基于相位特征的二次雷达解交织技术研究
2022-07-06曾湘洪苟玉玲
曾湘洪 ,苟玉玲 ,唐 博
(1.四川九洲空管科技有限责任公司,四川 绵阳 621000;2.四川九洲电器集团有限责任公司,四川 绵阳 621000)
0 引言
二次雷达信号处理主要采用应答信号幅度信息,相位信息只用来计算天线符号位。近年来,由于飞行流量大幅提高,飞行近距离接近频繁,二次雷达系统缺陷日渐显现。由于应答信号交织情况下,交织码元幅度信息发生无规律变化,单纯利用应答信号的幅度信息势必造成二次雷达代码和高度提取错误,以至监视性能急剧下降。
《ICAO 附件10》规定,二次雷达A/C模式应答机应答频率为1 090 MHz±3 MHz,S模式应答机频率为1 090 MHz±1 MHz。由于每个应答机应答频率存在随机的抖动,不同应答机之间的应答信号相位都不具有相关性。因此可通过接收信号的相位信息特征较好实现交织信号的分离,并正确还原交织信号的码元,提高交织情况下二次雷达的监视性能。
1 SSR 应答信号交织情况分析
1.1 SSR 应答信号特点
SSR 常规模式应答信号采用ASK 调制方式。应答脉冲由14个码元+SPI特殊位置识别码组成,可标识4 096种飞机代码,-0.304~38.633 km 飞行高度。应答编码格式如图1所示。

图1 SSR 应答信号格式
飞机代码采用八进制表示方式,排列顺序为:

应答代码中有3组码代表危急信息,不能选作识别码,即:7700表示飞机机械故障;7600表示飞机通信故障;7500表示飞机受非法干扰。
高度码同样采用八进制表示方式,排列顺序为:

信号处理过程中,通过检测F、F应答框架,提取应答代码和高度数据,并根据和差通道信号幅度差进行偏离视轴方向角(OBA)修正,求解应答飞机真实方位。
1.2 交织情况下应答信号特征分析
由于应答信号框架宽度为20.3μs,在未开启SPI 情况下,当2 架飞机距离间隔小于3 km(20.3μs×150 m/μs≈3 km)时,应答框架就会产生交织,如图2所示。

图2 飞机距离小于3 km 时应答信号交织情况
当交织产生码位占据时,正常码位的幅度发生畸变,并产生多个虚假框架。通过基于幅度的译码方式很难将多个交织信号分离开,造成监视代码、高度错误,监视方位精度恶化。
针对代码跳变通常采用航迹处理进行平滑外推,但在跨管制区变更应答代码时造成代码探测延时,在飞机大机动拐弯时偏离真实航迹。特别是近距离编队飞行、多径引起的交织,通过后端软件处理并不能达到理想的解交织效果,甚至会出现二次代码、高度、方位完全紊乱,二次雷达情报质量下降。
从图3中可以看出,A 代码为5154、0047的飞机飞行距离过近,应答信号交织。造成监视点迹扭曲严重,并出现错误代码5174。
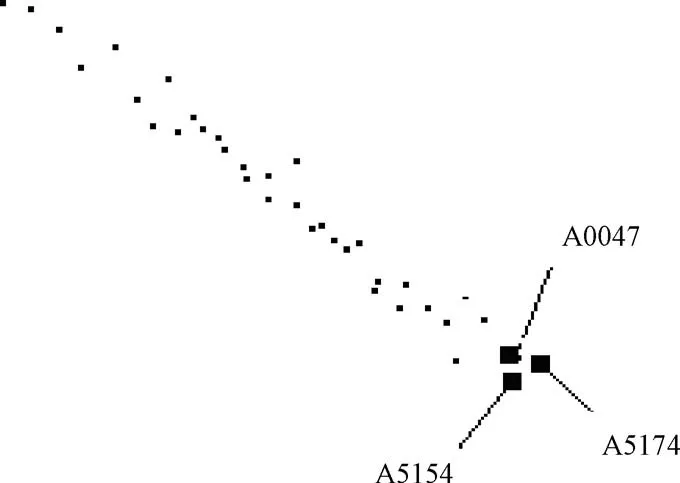
图3 交织情况下点迹上报结果
2 基于相位特性的解交织理论分析
2.1 应答信号相位特征
应答机应答编码器将编好码的基带信号输出,通过混频方式将基带信号调制到1 090 MHz发射频率上。由于混频本振存在一定的频率抖动,一般在±200 k Hz左右,因此不同飞机应答频率、相位会存在一定差异。
发射调制时基带信号类似一个开关,本振在基带信号1或0的控制下通或断,而本振频率短时间内可看作不变,因此同一个应答框架内,所有码元的相位连续,如图4所示。

图4 调制后信号和本振相位关系时间
从以上分析总结应答信号特征如下:
(1) 同一飞机应答信号到达二次雷达接收机的相位连续;
(2) 不同飞机应答信号到达二次雷达接收机的相位不一致;
(3) 相同应答信号,经过多径反射前后到达二次雷达接收机的相位不一致。
通过以上3点,可以从应答信号到达接收机后的相位特征得到可靠的解交织手段。
2.2 应答信号相位特性的数学模型
假设2 架飞机应答信号()、()发生交织,应答信号数学模型为:

式中:、为基带信号;、为应答信号频率;、为应答信号相对SSR 接收机混频源相位。
混频后I路信号为:
经过低通滤波后,基带Q 路信号为:

混频后信号Q 路信号为:

经过低通滤波后,基带Q 路信号为:


式中:Δ;Δ。
经过科斯塔斯环求解幅度:

从上式可以看出,交织情况下解调出基带信号幅度不仅跟信号功率有关,还跟2个交织信号相位有关。因此信号交织部分解调幅度信息已经不可靠,不能作为码元提取的依据。
当2个应答框架交织时,交织码元解调相位为arctan(()/()),其相位与Δ、Δ、、有关。因此,交织前后码元相位会发生突变,根据相位突变情况可准确定位交织位置,确定各码元归属框架,防止代码提取错误。由于同一框架内脉冲相位连续,频率不变,结合计算出的相位信息,计算出预测相位值,预测相位值为:

通过预测相位和真实相位的比对,准确定位交织位置、码元幅度置信度、码元归属框架。
3 基于相位特性解交织仿真
Matlab中模拟2架飞机产生2组应答信号,飞机方位差小于1个主波束宽度,距离1.74 km,因此在询问波束都照射到2架飞机后,2个应答信号会发生码位占据交织。码位占据交织往往会产生多个虚假应答框架、虚假代码,常规基于幅度的解交织方法几乎失效。图5 中模拟了2 架飞机应答频率一致、相位差90°的交织情况。

图5 模拟产生虚假框架和幅度异常情况
从图5可以看出,交织后产生多个虚假应答框架,产生虚假应答;交织后通过幅度无法确定码元归属框架,代码提取错误,造成对真实飞机监视失效。
经对混频、滤波后的I、Q 信号相位特征进行计算,得到以[-π/2:π/2]为周期的变化相位值,相位变化率即应答信号与混频本振信号角频率的差值Δ。
由于交织位置在2个框架中间,信号最前和最后脉冲未交织;因此,相位预测采用从所有检测框架中最前框架的F开始正向推算,从最后框架的F反向推算。采用2个框架双相位预测方式(如图6)进行判断。
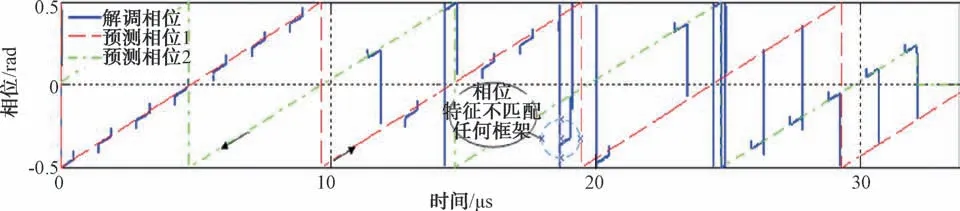
图6 码位占据解调相位及双向预测相位
码位归属判断可采用表1的决策方法。

表1 双向相位预测码位判决方法
由于脉冲上升和下降沿相位计算结果存在抖动,会影响角频率计算结果的准确性;因此,可采用对解调幅度进行视频处理后产生的相位处理门,使相位取值尽量选取脉冲中间部分的相位值。
利用单独1个或2个码元计算角频率会产生一定误差,会造成远离计算起始点的相位预测值偏离真实相位,可能引起预测错误。采用逐步递推修正法,通过多个码元逐步将计算角频率Δ的误差降至最小值。
4 实验验证
搭建实验平台,询问主机通过功分器连接2个应答器,调节2个应答器的应答距离,实现2个应答代码的码位占据交织。实验平台搭建示意图如图7所示。

图7 基于相位特性的SSR 解交织实验平台示意
应答模拟器和ATC-1400 应答距离设置相距1.74 km,使得应答信号1的B1码位与应答信号2的F1码位占据交织。分别解算应答信号交织下后的幅度和相位信息。图8为应答功率下交织信号的解调幅度和相位信息。
图8中由于噪声叠加的影响,造成相位解调结果抖动较大。通过对幅度信号进行6 d B视频处理,将处理得到的相位处理门信号与相位信号相乘,剔除脉冲间的相位噪声。
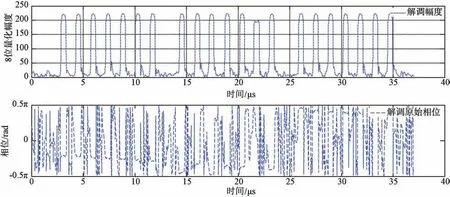
图8 解调后原始幅度及相位信息
由于噪声叠加到有效应答脉冲上,造成单个码位的相位变化率抖动,存在较大误差。通过单个脉冲无法计算出趋近真实的角频率Δ。
结合二次雷达译码的框架提取算法,找到最前、最后2个应答框架,计算正向和反向双向预测曲线。采用表1的判定方法,判定码元归属,如图9所示。
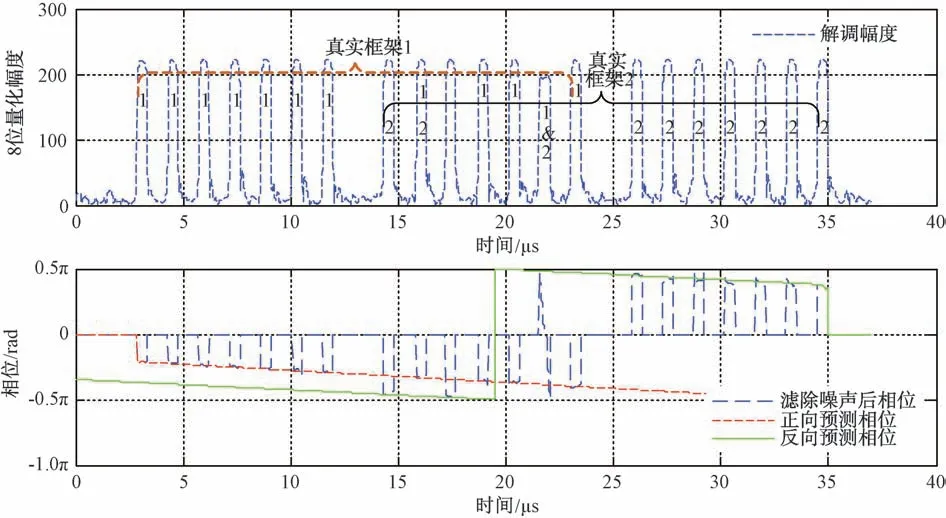
图9 2个目标码位占据解交织情况
5 结束语
当2架飞机距离较近,且长时间编队飞行时,应答代码容易出现码位占据交织的情况。传统基于幅度的译码方式无法解算出正确的飞机代码,造成二次雷达监视失效。基于相位特性的解交织技术在基于幅度的基础上,引入了信号的相位特性,可轻松完成两重码位占据交织的框架代码分离,提高译码结果的可靠性,极大提高二次雷达的解交织能力。但由于受噪声和多径干扰的影响,对信噪比较小的信号提取角频率Δ时,精度的下降会扩大解交织运算的模糊区,影响基于相位特征的二次雷达解交织的效能。