基于Halcon的环保型餐盘缺陷检测方法
2022-07-05彭昕昀林文强龙迎春
彭昕昀,林文强,龙迎春,李 锦
(韶关学院 智能工程学院,广东 韶关 512005)
环保型餐盘在生产过程中采用工业机器人快速大量生产,由于生产工艺和生产环境的影响,会出现少量缺陷产品.目前厂家对环保型餐具的缺陷检测大多采用人工分拣,人工目检的检测速度慢、检测失误率高、检测效率远低于机器视觉检测效率[1].随着中国智能制造在全国制造业大规模的推广应用,国产的图像处理技术和机器视觉技术的快速发展,现代化智能制造工厂采用机器视觉检测系统代替了人工目检.笔者基于Halcon图像算法平台,主要研究环保型餐盘的边缘缺陷和表面污点的图像处理算法.
1 环保型餐盘的缺陷分类及检测流程
环保型餐盘的表面缺陷主要包括边缘缺陷、表面污点、内部破损、内部划痕、圆形度不良等.通过工业相机对环保餐盘进行图像采集,在Halcon软件平台运用算子处理,通过检测结果进行分析,从而判断出正品和次品.
环保型餐盘缺陷检测步骤主要包括:(1)图像采集系统拍照后,传送原图像到图像处理系统,运用图像灰度化和图像分割进行预处理;(2)通过灰度化阈值分割方法,提取被检餐盘图像中所需检测的区域(ROI区域);(3)分别提取图像中的边缘特征和内表面特征,根据圆度和区域数量等特征来判断是否为缺陷产品;(4)标记出被检产品的缺陷区域,再输出结果[2].餐盘缺陷检测流程如图1所示.

图1 环保餐盘缺陷检测流程
2 图像预处理
2.1 图像灰度化
图像灰度化是图像处理系统基本的图像预处理,为之后的特征点提取、特征识别和特征检测等图像处理操作做准备.灰度化处理有分量法、平均法、最大值法以及加权平均法等.笔者采用加权平均法进行灰度化处理,将彩色图像中的三分量亮度求平均得到一个灰度值[3].即:

其中,gray 表示图像处理后灰度值,red表示在图像处理后红色占用的灰度值,green 代表图像处理后绿色占用的灰度值,blue表示在图像处理后蓝色占用的灰度值.
2.2 图像增强
图像增强是指运用某种方法对图像进行处理,增强图像特征,如对环保餐盘边缘或轮廓等进行处理,增强图像的清晰度,使图像特征更加明显.图像增强的方法可分为两类:空间域法和频域法.笔者选择空间域法中的灰度值线性化[4-5],即:

其中,Mf表示f(x,y)的最大值.
2.3 ROI(0Region of Interest)提取
ROI是指用户感兴趣的一个或多个经过固定划分的子图所组成的集合[6].在被检餐盘产品中,需要提取边缘缺陷和表面污点的缺陷区域,多个不同脏污缺陷点可能出现在被检餐盘的不同位置,需要提取不同的ROI区域,消除其他缺陷位置的影响,以提高餐盘缺陷检测的准确性.
2.4 图像定位
笔者根据设置图像采集系统的固定位置,来实现图像定位.即设置被检产品的Y轴坐标为一个固定坐标值,进行图像定位.当被检产品的Y轴运动到图像采集系统的固定坐标位置时,图像采集系统实现图像定位,启动拍照.如果被检产品的Y轴没有运动到指定位置,系统会报错.当被检产品实现图像定位后,运动系统的X、Y、Z三轴会重新回到零点,为下一次被检产品的图像定位做准备.
3 环保餐盘缺陷的检测算法
3.1 表面污点检测算法
对环保餐盘表面污点的检测先采用欧式距离变换[7],将二值图像转变为灰度图像.欧式距离变换是把原图像的像素到边缘的像素距离转变为灰度值的大小,距离越大,灰度值越大,图像中间比较光亮.欧式距离变换主要呈现图像的骨架.图2为被检测餐盘的原图像,图3为经过欧式距离变换后的效果图,欧式距离变换公式如下:

图2 环保餐盘原始图像

图3 经过欧式距离变换后的效果图

环保餐盘原始图像经过二值图像的欧式距离变换后,再对该图像采用分水岭运算的方法进行处理.本文使用快速图像分割算法[8].运用快速图像分割算法,如果被检餐盘表面没有污点,图像区域只有一个;如果被检餐盘表面有污点时,图像将分成n+1个区域,n表示污点的数量.当出现多个区域,图像处理系统将采用不同颜色进行标记,并分割出来.经过分水岭算法后,被检餐盘图像的效果如图4所示.

图4 分水岭算法后效果图
利用区域交集算法,对没有图像分割的区域和运用分水岭算法分割的区域进行交集,所得到的区域数量来判断表面污点的数量,当区域交集数量为1时,说明环保餐盘表面没有污点,当区域数量大于2时,环保餐盘表面污点为n-1个,n表示区域交集数量.运用intersection算子进行交集的数学模型如图5所示.

图5 数学模型
当被检餐盘表面有污点区域时,运用区域交集算法会标出污点交集区域,餐盘内部污点检测后结果如图6所示,餐盘的表面污点检测算法流程如图7所示.
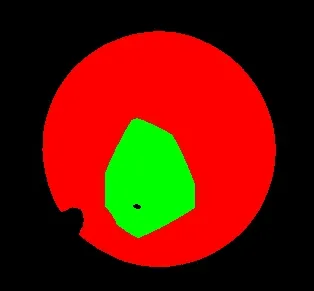
图6 餐盘内部污点检测后结果图

图7 餐盘表面污点检测算法流程
3.2 边缘缺陷检测
对被检餐盘进行边缘缺陷检测时,先进行图像预处理.首先进行图像的灰度变换,再使用闭运算把干扰点腐蚀,之后用开运算进行填充.使用Halcon软件中的fit_circle_contour_xld算子,找出被检餐盘的圆心坐标和半径;接着使用gen_contour_region_xld算子,进行Canny亚像素的边缘提取[9].笔者通过像素级别来寻找被检餐盘的边缘,通过比较两个阀值大小,来判断寻找边缘点是真边缘点还是伪边缘点.运用数学公式拟合出边缘,找到真正的餐盘边缘.之后进行边缘圆度判断.圆度计算需要先输入一个区域,并且该区域要与一个圆进行比较,算出输入区域与圆的相似度.餐盘边缘缺陷检测的处理流程如图8所示.被检餐盘图像经过边缘算法处理后,得到清晰的红色边缘轮廓图像如图9所示.

图8 餐盘边缘缺陷检测的处理流程

图9 餐盘边缘缺陷的检测效果图
4 实验结果分析
为了验证环保餐盘缺陷检测的稳定性和准确性,对不同缺陷类型的环保型餐盘进行测试.测试样本总数为200张,50个合格品出现一个误检,测试结果如表1所示,总体检测准确率为99%.

表1 测试结果统计表
测试中部分参数具体设置如下:(1)表面污点的检测中,设置判断数量,如果区域交集数量大于1,则判断为有污点.(2)边缘缺陷的检测中,正常边缘的圆度为0.97以上,如果圆度小于0.97则判断为有边缘缺陷.
5 结语
笔者提出的基于Halcon的环保型餐盘的缺陷检测算法,运用图像处理算法对产品的表面污点和边缘缺陷进行检测,在实验室运用三轴工业机器人实验设备,检测200份样本后,出现两个误检.实验测试结果表明,本缺陷检测算法稳定性好、精确度高,可满足环保餐盘生产过程的缺陷检测需要.本文针对环保餐盘产品的多种缺陷检测需求,先进行分区检测,能较好地提高检测的准确性,但对检测速度有一定的影响.如何增加环保型餐盘产品的更多缺陷检测需求和检测速度,有待后续进一步研究.
