动态导航与静态导板对种植手术精确度影响的Meta分析*
2022-07-05刘晨曦董静博吕鹏军袁会平石培凯
刘晨曦 董静博 吕鹏军 袁会平 石培凯
随着科技的发展,目前,种植修复技术已经成为治疗牙齿缺失的首选方法,而准确的种植体植入三维位置则是获得理想种植修复效果的关键[1-3]。在当下的临床工作中,计算机辅助种植外科技术(computer-aided implant surgery, CAIS)已成为帮助我们实现这一目标的重要辅助工具。计算机辅助种植外科技术[4]主要分为两类:计算机引导(静态引导)外科(static computer-aided implant surgery, sCAIS):术前 拍 摄 锥 形 束CT(Cone Beam CT, CBCT),在计算机内通过软件进行种植体植入位置和数目的规划,并生成外科导板,借助外科导板引导进行手术,术中无法临时改变种植体植入位置。计算机导航(动态引导)外科(dynamic computer-aided implant surgery,dCAIS):术前患者戴配准装置拍摄CBCT,同样在计算机内进行种植规划,手术前进行手机的注册、图像的配准,在术中行实时动态导航,术者可以根据术中情况实时对手术方案进行调整。近10年来,随着图像采集技术与导航技术的逐渐发展与成熟,越来越多的临床医生开始借助动态导航进行种植手术。与传统的自由手种植与静态导板引导下的种植相比, 其优势在于:1、借助术前采集的信息数据,肉眼不可见的解剖结构可以在导航仪屏幕上实现可视化。2、更大程度地微创。3、可以更加快速直观的制定手术方案。但对于其精确度的评价及误差分析,仍是目前学术界比较关注的热点话题。
目前已有的研究主要是利用软件通过对术前、术后的CBCT 数据资料进行拟合,将术前设计与实际种植体的位置进行比较,从而对种植手术的精确度进行分析。已有研究表明[5,6],与传统种植相比,应用计算机辅助种植外科技术能提高种植体实际植入位置的精确度,但其在使用过程中仍会产生一定误差。作为计算机辅助种植外科技术中的重要组成部分,动态导航与静态导板技术已在临床上广泛开展,因此对这两种技术方式进行比较研究有一定的临床指导意义。部分体外研究[7-10]表明,动态导航植入的精确度要低于静态导板系统。也有学者对动态导航与静态导板在模型上的精确度进行了Meta 分析,但与体外研究相比,在患者体内进行种植手术时,植入物的精确度将会受到软组织,唾液和张口度等相关因素的影响[11]。本文将对在临床研究中,辅助应用动态导航与静态导板行种植手术的精确度进行Meta 分析,以期为临床提供一定的借鉴作用。
1.材料与方法
1.1 文献检索 检索Cochrane library、Pubmed、Embase、维普、知网、万方、中国生物医学文献数据库、美国临床试验注册中心、中国临床试验注册中心。英文检索词:dental implant 、dynamic navigation、navigation system、dynamic computer assisted 、dynamic computer guide、static computer guided。中文检索词:种植、计算机辅助种植外科、计算机引导(静态引导)外科、计算机导航(动态引导)外科、静态导板、动态导航。检索时间为建库至2021年10月1日。
PubMed检索策略:
("Surgery, Computer-Assisted"[Mesh]OR"navigation system" OR "dynamic navigation"OR "dynamic computer aided" OR "static computer guided" OR "dynamic computer assisted") AND ("dental implants" OR "dental implant")
1.2 纳入标准与排除标准
1.2.1 纳入标准①研究对象:使用计算机辅助种植外科技术行种植外科手术的患者。②研究类型:随机对照试验(Randomized Controlled Trial,RCT)和临床对照试验(Controlled Clinical Trial,CCT)。③干预措施:干预组应用动态导航行种植外科手术,对照组应用静态导板行种植外科手术。④结局指标:种植体顶部的测量偏差(mm)、根尖部的测量偏差(mm)、深度的测量偏差(mm)和角度的测量偏差(°),包含其中1项或1项以上均纳入。
1.2.2 排除标准 ①动物实验、综述、病例报告、体外研究。②非RCT,非CCT。③无法取得原始资料或文献报导资料不完整或不能使用,亦未能与作者取得联络。
1.3 数据提取2位评价者按照设定的纳入和排除标准对文献进行独立的文献评价,如有意见分歧则与第三人进行协商。提取内容为:1、纳入研究的基本信息;2、干预措施的细节;3、研究对象的基线特点;4、所需要的结局指标和其测量数据;5、偏倚风险评价的关键要素。
1.4 质量评价2名评价者根据Cochrane手册5.10版推荐的“偏倚风险评估工具[12],对纳入的4篇RCT独立进行质量评价。对于纳入的3篇CCT采用MINORS条目(methodological index for non-randomized studies,MINORS)作为质量评价标准[13]。任何争议都与第三人讨论解决,如果数据丢失或不清楚,将与作者进行联络以获取需要的数据。
1.5 统计分析 使用Review Manager 5.4软件进行Meta 分析。当I2<50%时,应用固定效应模型;当I2≥50%时,应用随机效应模型。采用加权均数差(weighted mean difference, WMD)对连续性数值变量的合并统计量进行评价,并计算其95%可信区间(confidenceinterval,CI),P<0.05 为差异有统计学意义。用森林图(forest plots)描述该研究的效应估计值及可信区间。
2.结果
2.1 检索结果 共检索相关文献803 篇,经过筛选前剔除重复文献,初筛后得到32 篇。仔细阅读全文后,纳入7篇文献[14-20],进行Meta分析,包含4个RCT,3个CCT,共502 颗种植体。文献筛选流程见图1。
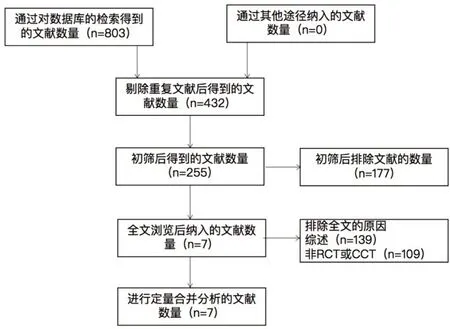
图1 文献筛选流程及结果
2.2 纳入研究的基本特征,结局指标示意图和偏倚风险评价结果 见表1、表2、表3、图2和图3。

图3 纳入研究的偏倚风险评价。“+”低风险,“-”高风险,“?”不清楚
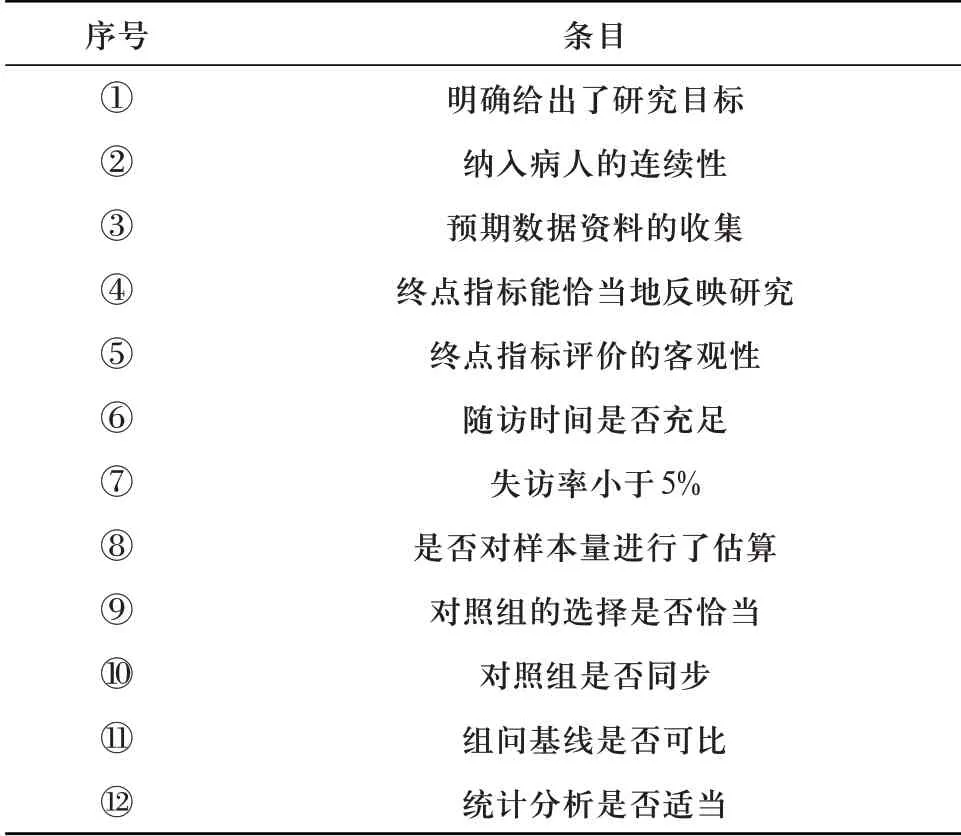
表3 MINORS评价条目
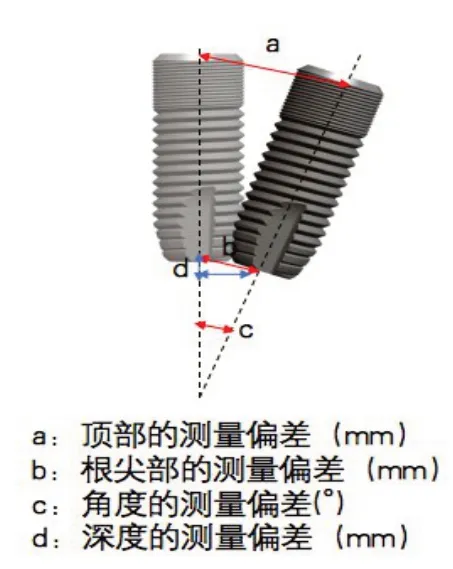
图2 研究的结局指标示意图0分:未报道;1分:报道了但信息不充分;2分:报道了且提供了充分的信息
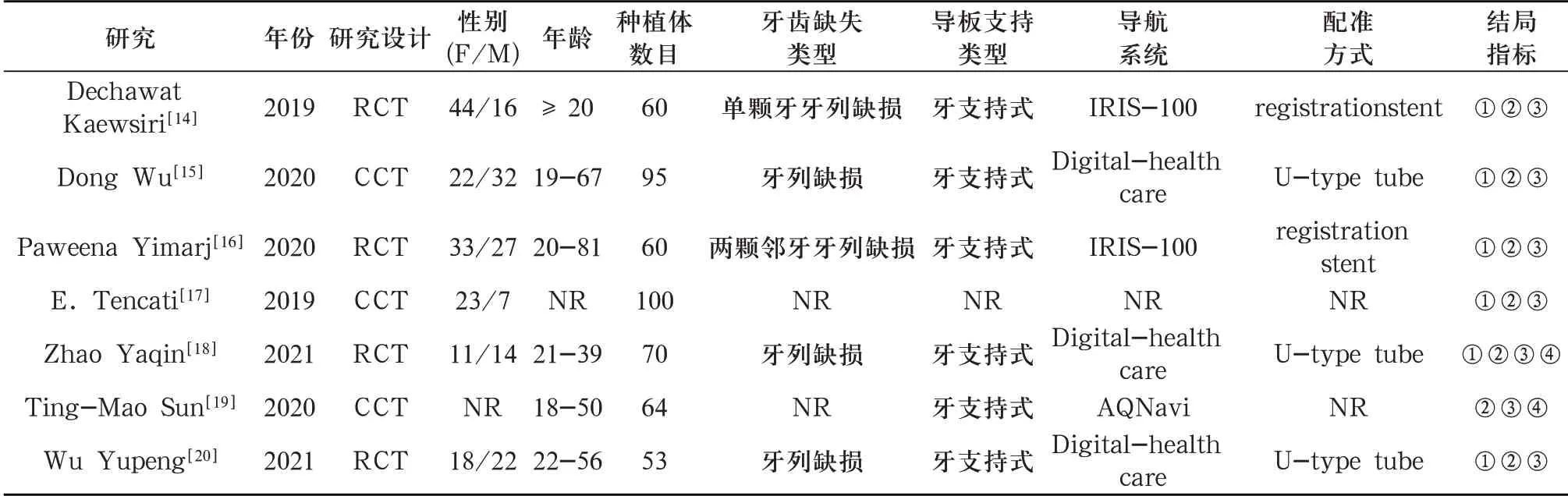
表1 纳入研究的基本特征

表2 临床对照试验MINORS评价标准
2.3 Meta分析结果
2.3.1 种植体顶部的测量偏差共纳入6 项研究[14-18,20]固定效应模型分析结果显示,动态导航与静态导板组的种植体,术前设计与实际植入位点在顶部的测量偏差(mm)上的差异无统计学意义(WMD=-0.01,95%CI=-0.08~0.06,P=0.79)(图4)。

图4 种植体顶部的测量偏差Meta分析结果森林图
2.3.2 种植体根尖部的测量偏差共纳入7项研究[14-20]随机效应模型分析结果显示,动态导航与静态导板组的种植体,术前设计与实际植入位点在根尖部的测量偏差(mm)上的差异无统计学意义(WMD=-0.09,95%CI=-0.21~0.03,P=0.14)(图5)。

图5 种植体根尖部的测量偏差Meta分析结果森林图
2.3.3 种植体角度的测量偏差共纳入7 项研究[14-20]随机效应模型分析结果显示,动态导航与静态导板组的种植体,术前设计与实际植入位点角度的测量偏差(°)上的差异无统计学意义(WMD=-0.48,95%CI=-0.95~-0.01,P=0.05)(图6)。
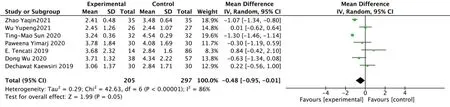
图6 种植体角度的测量偏差Meta分析结果森林图
2.3.4 种植体深度的测量偏差共纳入2 项研究[18,19]随机效应模型分析结果显示,动态导航组的种植体术前设计与实际植入位点深度的测量偏差(mm)小于静态导板组,且有统计学意义(WMD=-0.2,95%CI=-0.34~-0.06,P=0.004)(图7)。但对于种植体深度的测量偏差这一结局指标,本文纳入的样本量过少,对于本研究的结果应慎重解释。

图7 种植体深度偏差Meta分析结果森林图
2.3.5 发表偏倚 因本文各项结指标纳入的研究数量小于10 篇,无法对发表偏倚通过漏斗图进行评估。
3.讨论
本文结果显示,辅助应用动态导航与静态导板行种植外科手术的种植体,术前设计与实际植入位点在种植体顶部、根尖部和角度的精确度无显著差异,但静态导板组种植体植入深度的测量偏差更大。这可能与纳入的文章并未对种植的具体牙位进行限制,部分种植位点位于后牙区域,在后牙区种植时,由于导板本身具备一定的厚度,占据了垂直向的空间,并且导板在进行种植窝的预备时,因为需要借助套筒的约束作用,所以导板工具盒中的钻针较普通钻针更长。如果在患者开口度有限的情况下,与在前牙区进行手术相比,种植窝的预备和种植体植入时就有可能发生轴向的偏斜,从而影响手术的精确度。已有学者对在不同牙位应用静态导板的精确度做了研究,研究发现上颌前牙组的根尖部的测量偏差,深度的测量偏差,角度的测量偏差均小于上颌第一磨牙组[21]。但对于植入深度的测量偏差这一指标,本文只纳入了2 篇文章进行定量分析,纳入的样本量过少,未来仍需要纳入更多的研究以进行验证。
种植体植入的精确度,将会影响种植修复的后期效果[21]。目前已经发表的系统性综述与Meta 分析[22,23]多是集中在动态导航或静态导板的单中心研究或对比动态导航与静态导板的体外模型研究。而本研究重点对在临床试验中动态导航与静态导板的精确度进行对比分析。研究结果表明,辅助应用动态导航与静态导板可以获得相似的精确度,甚至通过动态导航可以获得更精确的植入深度。动态导航与静态导板相比,术者由“盲视”转为“直视”,可根据屏幕行实时动态引导种植,术中实时查看和修改手术方案,并且可使术区得到充分地降温,避免骨灼伤的发生[24]。尤其对于上颌牙列缺失伴上颌骨剩余骨量严重不足的患者和穿颧种植的复杂种植患者,动态导航的引导作用与静态导板相比具有更显著的优势[11]。
数字化的精确应用,体现在了种植手术流程的每一步之中,所以每一个步骤产生的误差都会对种植手术整体的精确度产生影响。在这一过程中两者的误差来源除了信息采集与整合,手术方案设计之外,静态导板产生的误差主要来自于患者口内情况的影响,如,采用先锋钻导板,后续备洞及种植体植入过程中,将失去导板的约束力,仍需要自由手进行后续操作,在某些骨质密度差异较大的病例中,钻针可能会顺着骨质密度较低,阻力较小的位置发生偏移,最终将对手术的精确度产生影响[25]。涉及到多个位点的游离缺失的病例,前期植入的种植体可能会使导板的游离端发生翘动,影响手术的精确度[25]。本次分析中纳入的部分文章中并未说明导板设计类型,并且涉及不同的牙齿缺失方式,这可能会产生一定的异质性。对动态导航精确度影响最重要的因素是配准方式,解剖标志法和皮肤表面配准法的精确度均低于骨内植入标记物法[24]。
吴东教授在试验中发现2名有15年种植外科手术经验的医生与1名只有1年种植外科手术经验的医生,在经过一定时间对动态导航系统的应用培训后,辅助应用动态导航行种植手术的精确度之间没有统计学差异[15],这可能表明,辅助应用动态导航行种植手术可以使“新手”外科医生和经验丰富的外科医生获得相似的手术精确度,缩短临床医生的学习周期。但是,与静态导板相比,动态导航设备的购买需要一定的资金支持,这就为其在基层的应用开展带来了一定难度。并且动态导航系统在使用之前,需要术者经过一段时间的系统化培训,才能获得足够的手眼协调能力和学习曲线,有文献指出,大约需要进行20例导航手术之后,术者才能获得比较稳定的种植体植入位置的精确度[26]。
本次研究也有一定的局限性:1、纳入研究的数量较少,缺乏大样本量、多中心的研究,对研究的结果应慎重解释[27]。2、纳入研究部分缺乏对患者牙齿缺失类型的描述,研究中采用了不同的导航系统与导板设计类型,这些均可能是异质性产生的主要原因。3、受语言条件的限制,除了中文及英文以外的文献没有进行筛选,有可能存在符合纳入标准的以其他语言出版的研究,但未被纳入。
综上所述,辅助应用动态导航与静态导板在种植外科手术中能获得相似的精确度,动态导航在种植体植入深度的测量偏差上甚至要小于静态导板。尽管数字化技术在种植外科中展现了巨大的优势, 临床医生在应用的同时也应当注意其局限性以及精确度问题。目前,静态导板与动态导航的使用过程虽然较以往有了很大的改进,但更加快捷、精准并便于在基层推广应用的方案仍有待进一步的研究和完善[28]。
