基于手机APP果园作业平台控制系统的设计
2022-07-02翟传龙张国运姚春磊薛龙震张逸飞王思玉
翟传龙,张国运,姚春磊,薛龙震,张逸飞,王思玉,田 园
(山东农业大学机械与电子工程学院,山东 泰安 271018)
0 引言
近年来我国水果产量持续增加,果园面积不断扩大,水果在居民生活中具有重要作用[1]。当前果园采摘大多依靠人工登梯,劳动强度大,安全系数低,果树修枝大多采用人工修剪,效率低下且费时费力。为提高果品质量、提高果园作业效率、增加果农收入,果园机械化问题引起各级政府的重视[2]。然而我国果园大多分布在丘陵山地,地势起伏,传统机械难以满足现代果园发展的需要。果园作业平台的投入使用不仅提高了采摘效率,增加了农民收入,还对提升果园机械化程度有着十分重要的作用[3]。
为解决丘陵果园作业困难的问题,国内学者研发了功能不一的作业平台。樊桂菊等[4]研发了丘陵山区果园作业平台并进行了仿真和实验;买合木江·巴吐尔等[5]研发了全液压动力的多功能自走式果园作业平台;佟嘉玮等[6]以矮砧密植现代果园为载体研发了果园生产多功能遥控平台。针对丘陵山地等复杂地形和果园机械效率低下等问题,王学良[7]等研发了果园履带式多功能作业机,实现了各种作业装置的快速更换。耿佳期[8]等利用Autodesk Inventor三维软件设计了一款轮式果园作业升降平台,并对静力学强度进行了校核与模态分析。以往果园作业多采用人工作业和传统机械作业,这些传统机械虽在一定程度上缓解了果园作业中的繁重工作,但仍存在安全系数小、效率低且操控复杂等问题。本文针对丘陵山区果园树枝修剪、辅助套袋、水果采摘等作业劳动强度大、已有装备易失稳、智能化程度低等问题,基于已研制的果园作业平台研发了可视化人机交互模式的管控系统。提高了丘陵果园作业平台的适应性。
该系统能够利用蓝牙通讯将检测信号与控制信号在传感器与微控制器之间相互传递,从而实现工作台的升降和回转,通过遥控器实现整机的前进、后退和转向,通过两轴角度传感器的反馈实现工作台的调平,完成各种作业集成,使作业效率大大提高,助力果园产业数字化升级,推动乡村振兴。
1 系统结构
基于前期已研制的果园作业平台(图1)研发可视化人机交互模式的数字化管控系统。该系统由角度传感器、电机、单片机、蓝牙模块、电机驱动模块和电推杆组成,系统原理如图2。功能实现的总体流程为:操作人员点触基于Android的手机APP操控界面,通过蓝牙通信模块将指令发送至以STM32单片机为控制核心的控制系统,单片机接收到信号后,控制电机驱动模块进而控制电机的启停和正反转,实现载人平台升降、回转,同时可将采集到的载人平台的倾斜角等信息上传至单片机控制系统作出相应的判断,并对果园作业平台的姿态做出调整,从而实现双向自动调平。
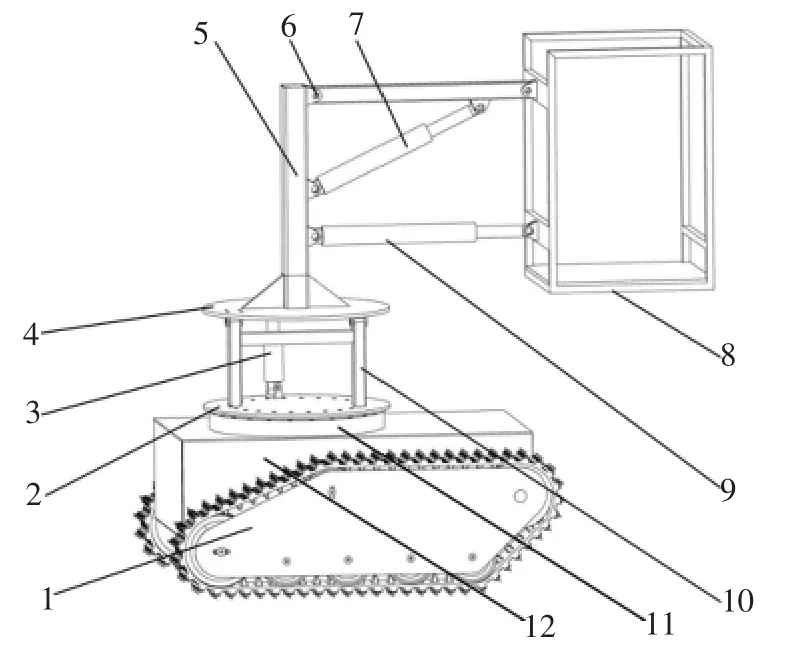
图1 果园作业平台
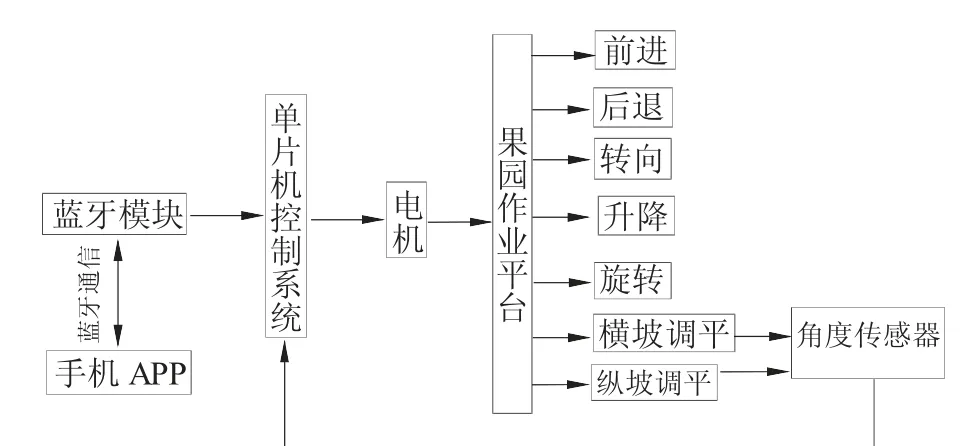
图2 控制系统结构
2 系统硬件设计
系统硬件设计遵循自顶向下的模块化设计思想(图3),主要由蓝牙通信模块、信息采集模块、数据处理模块和调平控制模块组成。信息采集模块用来采集角度,数据处理模块根据采集到的角度进行数据处理,调平控制模块分为横向调平模块和纵向调平模块,可以实现作业平台的横向及纵向调平。

图3 系统硬件设计
单片机系统内存储有控制程序,可用于接收蓝牙通信模块发送的数据,接收角度传感器模块发送的角度值和控制电机驱动模块实现电机运动;单片机控制系统采用STM32芯片,蓝牙通信模块选用HC-05,电机驱动模块采用BTS7960和AQMD6008BLS。
自动调平系统的设计需要用角度传感器进行角度信息的采集,因此角度的采集与处理是整个系统设计的核心,是载人平台保持平稳安全的的重要前提。安装在工作台的角度传感器可实时测量作业平台的姿态角,为保证采集信息准确,信息采集模块采用SINDT02系列的双轴倾角传感器,是新一代数字型小体积MEMS倾角传感器,工作电压5 V~36 V,可在-40~85℃的温度下工作,x轴测量范围为-180°~180°,y轴测量范围为-90°~90°,测量精度为0.1°,波特率9 600 bps。内置加速度计,通过测量静态重力加速度,转换成倾角变化,从而可以测量传感器输出相对于水平面的倾斜角度。内置MCU控制系统使传感器输出线性度得到二次修正,弥补模拟型因为修正不够导致的精度下降。传感器内部采用卡尔曼滤波融合算法,减少了主芯片的工作量,能够直接输出两轴角度,使用高效方便,同时接口采用TTL电平,适用于大部分芯片,便于后期更新换代。角度传感器安装于工作台底座并与单片机相连。
3 系统软件设计
3.1 远程控制系统的设计
图4为远程控制系统的设计流程。远程控制系统主要负责上位机与下位机之间的通信,将上位机发出的指令传给下位机。手机控制APP与蓝牙控制模块建立无线连接,作业人员通过点触手机APP内的按键向蓝牙通信模块发出控制数据。单片机系统通过设置中断,当蓝牙通信模块将接受到的控制数据传送到单片机系统时,单片机系统中断发生,并将控制数据与预设值对应比较。单片机系统得到下一步工作状态后,引脚输出相应的数字量,控制电机驱动模块实现相应的电机运动,然后对应完成平台升高、平台降低、升降停止、平台正转、平台反转、旋转停止等动作,从而实现作业平台的控制。
图4 远程控制系统的设计
3.2 智能检测系统及双向自动调平系统的设计
角度传感器和单片机相连构成智能检测系统,单片机可以读取角度传感器采集到的角度信息,同时可将采集到的载人平台的倾斜角等信息上传至控制系统作出相应的判断,并使作业平台的姿态做出调整。
自动调平流程如图5,单片机向角度传感器发送读数据指令并等待角度数据返回,待单片机系统接收到数据后,先将其存入数据缓冲区,避免数据丢失。单片机系统接收完成后将接收的角度数据进行解算校验后得到真正的角度值,然后程序将X轴与Y轴的角度与设置的安全值区间进行比较判断,若角度值在安全值区间内,则单片机系统向角度传感器发送请求指令,重复上述步骤;若角度值大于安全值区间,则根据正负计算角度差值,按照一定的比例关系将其转化为时间,单片机按照该时间控制引脚输出数字量,以减小角度差值的趋势控制电推杆运动,单片机系统执行完该时间内的数字量输出后,输出数字量控制电推杆停止运动,随后单片机系统向角度传感器发送请求指令,重复上述步骤。若角度值小于安全值区间,则根据正负计算角度差值,按照一定的比例关系将其转化为时间,单片机按照该时间控制引脚输出数字量,以增大角度差值的趋势控制电推杆运动,单片机系统执行完该时间内的数字量输出后,输出数字量控制电推杆停止运动,随后单片机系统向角度传感器发送请求指令,重复上述步骤循环执行程序,实现纵坡与横坡双向调平。

图5 自动调平系统的设计
4 手机APP控制系统界面
图6为人机交互模式的手机APP操控界面。该操作系统分为蓝牙连接和平台控制两部分,通过蓝牙连接可打开或关闭蓝牙。另外,操作人员可通过Android手机APP和遥控器来实现对作业平台的控制,包括整机前进、后退、转向和工作台升降、回转以及通过两轴角度传感器的反馈实现工作台的调平,提高了地形适应能力。

图6 人机交互界面
5 结论
本文创新点在于单片机系统可根据角度反馈值与蓝牙信号实现对作业平台的控制,以及将开发的Android手机APP应用于单片机控制系统中。
(1)针对目前存在的果园作业智能化程度低、安全系数及工作效率低等问题,基于已研发的果园作业平台设计了一种可视化人机交互模式的管控系统,该系统提高了果园作业平台的智能化程度和农机农艺融合度。
(2)远程控制系统以单片机为控制核心,通过手机与蓝牙模块进行通信,单人操作即可控制整机前进、后退、转向及工作台升降、回转,实现了果园的灵活作业,完成果枝修剪、疏花疏果、套袋和采摘等作业的集成,达到解放人力的目的。
(3)智能检测系统和双向自动调平系统可实现“纵向+横向”双向自动调平,使得平台即使在坡面上工作时载人工作台仍可保持水平状态,该系统提高了作业人员的安全系数,对降低果园作业安全隐患具有重要的意义。