基于Carsim和Simulink联合仿真的汽车操纵稳定性评价
2022-07-01候峙朴陈佳峻
毕 锟,范 英,候峙朴,陈佳峻
(太原科技大学 交通与物流学院,山西 太原 030024)
随着汽车普及率和人们对生活质量要求的不断提高,汽车用户对汽车的各方面性能要求也越来越高,其中极其关键的一项就是提高车辆的操纵稳定性,车辆的操纵稳定性是汽车主动安全领域的研究热点,也是汽车整车试验的一个重要方面。
汽车的操稳性评价方法包含有主观评价和客观评价两个方面。主观评价是车辆进行操纵稳定性试验后,由具有丰富的驾驶经验的驾驶员或者教练对车辆的各项指标和性能进行的评价打分,具有很大的主观性。客观评价是根据实车试验或车辆模型仿真得到的数据,参照现行的评价标准进行定量评价[1]。Li[2]基于Trucksim仿真平台,构建了车辆模型,选择方向盘转角阶跃试验工况,通过改变部分车辆结构参数对车辆操纵稳定性进行了分析。Cao[3]分析了行驶速度、轮胎侧向刚度、质心位置、前轮转角对汽车操纵稳定性的影响,用Matlab软件绘制了相应的曲线,并对汽车操纵稳定性进行了仿真研究。Wang[4]利用ADAMS/Car软件构建了车辆虚拟样机模型,对转向角阶跃输入试验、转向角脉冲试验和蛇形试验三种试验方案进行了仿真,分析了液压混合动力汽车的操纵稳定性。张义花[5]基于双挂汽车列车建立了二自由度车辆动力学模型,分析计算了RWA值,分析研究了双挂汽车的操纵稳定性评价指标,并与国外的相关研究进行对比,研究结果可为确定和应用双挂汽车操稳性评价指标的相关研究提供一定的参考。汽车操纵稳定性的主观评价在整车和底盘的相关研究中具有重要意义,任成龙[6]选用了15个操纵稳定性评价指标,并确定了各项指标的权重,运用灰色关联分析的方法,参考熟练驾驶员主观评价,对试验车进行操稳性评价,验证了该方法在操稳性评价方面的可行性。郝西祥[7]在ADAMS软件上使用某越野车的实车参数建立了该车的整车仿真模型,选用汽车操稳性的评价实验进行仿真,对比仿真和实车试验结果,最后优化了稳态回转特性。李志魁[8]对选用的试验车进行各个子系统的特性相关试验,使用试验结果数据在Carsim中建立整车模型,并进行了操纵稳定性试验和评价,对仿真模型进行了仿真,与实车试验结果对比分析,验证了模型的准确性。
本文以某国产车为研究对象,采用Matlab/Sinulink工具在二自由度模型的基础上又考虑了车辆的侧倾特性,建立了三自由度车辆模型,通过与Carsim联合进行模型仿真试验,并与实车试验结果进行对比分析,然后依据QC/T 480—1999中的评价准则评价计分,综合评价汽车的操纵稳定性。
1 整车动力学建模
1.1 二自由度模型的建立
在汽车运动过程中,忽略空气动力、转向系统和悬架的影响,以前轮转角作为输入;驱动力不大,不考虑地面切向力对轮胎侧偏特性的影响;假定汽车只作平行于地面的平面运动。汽车被简化为一个只考虑横摆和侧向两个自由度的两轮车辆模型[9],如图1所示。

注:O点—车辆的质心;a—车辆前轴距质心的距离,m;b—车辆后轴距质心的距离,m;L—轴距,m。图1 简化后的两轮汽车模型Fig.1 Simplified two-wheeled vehicle model
简化的二自由度车辆模型受到的外力沿y轴方向的合力与绕质心的力矩和为
(1)
可以得出车辆的线性二自由度模型动力学方程为
(2)
1.2 三自由度模型的建立
虽然二自由度模型能够基本反映车辆的运动特性[10],但是考虑到汽车在实际道路行驶过程中总会出现侧倾现象,而侧倾运动与横摆运动之间有着直接的联系,所以对车辆的转向特性就会产生较大的影响,进而影响汽车的操纵稳定性能,针对这一问题,建立了包括车辆侧倾、侧向和横摆三自由度的车辆模型,该模型更加贴近现实生活中行驶的汽车,对操稳性研究具有重要意义,图2所示为车辆三自由度模型。

图2 简化的车辆模型Fig.2 Simplified vehicle model
经过受力分析,得到三自由度模型的动力学方程如式(3),当轮胎的侧偏角较小时,轮胎的侧偏特性基本呈线性,从而得出轮胎的侧偏力为式(4)。
(3)
(4)
将公式(4)代入公式(3)可得
(5)
式中:m—整车质量,kg;ms——簧载质量,kg;ωr—横摆角速度,°/s;u—车辆速度,m/s;φ—车身侧倾角,°;δf—前轮转角,°;p—侧倾角速度,°/s;β—质心侧偏角,°;Ff、F—前、后轮侧偏力,N;a、b—车辆前后轴到质心的距离,m;h—簧载的质心到侧倾轴的距离,m;Ix—整车绕侧倾轴的转动惯量,kg/m2;Iz—整车绕横摆轴转动的转动惯量,kg/m2;Ixz—簧载的惯量积;df、dr—车辆前后悬架侧倾角阻尼,N/(m·s-1)。
1.3 Carsim车辆模型的建立
Carsim通过输入车辆的各项特性参数建立车辆的整车模型并仿真得出结果,是车辆动力学仿真的一款常用软件,Carsim整车模型悬架选取:前悬架选用麦弗逊式独立悬架,后悬架选用扭力梁式非独立悬架;空气动力学参考长度2 600 mm,车辆的横截面积2.54 m2;采用直接速度控制方式控制车辆,实验车的发动机最大功率是80 kW;前后轮胎规格是185/65 R15,制动系统、转向系统、轮胎模型其他参数均采用Carsim中的缺省参数。通过对试验车的测量和参考相关文献,得到车体模型主要参数,包括车体尺寸参数、质心位置、转动惯量和前后轮胎的静载半径,具体参数见表1所示。

表1 车体参数表Tab.1 Table of car body parameters
2 联合仿真的实现
在MATLAB中,Simulink是用来建模、仿真和分析动态多维系统的交互工具,可以单独实现建模和仿真,还可以与Carsim联合完成更多的仿真分析任务。Carsim中自带了Simulink内嵌模块,Carsim和Simulink之间可以进行数据之间的实时互换。通过嵌入模型的Simulink S函数可以在Simulink中建立一个相应的Carsim S-function模块,构建Carsim和Simulink的联合仿真模型[11]。
Carsim和Simulink联合仿真需要Carsim输出变量到Simulink中,应用于自定义的模型,实现Carsim整车模型和Simulink模型联合。本文中Carsim输出到Simulink中的变量包括:车速和方向盘转角,建立的联合仿真模型如图3所示。

图3 Carsim和Simulink联合仿真模型Fig.3 Carsim and Simulink joint simulation model
3 模型验证
为了验证模型的准确性进而得到较好的实验结果。采用双移线试验工况,以60 km/h的车速进行仿真和实车试验,整个试验过程尽量保持一致,反复进行三次试验,通过实验仪器记录试验过程的各项数据,模型仿真结果和实车试验结果对比如图4图5所示。
由图4、图5可知,当实车和模型进行双移线试验时,评价指标的响应曲线可以得出,三自由度车辆模型比二自由度模型更加贴近实车,为了量化三自由度模型的优越程度,求出了其均方根值,如表2。

图4 质心侧偏角对比图Fig.4 Comparison of sideslip angle of centroid

图5 横摆角速度对比图Fig.5 Comparison of yaw velocity
双移线仿真试验重点关注质心侧偏角和横摆角速度随时间的变化。由表2可知,三自由度模型和二自由度模型与实车相比,三自由度模型的两项评价指标RMS值均低于二自由度模型,与实车的误差分别为3.69%和3.61%,误差较小,且响应曲线的整体趋势与实车基本一致,验证了仿真模型的可行性。

表2 RMS值对比表Tab.2 Comparison table of RMS values
4 实车试验及评价
本文的实车试验仪器包括IMU04陀螺仪、TR60方向盘、DSP03多功能显示器、文件管理器、VBOX模拟量采集系统、笔记本电脑。根据仪器说明书要求,将各仪器设备安装好,在笔记本电脑上完成方向盘、双天线和陀螺仪等设备相关参数的设置,试验场地按图6布置。

图6 蛇形试验标桩布置图Fig.6 Serpentine test pile layout
实验车辆为某国产轿车,试验场地为平坦干燥的沥青路面,各实验条件均符合标准。试验过程严格按照GB/T 6323—2014进行,试验方法选用车辆操纵稳定性典型试验方法蛇形试验[12],分别以30、40、50、60 km/h的速度通过试验场地,利用实验仪器采集数据,试验场景如图7所示。

图7 蛇形试验现场Fig.7 Serpentine test site
图8和图9显示了蛇形试验的方向盘转角和横摆角速度与汽车车速的关系曲线。实验车辆速度为30、40、50、60 km/h时的试验数据如表3。

表3 实验结果Tab.3 Experimental results
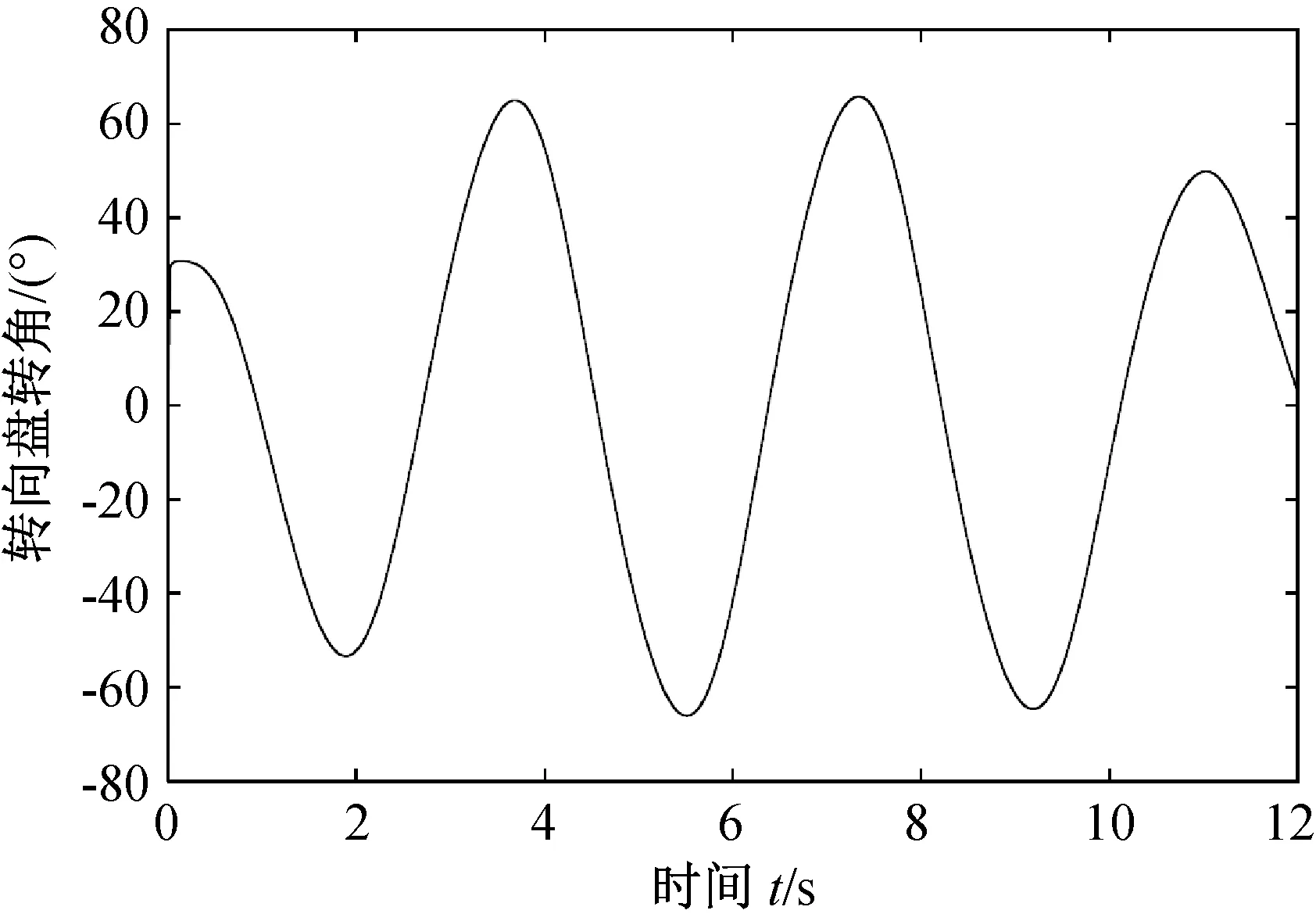
图8 实车试验转向盘转角曲线Fig.8 Steering wheel angle curve for real vehicle test

图9 实车试验横摆角速度曲线Fig.9 Yaw velocity curve for real vehicle test
依据QC/T 480—1999中的评价准则,按照不同车速下的平均横摆角速度峰值和平均方向盘转角峰值进行综合评价计分[13]。
(1)平均横摆角速度峰值γ评价计分
(6)
式中:Nγ—平均横摆角速度峰值的评价计分值;γ60—平均横摆角速度峰值的下限值,(°/s);γ100—平均横摆角速度峰值的上限值,(°/s);γ—平均横摆角速度峰值的实验值,(°/s)。
(2)平均方向盘转角峰值θ评价计分
(7)
式中:Nθ—平均方向盘转角峰值的评价计分值;θ60—平均方向盘转角峰值的下限值,(°);θ100—平均方向盘转角峰值的上限值,(°);θ—平均方向盘转角峰值的实验值,(°)。
(3)蛇形试验中,未达到基准车速60 km/h的车辆,Nγ和Nθ按下式计算:
(8)
式中:Vm—实际车速,km/h;Vn—基准车速,km/h。
(4)综合评价计分值由下式得出
(9)
式中:Ns—蛇形工况的综合计分值。
5 模型仿真分析及评价计分
5.1 模型仿真结果
为了在Carsim中重现实车试验场景,首先要设置标桩的间隔距离和位置,车辆行驶路径和车速,按照GB/T 6323—2014在Carsim中设置车辆行驶路径如图10。
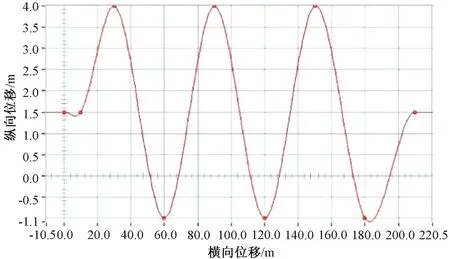
图10 车辆行驶路径Fig.10 Vehicle driving path
蛇形试验重点关注横摆角速度、转向盘转角在不同的车速下与时间的变化关系[14],仿真结果如图11—图13所示。

图11 横摆角速度响应Fig.11 Yaw angular velocity response
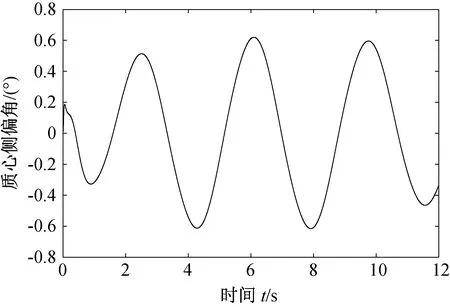
图12 质心侧偏角响应Fig.12 Sideslip angle of centroid response

图13 转向盘转角响应Fig.13 Steering wheel angle response
5.2 仿真数据处理及评价计分
5.2.1 仿真数据处理
(1)平均横摆角速度
(10)
式中:γj—有效仿真曲线的横摆角速度极值。
(2)平均车身侧倾角
(11)
式中:φj—有效仿真曲线的车身侧倾角极值。
(3)平均转向盘转角
(12)
式中:δj—有效仿真曲线的转向盘转角极值。
(4)平均侧向加速度
(13)
式中:ayj—有效仿真曲线的侧向加速度极值。
仿真数据通过上述公式进行处理,最终得到的仿真数据如表4所示。

表4 仿真结果数据Tab.4 Simulation results
5.2.2 评价计分
使用上述评价计分准则对模型仿真数据和实车试验数据进行评价计分,最终评价结果如表5所示。
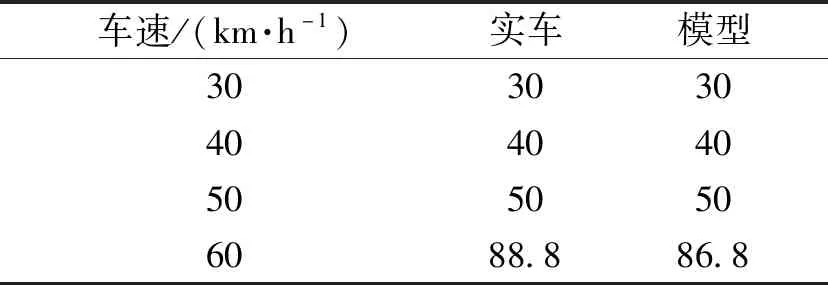
表5 评价计分值对比表Tab.5 Comparison table of evaluation score values
由表5可知,在基准车速下,实车试验评价得分为88.8分,整车模型试验评价得分为86.6分。在不同车速下,综合评价计分:模型仿真试验得分为51.65分,实车试验为52.2分,结果表明实车试验评价得分与三自由度模型仿真试验评价得分十分接近。
6 结论
对二自由度模型和三自由度模型进行了双移线实验,对比分析其质心侧偏角和横摆角速度响应曲线,通过分析可知,三自由度车辆模型的仿真效果明显优于二自由度模型。针对汽车操纵稳定性的蛇形试验工况分别进行模型仿真和实车试验,并依据QC/T 48—1999中的评价准则,完成对两者实验结果的综合评价,结果表明三自由度模型仿真试验评价得分和实车试验评价得分十分接近,更加贴近实车试验,能够更好地研究汽车的操纵稳定性,对汽车在操纵稳定性能方面的研究提供一定的参考意义。
