m·s-1,相比欧洲空间局预期(如表1所示)存在一定差距(Kanitz等,2019;Reitebuch等,2019),但数值预报系统实验表明,该风场探测结果仍然能够较好地改善预报精度(Straume等,2019)。
影响Aeolus 测风不确定度最直接的因素是信噪比,Marseille 和Stoffelen(2003)在计算Aeolus的信噪比时,考虑了泊松噪声的特点,计算公式为
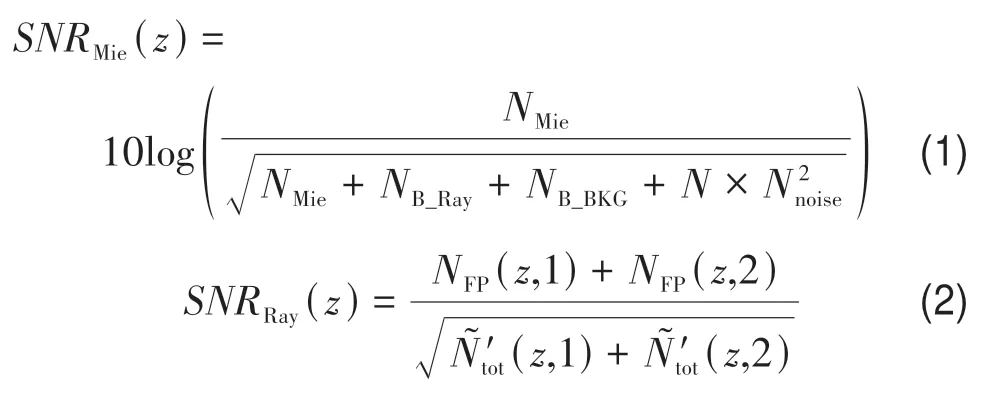
式中,SNRMie(z)和SNRRay(z)分别代表在高度z处Mie 通道和Rayleigh 通道的信噪比。对于Mie 通道,NMie为Mie 通道探测器探测到的总的电子数,NB_Ray为由于串扰作用,Mie 通道接收到的Rayleigh 回波信号激发的电子数,NB_BKG为由太阳背景辐射能量所激发的电子数,N为探测器像元数,对于Aeolus来说,N= 16,Nnoise为探测器暗电流激发的电子数。对于Rayleigh通道,NFP(z,1)和NFP(z,2)分别为F-P标准具1 和2 所接收到的Rayleigh 光谱能量激发的电子数,和分别为F-P 标准具1和2接收到的总信号的能量激发的电子数。
大气不均匀性会也会对测风不确定度产生重要影响(Baars 等,2019;Sun 等,2014)。星载激光测风雷达探测到的风速的垂直分辨率较低,介于250 m—2 km。在数据处理时,默认探测到的风速数据为该高度层几何中心位置的风速,而实际上探测的风速为该高度层的光学重心位置的风速。当大气垂直均匀时,几何中心位置与光学重心位置重合,此时探测到风速的位置是准确的。但是由于大气的垂直不均匀性,该高度层的几何中心与光学重心往往不重合。而且由于垂直风切变是普遍存在的,从而导致了测风误差的产生,统计表明,大气垂直风切变的平均值约为0.01 s-1。Sun等(2014)的研究表明,对于Rayleigh 通道而言,垂直不均匀性导致的Rayleigh 通道测风误差约为0.5 m·s-1,对于Mie 通道而言,垂直不均匀性导致的测风误差约为0.4 m·s-1。一般来说,垂直不均匀性导致的测风误差在Rayleigh 通道可进行修正,但是在Mie通道难以修正。
基于Aeolus、HDWL和CDWL的系统结构,并利用大气光学特性数据库,考虑泊松噪声和大气不均匀性对测风精度的影响,欧洲空间局、美国和日本分别模拟了不同高度处不同质量的风速探测结果所占百分比情况,其中欧洲空间局Aeolus体制测风质量模拟仿真结果如图7所示(Stoffelen等,2005),美国HDWL 体制测风质量的模拟结果如图8所示(Masutani等,2010),日本CDWL测风质量模拟结果如图9所示(Baron等,2017)。
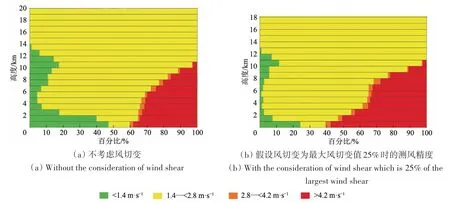
图7 Aeolus测风质量的模拟仿真结果(Stoffelen等,2005)Fig.7 The simulated wind observation accuracy of Aeolus(Stoffelen et al.,2005)
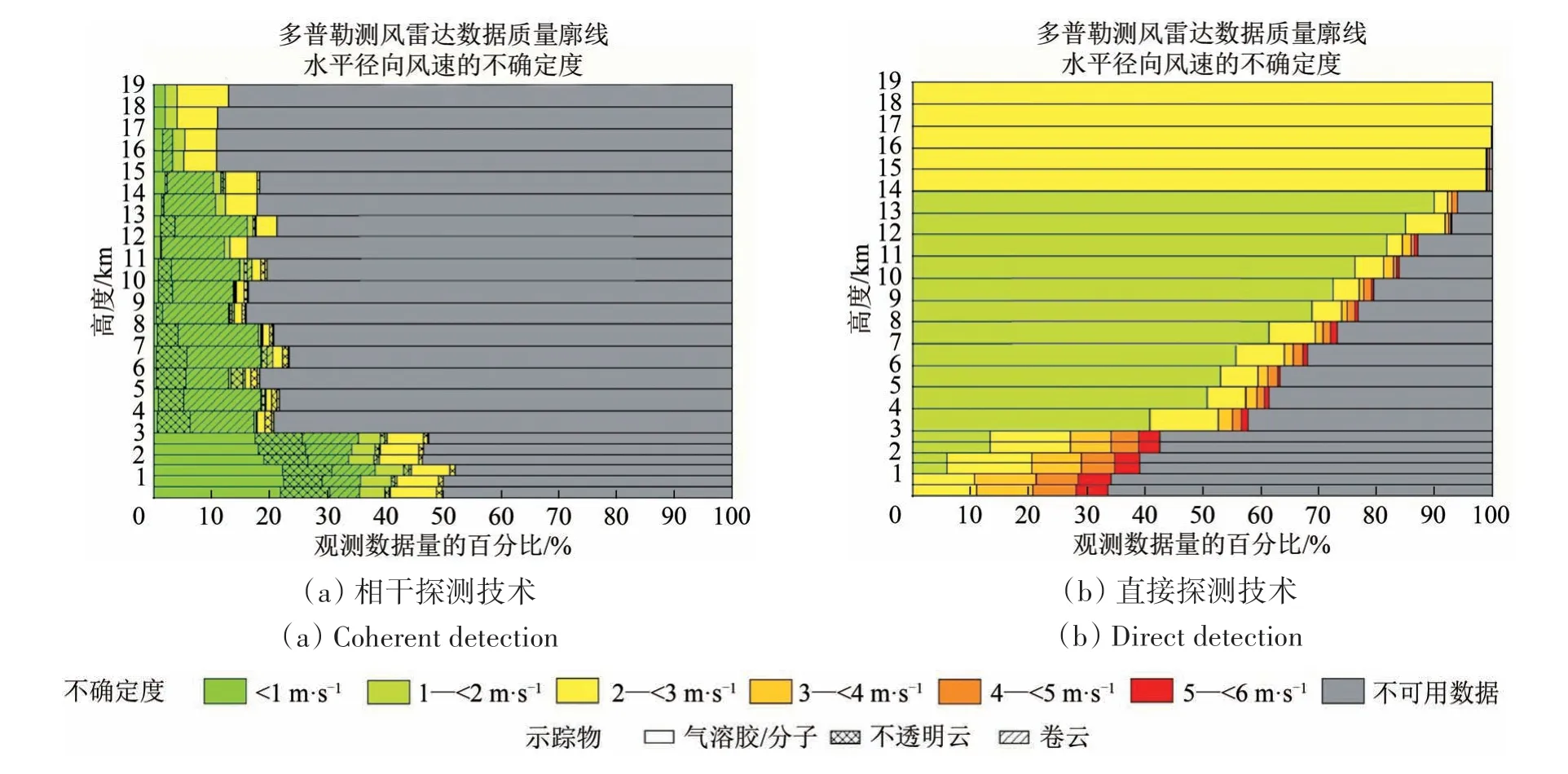
图8 HDWL测风质量的模拟仿真结果(Masutani等,2010)Fig.8 The simulated wind observation accuracy of HDWL(Masutani et al.,2010)
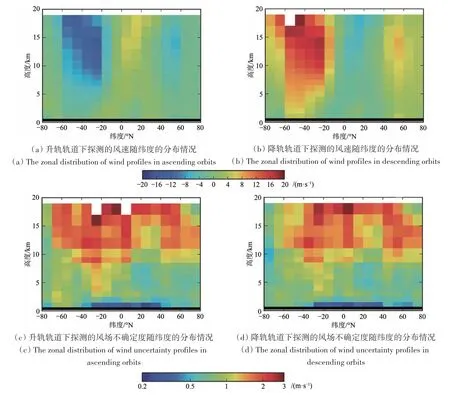
图9 CDWL测风质量模拟结果(Baron等,2017)Fig.9 The simulated wind observation accuracy of CDWL(Baron et al.,2017)
由图7可得,在欧洲空间局Aeolus测风体制下大部分的风速测量值的精度介于1.4—2.8 m·s-1,其高度范围多位于对流层的中高层,主要是Rayleigh通道的探测结果。质量较好的风速探测结果多集中在边界层和对流层底部,主要为Mie通道的探测结果。质量较差的风速测量结果也多集中在在边界层和对流层底部。这主要是由于光学厚度较厚的云的存在,导致激光穿透云层后能量较弱,风场探测结果具有较大的不确定度。对比图7(a)(b)可知,当考虑风切变时,质量较差的风速探测值所占比例明显增加,说明风切变对星载激光雷达的测风质量具有较大影响,这部分测风不确定度主要是由于大气不均匀性导致的。
由图8(a)可得,美国HDWL技术体制下,相干探测测得的风场数据约占观测到总数据的30%,测风精度较高,测风不确定度多介于0—2 m·s-1,少部分测风不确定度介于2—3 m·s-1。其中15 km 以上高度层的探测示踪物主要是气溶胶;3—15 km高度层探测示踪物多为卷云和不透明云;0—3 km高度层的探测示踪物主要是气溶胶。由图8(b)可得,直接探测测得的风场数据约占总数据的70%,其中14 km 以上高度层的测风不确定度多介于2—3 m·s-1,3—14 km 高度层测风不确定度多介于1—2 m·s-1,0—3 km 测风不确定度较大,且不可用数据所占比例较大,这主要是由于激光穿透能力有限所致。结合图8(a)(b)可得,相干探测测风精度较高,但探测范围小,直接探测测风精度低,但覆盖范围广,二者结合可以较好地实现全球风场的探测。
由图9可得,卫星升轨轨道和降轨轨道对应的平均风速大小相近,但是方向相反,存在着互为镜像的关系;在日本CDWL 测风体制下,升轨轨道和降轨轨道测风不确定度的全球分布也比较相似;对于相干测风来说,由于低层气溶胶数密度相对较大,测风精度较高,在中高层大气中,云滴粒子或气溶胶粒子数密度相对较小,测风精度较低,该仿真结果与图8(a)具有一定的相似之处。Baron等(2017)和Okamoto等(2018)的研究表明,对于星载相干激光测风雷达而言,测风不确定度主要与大气不均匀性有关。
3.3 基于对数值预报系统改进作用的评估
OSSE(Observing System Simulation Experiments)系统是评估某个新引入的观测量能否有助于改善数值预报系统精度的有力工具。Rohaly和Krishnamurti(1993)最早使用了OSSE 系统评估了全球风场探测数据是否能够改善数值预报系统的预报结果。OSSE 运行时主要分两步进行,首先利用现有的数值预报系统进行预报,然后将新的观测量同化到预报系统的观测场中,再次进行预报,最后将两次预报结果进行对比,即可评估该观测量对数值预报系统的改善作用(Lahoz 等,2005)。在运行OSSE 之前,为了同化新的观测量,需要对数据同化系统进行重构。另外在同化数据时,观测量的不确定度是一个不可或缺的量,还需建立新观测量的模拟仿真系统以计算其不确定度。所以OSSE实验需要消耗较大的人力和计算力,但相比建立新的观测系统,这些消耗只是其中一小部分。
Stoffelen 等(2006)利用OSSE 系统对星载激光测风雷达能否改善数值预报产品精度进行了评估。在评估时分别使用了两种资料作为观测场,一是无星载激光雷达风场的模式预报资料,二是使用了模式预报资料加模拟的星载激光雷达观测风场资料(Marseille 和Stoffelen,2003;Reitebuch等,2017)。将上述两种资料分别利用4D-Var 技术同化到观测场中进行预报。结果表明,增加了星载激光雷达风场观测资料后,预报模式的结果得到了明显的改善,但是当星载激光雷达测风结果精度较低时,对预报结果产生了副作用。Tan 等(2007)的研究也验证了这一点,而且其结果表明,现在的数值同化系统可从Aeolus 探测的径向风场中提取有用信息,能够减小预报的误差和再分析风场的不确定度。
Masutani 等(2010)使用了OSSE 评估了HDWL获取的风场资料对预报系统的改善作用,在实验过程中使用的风场、温度、气压和湿度等数据取自NCEP 的再分析资料,其中模拟风场资料的系统误差和不确定度是由DLSM(Defense Lidar Simulation Model)基于泊松噪声的原理产生的。实验结果表明,HDWL 对预报系统改善作用的置信度达到95%以上,尤其是在热带地区的高层大气下,改善作用更加明显。
Okamoto 等(2018)评估了CDWL 对预报系统的改善作用,在将风场资料加入到观测场之前,首先利用仿真系统基于气溶胶和云场的观测资料模拟了风场观测量的信噪比、不确定度以及误差,并且评估了极地轨道和热带轨道对预报系统的改善作用,结果表明两种轨道都能较好地改善天气预报的结果。在热带地区,加入星载激光测风雷达全球风场观测资料后,预报相对误差能够减小2%左右。另外该研究表明,低估CDWL 对预报系统改善作用的很大一部分原因是因为不能较好地模拟观测风场的不确定度。
美国和日本的星载激光雷达技术体制通过在一颗卫星上安装多个望远镜的方法实现水平风场矢量的探测,这种技术体制也可通过多颗卫星联合探测来实现。Marseille 等(2008)评估了5 种联合探测体制对预报系统的改善作用,这5种联合探测体制如图10所示,分别为:图10(a)Aeolus 单颗卫星探测;图10(b)Dual-perspective:其轨道与Aeolus 轨道一致,前后两颗星载激光测风雷达的探测方位角相差90°,可实现水平二维风场的探测;图10(c)Tandem-Aeolus:一颗卫星运行在Aeolus的轨道,另一颗卫星轨道的升交点与Aeolus轨道升交点相差50 min 左右,其他参数与Aeolus轨道一致,两颗星载激光测风雷达的技术体制与Aeolus相同,探测时,两颗卫星基本上位于相同纬度面上;图10 (d)Triple-Aeolus:与Tandem-Aeolus 类似,3 颗采用Aeolus 技术体制的星载激光测风雷达进行联合探测,其轨道升交点相差30 min左右;图10(e)Dual-inclination:两颗卫星运行于不同倾角的轨道,其倾角分别为97.2°和70°,第二颗卫星主要用于探测中低纬风暴多发地区的大气风场。
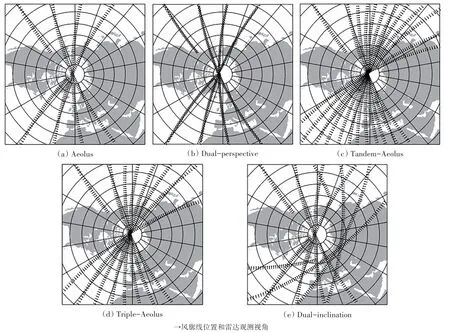
图10 5种星载激光雷达联合测风技术方案探测数据覆盖情况示意图(Marseille等,2008)Fig.10 The data coverage of five observation scenarios of spaceborne DWLs(Marseille et al.,2008)
Marseille等(2008)评估结果表明:(1)联合探测技术体制对数值预报系统的改善作用要明显优于单颗星载激光测风雷达;(2)提高探测风场的覆盖面更有助于提高预报系统的精度,如Tandem-Aeolus 体制、 Dual-perspective 体制和Dual-inclination 体制探测到的径向风速数量都是Aeolus 的两倍,但从对预报系统的改善作用来说,Tandem-Aeolus 体制的改善效果在三者中最好,后两种技术体制在特定情况下对数值预报系统的改善效果好,如Dual-inclination 体制的探测结果有助于改善中低纬地区,尤其是大西洋地区风暴的预测结果,在Dual-perspective 体制下,卫星星下点附近的数值预报结果改善作用明显,对比其他4 种探测体制,该体制其改善效果最佳,但是由于探测覆盖面较低,从全球整体来看,其对数值预报系统的改善作用比Tandem-Aeolus 体制低;(3)Triple-Aeolus 体制相比Tandem-Aeolus 体制,对数值预报系统有一定的改善作用,Tandem-Aeolus 体制相比Aeolus,其改善作用大约增加了66%,增加第3 颗卫星之后,相比两颗卫星,其增加的改善作用约为20%,该结果表明,3 颗以上星载激光测风雷达对预报系统的改善作用有限,太多的卫星可能带来数据冗余。
OSSE 结果表明,3 种星载激光雷达测风技术体制都能有效地改善数值预报系统的预报结果。水平二维风场的探测与径向风场的探测相比,改善星下点附近数值预报结果的作用更加明显。从对全球预报的整体改善效果来看,更广泛的探测覆盖面相比水平二维风场的探测,其效果更好。另外在运行OSSE 实验时,需要通过星载激光测风雷达仿真系统对观测风场的不确定度进行模拟,否则可能无法准确评估其对数值预报系统的改善效果。
通过Aeolus、HDWL 和CDWL 这3 种星载激光测风雷达技术体制的数据获取率和获取量、风场探测精度以及对数值预报系统的改进作用方面的对比可得,美国HDWL 技术体制可以探测平行于星下点轨迹上两条路径的风场数据,而Aeolus 和CDWL 只能探测一条路径的风场数据,故HDWL具有更广的数据覆盖面,其测风精度也相对较高,而且HDWL 可以实现水平二维风场的探测,日本CDWL虽然能实现水平二维风场探测,但其数据获取率较低,结合Marseille 等(2008)对5 种多星联合探测技术体制的评估结论可以预估,HDWL 技术体制对数值预报系统的改善作用相比其他两种体制较明显。但上述结论主要是通过前人所做实验的结论进行推理的,目前缺乏将3种技术体制置于完全相同的大气环境中进行模拟评估的实验,而且美国和日本的星载激光测风雷达目前仍处于论证阶段,其参数还在调整中,参数的调整会对测风精度产生较大的影响,并且雷达在太空运行后,由于环境的改变,其发挥的性能还有待评估。所以这两种技术体制的激光雷达测风精度以及对预报系统的改善效果还有待进一步研究。
4 结论
2018年全球首颗星载激光测风雷达卫星Aeolus的成功发射标志着人类在全球风场的探测方面迈入了新的阶段。目前,美国和日本也在积极论证和研制HDWL 和CDWL 星载激光测风雷达技术体制,中国也在开展相关研究工作。不同星载激光测风雷达技术体制决定了研制成本和发挥的作用。目前的评估结果表明星载激光测风雷达对数值预报系统具有较好地改善作用,使用单颗卫星进行全球风场探测时,美国HDWL 技术体制相比欧洲空间局Aeolus 和日本CDWL 技术体制能够获取更多的风场探测数据,其测风精度较高,将更有助于数值预报系统结果的改善。使用多颗卫星进行联合探测时,更广泛的探测覆盖面相比水平二维风场的探测,更有助于改善全球数值预报系统的预报效果。水平二维风场的探测,对改善卫星轨道附近的数值预报系统结果效果最佳。
星载激光测风资料对全球数值天气预报效果改善作用的评估是一项复杂的工作,其中牵涉到对测风不确定度的评估,而星载激光测风资料的不确定度不仅与激光雷达技术参数有关,还与卫星轨道参数和大气不均匀性有关。因此,开展星载激光测风技术体制的论证还需要做深入的研究,以便获得最优的技术方案。