果园升降作业平台的研制与试验
2022-07-02张鲁云杨怀君何兴村
张鲁云,杨怀君,何兴村
(新疆农垦科学院机械装备研究所,新疆 石河子 832000)
0 引言
高杆树产果实采摘长期以来都是一个世界性难题,西方发达国家从20世纪初期就已经开始高空升降作业平台的研发工作,目前已经形成完善的系列产品。我国果园作业平台研发工作不仅起步较晚而且进展缓慢,直到20世纪90年代中后期,各种国产果园、园艺管理作业机械才陆续推向市场。
随着新疆退耕还林和向南发展等农业产业结构的一系列优化调整,特色林果产业已经成为新疆兵团和地方经济发展的一条重要途径,果园管理的机械化需求也越发迫切。但目前新疆特色林果业的机械化程度仍然较低,果树修枝、喷药授粉、果实套袋、采摘收获等各项工作仍主要采用搭建扶梯、绳索悬挂以及人工攀爬等方式进行[1],不但工作效率低下,而且危害性较大。
针对新疆特色林果业发展现状,课题组研制了多功能自走式果园升降作业平台。该机型可实现单人操作,完成行走、升降、修剪、喷雾、授粉、采摘等各项作业,并通过了行驶、转弯、驻坡、负载、升降和采摘等多项性能指标测试。
1 结构组成及工作原理
1.1 整机结构
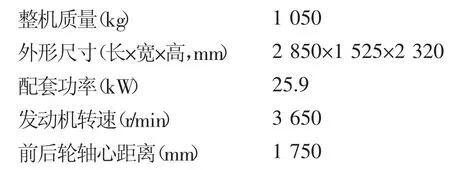
果园升降作业平台整机结构如图1,该机主要由行走地轮、液压升降装置、发动机、操控台、工作平台、顶棚、座椅、载物料斗等部件组成,主要技术参数如下。
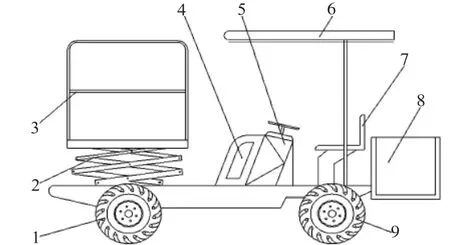
图1 多功能自走式果园作业平台结构
1.2 工作原理
果园采摘平台工作时,操作人员通过踏板和前方扶手登上升降作业平台[2]。工作高度根据需要通过液压升降装置进行调整,到达指定高度之后通过平台底部油缸进行左右伸展,后部的载物料斗可以装载运输果品。作业平台根据管理工作实际需求还可加装风机、喷头、液罐、空压机、气动剪等各种果园辅助管理机械装备以方便进行剪枝、疏花、套袋、授粉、喷药、采摘等各种工作[3],完全适用于现代果园的机械化管理作业。
2 升降平台设计
果园升降作业平台设计为折叠剪叉式升降平台,由主电动机提供动力驱动液压齿轮泵,液压泵输出高压液压油驱动设置在折叠架之间的液压缸实现升降运行。升降平台装置的主要功能是进行园林高空作业,液压油缸推动左右两侧伸展翼板,使平台面积增大便于对两侧果树进行高空作业。平台由剪叉式液压升降机构驱动,四周的防护围栏则保证了工作人员的作业安全。目前果树推行矮化密植种植模式,果树高度通常为3.5 m(根据实地测量所得),平台距离地面最大上升高度为2 m,结合人体自身高度和机身高度,可满足作业需求,不会出现作业平台上升过高,重心不稳和倾倒等现象。
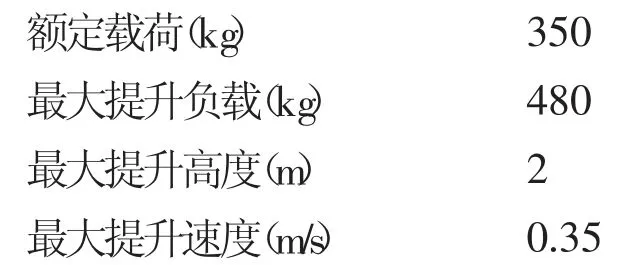
升降作业平台工作技术参数如下:
3 试验情况
3.1 试验地点及方法
机具检测试验参照机械行业标准剪叉式升降平台实验方法(JB/T9229.3-1999)。在新疆生产建设兵团第八师新疆农垦科学院试验场红枣园进行升降平台的行走、升降、采摘、修剪等试验[4],测试机具基本作业运行情况、工作的安全性、液压系统的稳定性和油缸配置合理性。试验场地地表平整,果园行间距3.5 m,果树平均高度3 m。随机选择5段,每段测试距离长度250m。
3.2 基本功能测试
在第八师新疆农垦科学院机械装备研究所棉花生产全程机械化基地示范园区对样机进行平地性能测试,如图2。工作平台和载物料斗升降平稳,到达最高位置时无冲击力。工作平台左右两侧翼板展开、收回顺利,无卡滞现象,平台承重达到480kg时仍能正常升降。

图2 性能测试
3.3 行驶测试
在硬质地面上把高低速切换手柄调至高速位,调速范围0~8.5 km/h,调速方式采用操控手柄无极调节,加速明显,加速过程中发动机噪音仅少许增大、少量烟雾喷出,无停机息火现象。
3.4 转弯半径测试
测试共分为4组,前进和后退方向各分为左右两组。车速采用低速状态,转弯时方向盘旋转至最大角度,以外侧轮胎作为标记,在地面形成车轮转弯半径行驶轨迹,便于进行实地测量。样机在前进和后退过程中转弯半径皆小于4m,转弯半径差异不显著,完全达到设计要求。
3.5 爬坡、驻坡测试
在坡度为150°的路面上以正常行驶速度4 km/h进行前进档位上坡、下坡,倒退档位上坡、下坡,中间坡路停驻性能测试。测试结果机具上下坡正常行驶,坡面停留5min无滑坡现象。
3.6 果园升降作业测试
在新疆生产建设兵团第八师石河子市新疆农垦科学院试验场红枣园进行行走、调头转向及果实采摘作业等实地测试,作业时机具和果树枝条没有相互碰撞现象,证明车体形状和空间尺寸设计科学合理,符合现代园艺实际要求。发动机功率大小适应果园工作环境,行走时底盘与地面无磕碰现象,前方工作平台升降高度满足作业要求,后方料斗提升货物稳定顺利。2人站在工作平台上加上负重可平稳升降和行驶,平台左右两侧伸展和缩回顺利,无卡滞现象,经目测观察未发现高空作业安全隐患。
4 结果与分析
采摘试验所选枣树高度2.75~3.52 m,树冠幅宽2.96~3.89m[5],实际测量果实距离地面高度在3.5~4.0 m之间,主要集中于树冠中间部位。作业平台距离地面1.5 m进行作业时果树的采净率为79.56~100%,平均采净率约为89.78%;距离地面2m进行作业时果树的采净率为61.85~87.56%,平均采净率约为74.71%。由此可见,对于矮砧密植型果园,升降平台距离地面1.5 m时采摘效果较好。而对于普通果树,可适当增加平台与对面的相对高度以减小机具对枝叶和果实的碰撞损伤。由实际作业时果树高度、间隔距离和树冠形状等判断,距离地面1.5~1.7m为升降平台较优工作高度。
5 结论
(1)升降平台外形尺寸和功率大小完全适用于现代果园管理作业,升降平台高度为1.5~1.7 m时工作效率最佳,与人工作业相比较,效率提高约75%,而且通过优化改进有进一步提高的空间。
(3)整机结构紧凑、布局合理,燃油消耗量低,转弯半径小,有利于转向调头,升降平台操作简便方便。液压系统运行稳定,升降、伸展油缸尺寸设计合理,发动机节能高效。
(3)实用性强,便于多人在工作平台上同时进行机械化作业,还可加装各种辅助机械,满足现代果园管理的多种作业需求。高空升降作业时具有安全防护装置,有效保障工作人员安全。