基于车载LiDAR 数据的高精道路地图制作
2022-07-04彭小婷
王 越,何 伟,周 琳,彭小婷,李 维
(1. 武汉市测绘研究院,湖北 武汉 430022;2. 武汉大学遥感信息工程学院,湖北 武汉 430079)
目前,国内外已开展了一些利用车载LiDAR数据进行高精道路地图制作的相关研究[1-9]。但总体而言,国内相关研究的起步较晚,且已开展的研究主要集中在理论和实验阶段,尚未形成较为完整的基于车载LiDAR数据进行高精道路地图生产的技术路线。
在武汉市作为全国首个新型基础测绘建设试点城市的背景下,本文选取武汉市中心城区约3 km2范围作为实验区域,利用车载移动测量系统快速采集该范围内各市政道路、道路交叉口及沿街附属部件设施的几何和纹理信息,以获取的点云数据为底图半自动化地提取各类道路专题要素的三维矢量信息,最终形成一套基于车载LiDAR数据进行高精道路地图制作的流程,并通过生产实践证明了本文方法的可行性。
1 高精道路地图制作流程
利用车载激光扫描技术制作高精道路地图主要包括外业数据采集、点云数据处理和点云测图3个步骤,总体流程如图1所示。其中,外业数据采集是获取三维道路环境信息的重要基础性工作,目的是快速获得高精度、高密度的道路点云数据;点云数据处理是保证点云精度质量的关键环节,主要包括点云坐标转换、位置纠正以及点云去噪等内容。点云测图是高精道路地图制作的核心内容,在地面点提取的基础上,对部分典型道路专题要素进行自动识别,再结合街景全景影像,在三维测图软件中采集道路及附属部件设施的空间位置及属性信息,最终构建全要素的高精道路地图。
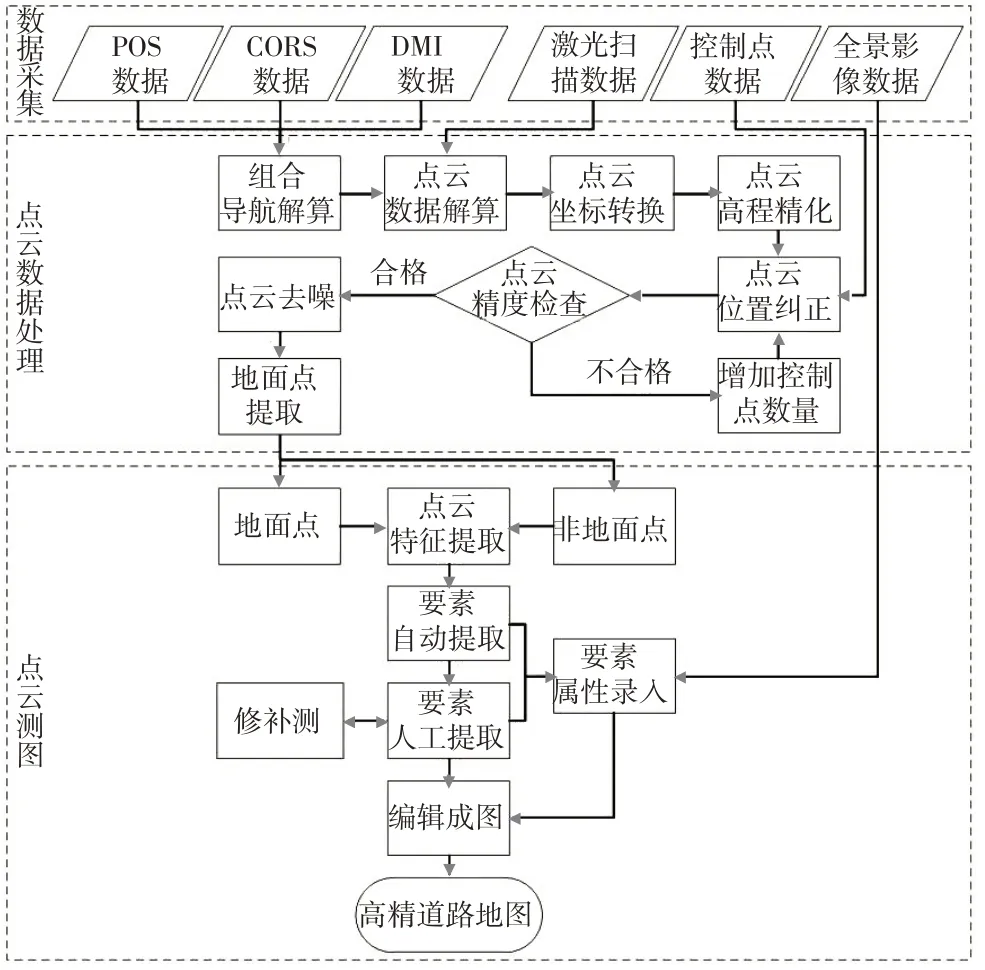
图1 基于车载LiDAR技术的高精道路地图制作流程图
2 外业数据采集
车载移动测量系统是一种以汽车为载体的移动型三维激光扫描系统,它能够快速获取道路及路侧的高精度三维空间信息,是目前城市道路环境三维信息采集最有效的方式之一。本文利用“HiScan-VUX”型车载移动测量系统进行外业数据采集,如图2所示。该系统由激光扫描仪(LiDAR)、定位定姿系统(POS)、高清全景相机、里程计(DMI)以及计算机控制系统组成。

图2 “HiScan-VUX”型车载移动测量系统
外业数据采集包括任务规划、数据采集和数据解算3个阶段:
1)任务规划。根据测区资料和现有路网数据,制定外业数据采集计划。一是结合测区路网分布情况,设计最优线路,并提前规划采集顺序,以确保道路数据采集的连贯性;二是合理安排外业时间,尽量选择理想的天气和时段进行采集,以保证全景影像的质量和点云数据的完整性。
2)数据采集。数据采集分为移动测量车、CORS基准站和外业控制点采集三部分:①移动测量车按计划路线匀速行驶,控制车速在40 km/h以内,尽量按一个方向采集一整段道路数据,并按照“先主道、后辅道”的顺序对双向6车道以上的道路进行多次往返采集,以获取全覆盖、高密度的道路点云。当车辆行驶在高架桥下或高楼密集区等GNSS信号较差的路段时,为避免出现POS数据无法解算的情况,需严格控制GNSS失锁时间,及时结束测站做静止观测。②CORS基准站:本文采用实验区域内武汉市连续运行卫星定位服务系统(WHCORS)的观测数据作为基准站,与移动测量车GNSS 流动站进行联合差分解算与定位。③外业控制点:为提高点云的整体精度,沿采集路线按折线方式布设一定数量的控制点分别作为纠正点和检查点;在GNSS信号遮挡较为严重的地方,控制点应适当加密。
3)数据解算。采集完成后,需对LiDAR、POS、DMI 等原始数据进行融合解算等预处理。首先利用POS和WHCORS数据计算出移动测量车轨迹;接着将轨迹及POS姿态数据与车载LiDAR激光回波数据进行融合,以获得点云的三维坐标;最后将点云与全景影像进行融合,以实现两者的高精度配准。
3 车载点云数据处理
车载点云数据处理是进行道路专题要素采集前的重要工作。点云作为道路专题要素矢量化的底图数据,其精度是决定最终高精道路地图成果质量的重要保证。因此,需对初始解算得到的点云数据进行必要的处理,以保证点云精度能够满足要素提取及测图要求。
1)点云坐标转换。经数据解算得到的初始点云坐标基准为WGS-84 坐标系,而城市测绘成果通常采用地方独立坐标系。WGS-84坐标系到地方坐标系的转换可分为平面坐标转换和高程基准转换两部分。本文采用的平面坐标系统为武汉2000坐标系(WH2000),高程系统则采用1985国家高程基准。采用七参数法进行WGS-84 与WH2000 坐标系间转换参数的计算,为求取3个平移参数、3个旋转参数和1个尺度参数,至少需要3 个以上的地面控制点。WGS-84 坐标系的高程系统采用的是大地高,而1985 国家高程基准为正常高,二者之间存在高程异常差值。本文通过实验区域内高精度、高分辨率的似大地水准面精化成果获取高程异常精确值,以实现高程基准之间的转换。
2)点云位置纠正。点云位置纠正是改善点云精度质量的关键环节。由于GNSS 定位误差、IMU 定姿误差等因素,点云的位置精度受环境条件的影响较大,使得同一路段的重访点云间可能存在一定的几何偏差。尤其对于高楼、高架桥密集的中心城区,GNSS信号遮挡较严重,容易导致同一路段往返观测的多时相点云之间存在分米级甚至米级的位置偏差[11],这将严重影响后续点云测图的准确率和精度。当重访点云间互差不能满足点云精度要求时,若通过布设密集外业控制点来改善点云精度,实施难度较大且人工成本高。为了减少外业控制点数量,本文采用一种由粗到精的点云配准全局优化策略[11],分三步进行点云相对位置改善:①根据点云误差分布情况,对点云进行筛选和分段;②提取分段点云的同名特征并进行特征匹配,实现分段重访点云间的两两配准;③对分段改正后的配准点云进行优化调整,完成点云相对位置纠正;再利用测区内均匀分布的少量控制点对整体点云进行绝对位置改正,优化全局点云的位置精度。此外,将一部分控制点作为检查点,对纠正后的点云精度进行验证,最终应满足《车载移动测量数据规范》(CH/T 6003-2016)中车载激光点云类Ⅰ级精度的要求[12]。当精度检查不合格时,通过加密控制点,重新进行点云分段纠正,直到满足要求为止。
3)点云去噪。通过点云去噪对数据进行优化:一是通过点云后处理软件自动剔除噪声点云,并滤除行进中的车辆、行人等与提取目标无关的点云;二是根据现有路网数据的道路宽度信息建立一定的缓冲区,去除道路范围外的点云,以减少数据冗余。
4)地面点提取。地面点提取是点云分类和要素提取前的必要准备工作。由于车道标线等路面标识通常位于道路表面,其点云高程坐标接近于路面高度,而道路两侧路灯、电线杆、行道树等均超出路面高度。因此,可结合轨迹数据按高程进行过滤,分离出道路面所在一定高度范围内的点并将其划分为地面点,而道路面以上为非地面点。
4 高精道路地图制作
4.1 道路要素分类
高精道路地图制作开始前,需确定待采集的道路专题要素对象及内容,以明确道路要素的类型、几何形状及属性字段等信息。根据要素几何形状特征的不同,可将道路专题要素划分为线要素、面要素及点要素[13]。其中,线要素用于构建三维道路的场景基础,如路边线、车道标线、护栏等路侧分隔设施;面要素用于表达占据一定空间范围的道路面状信息,如绿化带、公交车棚、停车位和安全岛等;点要素用于表示道路附属部件设施的位置信息,如路灯、道路标牌、信号灯和箱体等。
4.2 点云测图
以道路点云为基础,对部分典型道路专题要素进行自动提取和分类,再按照“线-面-点”要素的顺序依次进行人工采集和修补测,最终制作的高精道路地图以“线划图+数据库”的方式进行存储,具体流程如下:
1)要素自动提取。点云特征提取是描述点云形态结构的关键,也是实现道路专题要素自动提取的基础和前提。为提高要素采集效率,本文选取了几类典型的道路专题要素进行自动提取:①道路标志线:利用道路标志线较其周围路面具有较高点云反射强度的特性,根据点云反射强度投影生成特征图像,运用图像处理的成熟算法进行道路标志识别,然后将提取结果反算至原始点云,最后通过模板匹配进行标志准确分类[14];②道路边界线:基于已分离出的地面点,生成面向道路边界的超体素,再通过聚类进行路坎(路缘石)的识别、跟踪与优化,最终获得较完整的道路边界线[15];③杆状地物(如电杆、路灯等):根据杆状地物的几何和形状特性,利用圆柱模型粗略确定杆状地物的大致位置,再结合预先建立的训练样本,通过机器学习实现杆状地物自动识别[10]。图3 显示了实验区某路段的点云自动分类及要素提取结果。
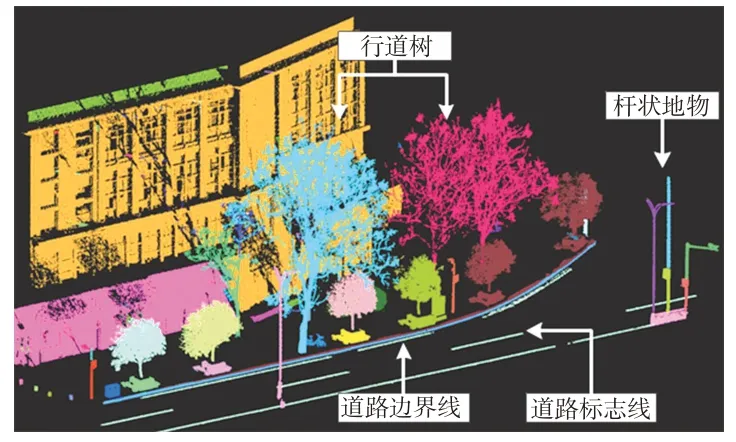
图3 道路专题要素自动提取效果图
2)要素人工提取。利用MappingFactory点云测图软件,对无法实现自动识别的道路专题要素采用人工提取。以车载点云为底图,进行点、线、面等道路专题要素的矢量提取和快速绘制,实现“即测即显、一次成图”。对点云遮挡较为严重的区域,容易出现要素漏测或错采,应做好记录并及时外业修补测。
3)要素属性录入。高精道路地图相较于传统地图具有更丰富的道路要素属性信息。在实现车载点云和全景影像精确配准的前提下,在测图软件中同时打开点云和全景窗口,通过选择轨迹点位置和调整全景视角,实现点云和全景窗口联动。接着,基于联动窗口同时完成要素定位和类型判断,录入地物名称、类型、形状、角度等属性信息,并通过软件自动批量生成要素编号及所属道路名称等信息。最后,通过外业调绘对缺失或无法判断的要素属性信息进行补充与核实。
4)编辑成图。在完成全部高精道路地图要素的采集后,进行要素符号化和图面整饰等一系列编辑处理,经质量检查合格后,即完成高精道路地图制作。
4.3 实验区高精道路地图制作结果
本文选取的实验区(范围线如图4a)位于中国湖北省武汉市江汉区,实验区面积约3 km2,区域内市政道路总里程约为21 km。实验区地处城市核心,路网较为发达,道路交通环境相对复杂,为高精道路地图生产实验提供了较充分的数据源。
按照前文高精道路地图制作流程,以车载移动测量系统采集的高精度、高密度的激光点云为参考底图,综合自动提取和人工采编的要素矢量化结果,共提取实验区道路专题要素16 万余个。图4b 展示了所制作的实验区高精道路地图的全局效果;图5 为实验区内某路口的地图细节放大图;图6 展示了高精道路地图与车载点云的叠加效果。地图成果显示,利用车载点云构建出的高精道路地图充分保证了道路场景的完整性,具有比传统线划地形图更为详尽的道路要素信息,可准确还原车道级道路、道路交叉口及沿街附属设施的空间布局。
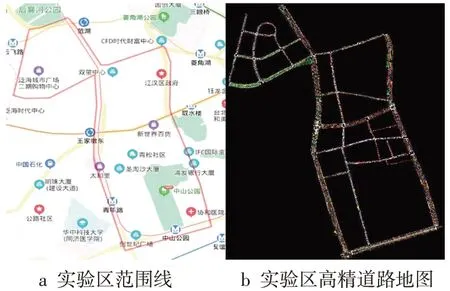
图4 实验区范围及对应的高精道路地图全局效果

图5 某路口的高精道路地图细节图
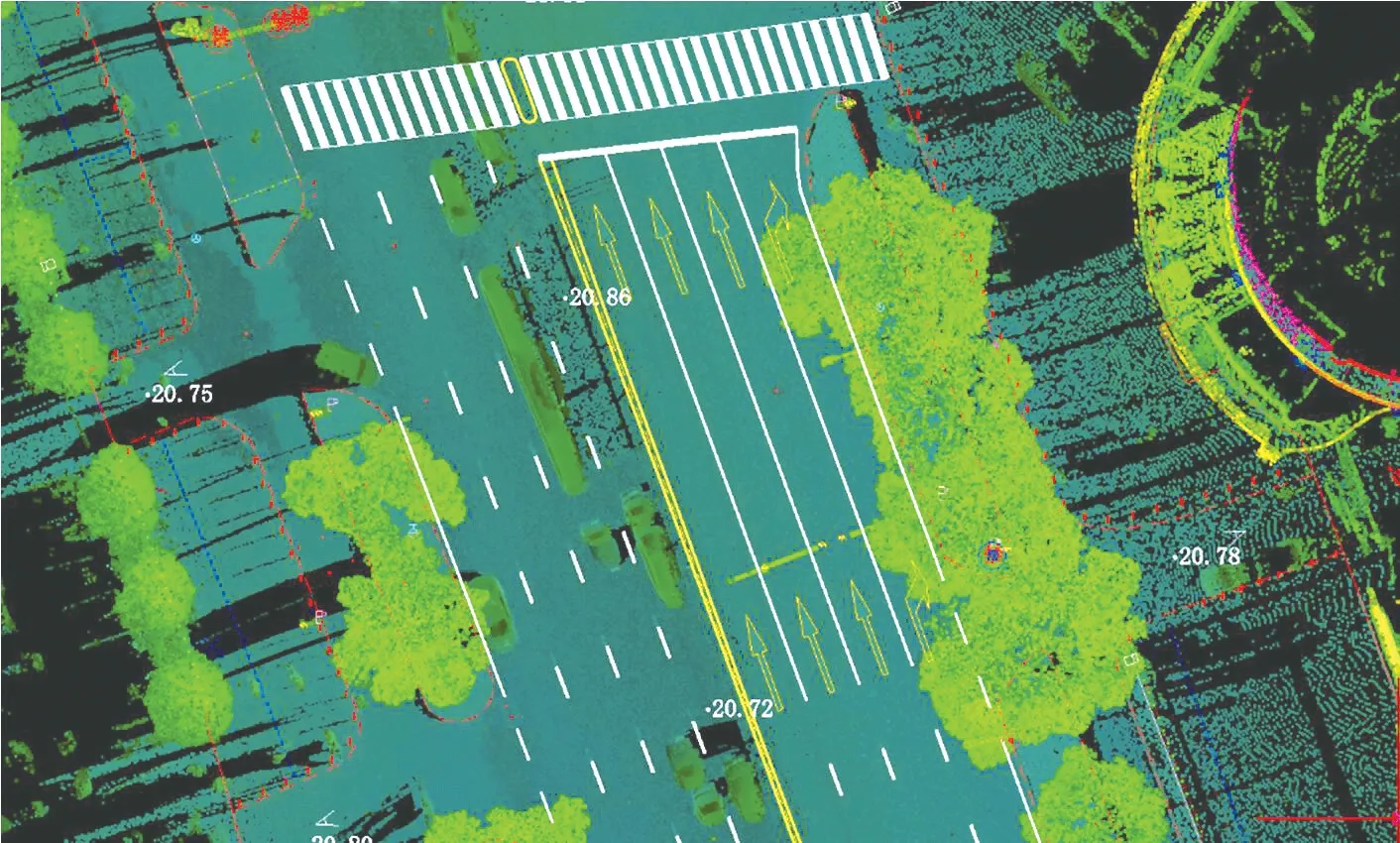
图6 高精道路地图与车载点云叠加效果图
为了进一步验证本文方法的可行性,利用外业控制点对所制作的高精道路地图成果进行精度评价。在实验区内,沿道路均匀选取较明显的特征点(如道路标识线拐点等)作为检查点,综合应用RTK和全站仪实测各检查点的平面和高程坐标,与点云测图成果坐标进行对比,并计算平面点位中误差及高程中误差等指标。表1 为实验区高精道路地图的精度评价结果,结果表明,实验区高精道路地图的总体平面精度优于0.1 m、高程精度优于0.05 m,已达到实现L3 以上级别自动驾驶所需的静态高精地图的精度要求[11-12],同时也能满足城市1∶500地形图修测更新的需求。

表1 实验区高精道路地图精度评价
5 结 语
车载LiDAR技术作为一种精细化的道路三维空间信息记录手段,为城市路网信息的快速获取更新及道路场景的三维环境构建提供了新的技术路径。本文设计了一套从移动测量车数据采集、点云数据处理到高精道路地图制作的完整流程,并以武汉市部分市政道路为例开展了制图生产实验,成果精度可满足L3以上级别自动驾驶及城市1∶500 地形图修测更新的要求。随着车路协同一体化应用需求的逐渐增强,可以预见,高精度道路地图将在自动驾驶、交通仿真以及智慧城市建设等领域发挥更大的作用。
