行波的旋转矢量法和驻波的可视化*
2022-07-04周群益
周群益
(广州理工学院通识教育学院 广东 广州 510540)
肖桂英
(广州理工学院机电工程学院 广东 广州 510540)
王培颖
(广州理工学院通识教育学院 广东 广州 510540)
莫云飞
(长沙学院电子信息与电气工程学院 湖南 长沙 410022)
周丽丽
(赣南医学院医学信息工程学院 江西 赣州 341000)
旋转矢量法可以直观地描述简谐振动,但是并没有文献用于描述简谐波.驻波是两列振幅相等、频率相同、传播方向相反的简谐波叠加的结果.有文献用旋转矢量法研究驻波的特征[1~4],虽然说明了一些问题,但是用旋转矢量法研究驻波较为困难,绘制的图像也不够具体形象.
有文献研究了驻波的能量[5~12],推导了能量密度公式和能流密度公式,但是没有用图像说明问题.还有文献用MATLAB研究驻波的能量[13],方法很好,若充分发挥MATLAB的可视化功能,则可进一步改进.
本文从简谐振动公式推导了简谐波的公式,用曲面说明简谐波的分布规律.用振动的旋转矢量法的动画说明了简谐波的传播过程,用动画的截图说明了驻波的形成过程,用曲面表示了能量和能流密度的分布规律,用动画的截图说明了能流的方向与能量分布之间的关系.
1 简谐振动和简谐波的旋转矢量法
1.1 波形曲面和曲线
如图1所示,设一个质点在原点做简谐振动,振幅为A,角速度为ω,初相为φ0.旋转矢量A顺时针旋转,ω的方向垂直纸面向里.
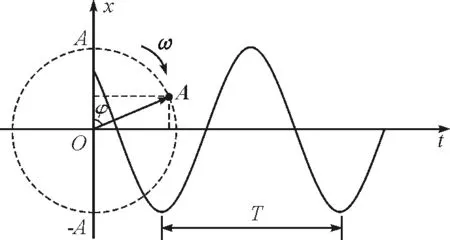
图1 简谐振动的旋转矢量图
经过时间t,相位φ=ωt+φ0,位移为
x=Acosφ=Acos(ωt+φ0)
(1)
这是质点的运动方程,其周期为
(2)
设波沿着Or方向传播,波速为u,则波长为
(3)
x=Acos[ω(t-t0)+φ0]=
(4)
x(t,r)=Acos(ωt-kr+φ0)
(5)
用周期和波长可以表示为
(6)
此式便于画图.
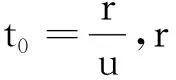
取周期T为时间t的单位,取波长λ为坐标单位,取振幅A为位移单位,则无量纲的波动方程为
cos[2π(t*-r*)+φ0]
(7)
利用MATLAB的surf指令可画曲面,利用plot3指令可画三维曲线[14].
如图2所示,取φ0=0,右行波的位移是波浪形的曲面.当r=0时,可得原点处质点的运动方程曲线,如实线所示;当t=0时,可得所有质点在初始时刻的波形曲线,如虚线所示.当r=2.5λ时,可得该处质点的运动方程曲线;当t=1.5T时,可得所有质点在该时刻的波形曲线.当r=2.5λ,t=1.5T时,质点的位移x=1A.

图2 波动方程曲面
1.2 波的传播的旋转矢量动画
利用MATLAB的计算和图形功能,我们设计了一个程序,可演示旋转矢量法与右行波传播的动画,见附录[14].
执行程序,初始时刻的旋转矢量和波形曲线如图3所示,每一点的旋转矢量都在不同的tOx平行平面上,处于竖直或水平位置.

图3 初始时刻的各点的旋转矢量和波形曲线
按任意键(例如空格键或回车键),旋转矢量和波形曲线如图4所示.所有矢量都旋转了一个角度,每一条矢量线与两条虚线组成一个直角三角形,矢量线在Ox轴上的投影就表示质点的位移,行波同时向右传播了一定的距离.波的传播方向与ω的方向相反.不断按任意键,各点的直角三角形随着矢量的旋转而改变,行波不断向右传播.当矢量旋转一周后,再按任意键,矢量就持续旋转,行波持续右行,直到按ESC键为止.
图4 某时刻各点的旋转矢量和波形曲线
修改程序也可以用旋转矢量法演示左行波的动画,读者不妨一试.
2 驻波的特点
2.1 驻波的位移
两列振幅相等、频率相同、传播方向相反的波的方程为(取初相φ0= 0)
x1(t,r) =Acos(ωt-kr)
(8)
x2(t,r) =Acos(ωt+kr)
(9)
其中,x1(t,r)是右行波,x2(t,r)是左行波.行波的特点是包含因子(ωt±kr).两波叠加的结果为
x(t,r)=x1(t,r)+x2(t,r)=
2Acoskrcosωt
(10)

振幅为零,此处称为波节.除了波节之外,其他各点做简谐振动.当kr=nπ(n=0,±1,±2,…)时
振幅最大,即2A,此处称为波腹.其他点的振幅介于零到2A之间.
取周期T为时间t的单位,取波长λ为坐标单位,取振幅A为位移单位,则无量纲的行波方程为
(11)
(12)
利用MATLAB的动画功能,可演示左右行波传播的动画以及驻波形状变化的动画[14].


图5 右行波,左行波和驻波的截图
2.2 驻波的能量和能量密度
设媒质是弹性均匀媒质,其质量体密度为ρ,在位置r处取一个体积元ΔV,其质量Δm=ρΔV.质元的速度为
(13)
质元的动能为
(14)
2ρA2ω2ΔVsin2krcos2ωt
(15)
对横波则要将杨氏模量Y改为切变模量G,结果完全相同.质元的机械能为
ΔE=ΔEk+ΔEp=
2ρA2ω2ΔV(cos2krsin2ωt+sin2krcos2ωt)
利用半角公式可得
ΔE=ρA2ω2ΔV(1-cos 2krcos 2ωt)
(16)
质元的动能、势量和机械能都是关于坐标和时间的二元函数,任何一个质元的能量都随时间做周期性的变化,其圆频率是驻波圆频率的2倍.由于能量公式中并不包括因子(ωt±kr),所以能量并不随波传播.
在一个周期内,质元动能的平均值为
(17)
质元势能的平均值为
(18)
机械能的平均值为
(19)
可见,一个质元的动能和势能的平均值与坐标有关,平均动能大的质元,其平均势能一定小,但是机械能是常数.
在波节处,coskr=0,sinkr=±1,质元的动能为ΔEk=0,势能为
ΔEp=2ρA2ω2ΔVcos2ωt
(20)
这是因为在波节处的质元静止而相对形变会随着时间发生改变.
在波腹处,sinkr=0,coskr=±1,质元的势能为ΔEp=0,动能为
ΔEk=2ρA2ω2ΔVsin2ωt
(21)
这是因为在波腹处的质元不发生相对形变而速度随着时间发生改变.
单位体积内的能量称为能量密度,动能、势能和机械能的能量密度分别用wk,wp和w表示.机械能的能量密度为
(22)
能量密度也是关于坐标和时间的二元函数.在垂直于Or方向取一个截面S,在r处取一个体积元dV=Sdr,在波节与波腹之间的机械能为
(23)
可见,波节与波腹之间的机械能是恒定的,不随时间改变.
取周期T为时间单位,取波长λ为坐标单位,取最大能量ΔEm=2ρA2ω2ΔV为能量单位,就能将动能和势能无量纲化,两者之和就是无量纲的机械能,简称能量.
取最大能量密度wm=2ρA2ω2作为能量密度的单位,则无量纲的能量密度就等于无量纲的能量.


图6 驻波的动能和动能密度
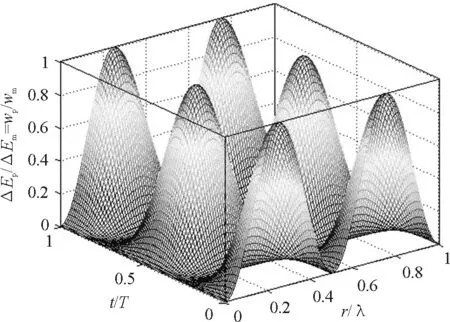
图7 驻波质元的势能和势能密度

图8 驻波质元的机械能和机械能密度
2.3 驻波的能流密度
对于右行波来说,一个质元的动能与势能相等,可以证明其能量(机械能)为
ΔE1=ρA2ω2ΔVsin2(ωt-kr)
(24)
单位体积内的能量就是能量密度.因此,右行波的能量密度为
(25)
沿着波的传播方向单位时间内穿过单位面积的能量称为能流密度,其大小等于波速与能量密度之积.右行波的能流密度为
I1=uw1=uρA2ω2sin2(ωt-kr)
(26)
同理,左行波的能流密度为
I2=uw2=uρA2ω2sin2(ωt+kr)
(27)
驻波的能流密度为
I=I1-I2=
uρA2ω2[sin2(ωt-kr)-sin2(ωt+kr)]
利用平方差公式,展开上式再化简,可得
I=uρA2ω2sin 2krsin 2ωt
(28)
(29)
说明驻波并不传播能量.
取周期T为时间单位,取波长λ为坐标单位,取最大能流密度Im为能流密度单位,就能将右行波和左行波以及驻波的能流密度无量纲化.
利用左右行波和驻波完全相同的方法,可以演示3个能流密度的动画.

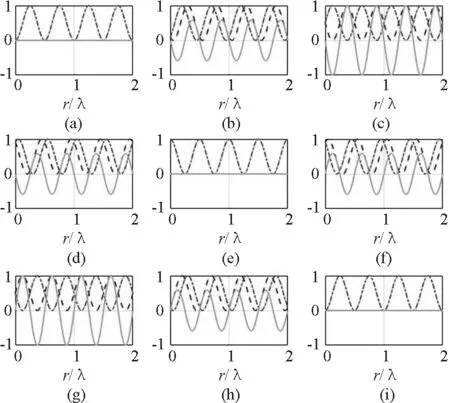
图9 右行波、左行波和驻波的能流密度截图
3 结束语
行波和驻波是机械波中的两个典型问题,波的传播和波形改变都可以用图形和动画表示.行波不但可以用曲面表示,还可以用旋转矢量法演示.在波节上质元的动能为零,势能随时间做周期性变化;在波腹上质元的势能为零,动能随时间做周期性变化.能量可以在相邻波节和波腹之间周期性流动,但不会传播.当能量向波节或波腹流动时,波节或波腹的能量就会增加,反之则减少.
学科交叉是学科发展的一个重要方向.MATLAB程序设计是一门学科,系统掌握这门知识有助于我们研究物理问题,也有助于物理教学.本文附录中的程序可供参考,相信有助于读者的教学和研究.
