高性能星球车车轮研究进展
2022-06-29袁宝峰朱建中金敬福倪文成
王 康, 袁宝峰, 朱建中, 金敬福, 倪文成, 邹 猛∗
(1.北京空间飞行器总体设计部, 北京 100094; 2.吉林大学工程仿生教育部重点实验室, 长春 130022)
1 引言
随着中国嫦娥探月工程和天问火星探测任务的顺利实施,载人月球探测和火星采样返回将成为中国未来深空探测的重点。 轮式星球车作为深空探测的主要平台和重要载体,其移动系统相关理论和技术的攻关非常关键。
月球表面覆盖有一层松软的月壤风化层,且昼夜温差高达300 ℃,太阳风粒子辐射最高达380 mSv,气压几乎为零;火星表面除覆盖着一层松散的火星风化层,还分布着各种不同地形,包括高原、山谷、沙丘和陨石坑,还有大约14%~20%的面积被各种大小的岩石所覆盖,昼夜温差140 ℃,气压不到地球大气压的1%。 星球恶劣的行驶环境对星球车的通过性能提出了更高的要求。
星球车车轮不仅要起到承载作用,还要为车辆提供足够的驱动力和转向稳定性,适应松软的地形。 开发高性能的星球车车轮是移动系统设计的关键,也是影响探测任务的难点。 目前星球车均采用轮式移动系统,以金属刚性车轮为主。 但随着深空探测的发展,刚性轮逐渐不再适应高性能星球车的发展趋势。 金属弹性车轮在高速、重载和大范围运行工况下,具有舒适性好、通过性高、节能等优点,并且具有全地形适应性。 然而,弹性轮的开发除了受到星球环境、发射质量和空间等限制外,弹性轮自身的强度和结构也是车轮开发的难点。
本文面向未来月球车或火星车大范围移动需求,探讨解决星球车弹性车轮的理论、设计、优化、仿真及试验研究现状,并提出中国高性能星球车车轮研究的建议。
2 研究现状
迄今,人类已经成功发射至月球和火星上的星球车共计13 辆,其中发射到月球的有7 辆:3辆美国的LRV(Lunar Roving Vehicle),2 辆苏联的Lunoknod 和2 辆中国的玉兔号月球车(Yutu)。发射到火星的有6 辆:其中5 辆由美国发射,分别是索杰纳(Sojourner)、勇气号(Spirit)、机遇号(Opportunity)、好奇号(Curiosity)和毅力号(Per⁃severance),另外1 辆是我国于2021 年5 月22 日成功到达火星表面开展巡视探测的祝融号火星车。
除了这13 辆星球车之外,美国还制造了一种两轮无动力推车MET(Modularized Equipment Transporter),用来运输Apollo 14 号上的设备和航天员收集的月壤样本。 以上月球或火星车的移动系统,均为轮式移动系统。
2.1 月球车车轮
LRV 作为载人月球车,4 轮4 驱,满载质量为700 kg(车重为210 kg),最大速度为16 km/h,行驶里程28 km,见图1(a)。 车轮为柔性编织轮(Flexible Wire Mesh Wheels),轮径为0.82 m,轮宽为0.23 m,胎面由镀锌高碳钢丝编织而成,通过钛合金框架与铝合金的轮毂相连,且车轮表面有人字形的钛合金齿片,覆盖面积达到50%,见图1(b)。 LRV 车轮的柔性胎面能够吸能减震,胎壁侧偏刚度适中,通过性和舒适性优异。 但是,车轮也具有一定的缺陷,比如编织轮面工艺复杂,强度低,寿命短,可靠性差,尤其是受到冲击时胎面易破损。
图1(c)所示的MET 无动力推车,满载时约为75 kg,速度最高可达4 km/h。 它的车轮由橡胶制成,由充满氮气的内胎支撑,胎压为10.3 kPa。 车轮直径为0.406 m,宽为0.102 m,见图1(d)。 充气轮胎弹性好,运行平稳,但是在恶劣的月球环境下,橡胶易老化、开裂,甚至爆胎,所以后续没有应用到其它星球车上。
图1 美国月球车及其车轮[8]Fig.1 Lunar rover and its wheels of USA[8]
Lunokhod-1 是第一台成功登陆月球的无人探测车,8 轮,轮径为0.51 m,轮宽为0.2 m,重为800 kg,最大速度为2 km/h,行驶了10.5 km,见图2(a)。 Lunokhod-1 车轮为带有履刺的筛网轮,轮毂和轮面采用辐条连接,见图2(b)。 网状轮面配合柔性辐条具有一定的减振功能,但是无法吸收较大振动能量,因此仅适用于低速运动。 中国的玉兔号和玉兔二号月球车(图2(c)),采用的是带履刺的筛网轮,见图2(d)。 该车轮质量轻,进入车轮内的月壤颗粒易于从轮面漏出,避免月壤堆积,履刺结构能够提高牵引性能。 然而,筛网轮面强度低,弹性差,且易于变形。
图2 无人月球车及筛网轮Fig.2 Unmanned lunar rovers and mesh wheels
2.2 火星车车轮
索杰纳火星车是目前为止最小的星球车,质量为11.5 kg,6 个车轮,首创了摇臂式悬架,轮径为0.13 m,最大速度为0.4 m/s,仅行驶了100 m。索杰纳采用刚性车轮,表面布满钉齿结构,以增大车轮的驱动力。 车轮表面涂布有黑色的涂层,以增加耐磨性,见图3(a)所示。 该车轮重量轻,结构简单,轮面的钉齿可以增大车轮牵引力,车轮具有较好的越障和爬坡能力。 然而,由于钉齿的存在,车轮的平顺性较差。
图3 美国火星车及车轮Fig.3 Mars rover and its wheels of USA
机遇号(勇气号)火星车,质量为180 kg,6轮,轮径为0.26 m,最高车速为1.8 km/h,共行驶了45.16 km。 该车轮采用轮履整体式结构,如图3(b)。 车轮主体采用铝合金材料,螺旋式轮辐中间填充了具有弹性的泡沫,具有一定的减振功能,并且可防止沙砾进入车轮内部。 鼓形轮面有利于转向,表面经过热处理以增加强度和耐磨性,轮面表面带有沟槽式的轮刺,以增大车轮牵引力,勇气号的车轮与机遇号相同。
好奇号质量为899 kg,6 个车轮,轮径为0.50 m,轮宽为0.40 m,轮面厚为0.75 mm,轮刺为V 形,高为7.5 mm。 好奇号车轮的轮面采用柔软的阳极电镀铝,该材料有较好的减振性能;由钛合金材料制成的弯曲轮辐,具有较好的吸能作用,提高了车轮的平顺性和舒适性。 然而,由于轮面强度低、耐磨性能差,使得车轮在使用中出现了多处磨损和破洞,见图3(c),导致后续探测难以长距离行驶。
毅力号火星车于2020 年7 月30 日发射,2021 年2 月19 日在火星杰泽罗陨坑(Jezero)着陆。 毅力号移动系统设计时,充分继承了好奇号,但由于好奇号车轮被火星尖锐石块损坏,导致其移动性能受限。 毅力号火星车设计时重新设计了车轮。 毅力号车轮相较于好奇号宽度变窄,直径变大,轮面厚度变厚(为好奇号2 倍厚度)。 车轮由整块航天级铝合金洗削加工而成,轮辐材料为高强度钛合金。 另外,毅力号车轮具有48 条直线型轮刺(好奇号为24 条V 形轮刺),可以减小应力集中,提高其耐久性,如图3(d)所示。
中国首次火星探测的祝融号火星车在摇臂悬架的基础上,升级采用了主动悬架技术,6 轮驱动、6 轮转向,悬架如图4(a)所示。 车轮选用铝基碳化硅材料,具有高比强度和比弹性模量、良好的耐磨损、耐疲劳与抗蠕变性、热膨胀系数低、尺寸稳定性好等特点。 车轮直径为300 mm,宽度为200 mm,20 个轮刺,最大速度为200 m/h,如图4(b)所示。
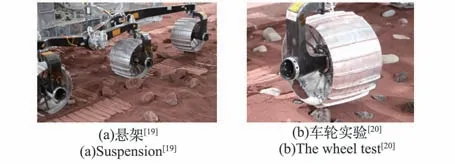
图4 祝融号火星车车轮Fig.4 Zhurong Mars rover and its wheels
3 星球车车轮最新研究
3.1 传统结构
除了已成功发射的星球车车轮之外,国内外开发了大量新型的星球车柔/弹性车轮,包括20世纪美国和苏联在探月过程中的尝试。 主要是由于弹性轮的弹性变形,其平顺性和稳定性优于刚性轮,更适合速度快、载荷重的星球车,如载人月球车。 但由于星球表面大温差、高辐射、低重力和强辐射等苛刻条件,使得橡胶等地面广泛使用的高分子材料难以在车轮设计中采用。 因此,现在星球车弹性车轮研究主要采用金属材料,通过结构和形态设计使其具有弹性,如LRV 的金属弹性车轮。
NASA 和固特异(Goodyear)公司合作开发的一种新型弹簧轮胎,胎体由800 根弹簧编织而成,直径为0.525 m,质量为8.3 kg,最大载荷为736 N,如图5(a)。 通过测试,该轮具有良好的通过性、耐久性和平顺性,NASA 原计划在Mars2020 上采用该轮胎,以解决好奇号车轮存在的耐久性差问题。

图5 美国新一代星球车弹性轮Fig. 5 Next generation elastic wheels for the planetary rovers in USA
米其林(Michelin)公司基于TWEEL 技术(TWEEL 设计理念的核心是用简单的外形完全替代传统的充气轮胎的压缩空气设计,见图5(b)),开发出新一代月球车车轮,其效率是LRV的3.3 倍,如图5(c)所示。 Clemson 大学和Milliken 公司共同开发了该车轮的胎面织物。 相比于其他车轮,该车轮在质量、承载力方面具有较大优势,并且能维持恒定的接地压力,确保月球车具有较高的通过性,NASA 将其用在新一代月球车全地形月球车ATHLETE。
Resilient 公司和威斯康星州大学麦迪逊分校聚合体工程学中心共同开发的仿蜂巢轮胎由六边形结构组成,见图5(d)。 该车轮强度高,载荷分布均匀,平顺性好。
ESA 为ExoMars 火星车设计了一款弹性车轮,车轮直径为250 mm,宽度为100 mm,如图6(a)所示。 该车轮为全金属结构,三排弹性辐条安装在刚性轮毂上,并装有缓冲装置,以防止弹性辐条过度变形引起的滚动阻力和能耗增加。此外,ESA 设计了另一种弹性车轮,该车轮辐条的形状类似正弦曲线,如图6(b)所示。
德国宇航中心DLR 开发了一种金属弹性车轮,见图6(c)所示。 该车轮直径为400 mm,宽度为200 m,由弹性轮面、弹性轮辐、轮毂组成。 轮面上安装轮刺以增大牵引力,内外交错排列的弹性轮辐增大了车轮的弹性,车轮内部有缓冲块防止轮面过度变形。 瑞典吕勒奥理工大学设计了一种兼具旋转刚度和径向柔性的弹性车轮,如图6(d)所示。
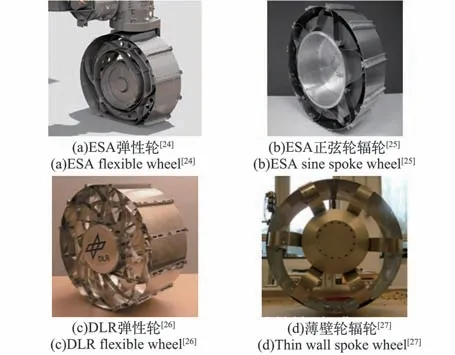
图6 欧盟新一代星球车车轮Fig.6 Next generation planetary rover wheels in EU
图7(a)为英国学者设计的一种离散轮面金属弹性车轮。 车轮形状可以改变以适应不同的地形,从而提高驱动性能,降低能耗。 英国萨里大学设计了一种弹性车轮,车轮的轮辐由螺旋形金属片支撑,间隔的轮辐之间由轮面圆环连接,整个车轮具有良好的吸能和减振性能,如图7(b)所示。
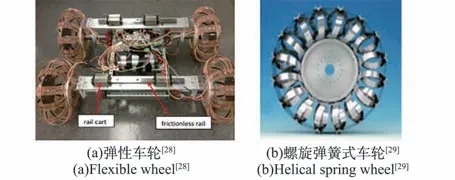
图7 英国开发的弹性车轮Fig.7 The wheels for the planetary rovers in UK
俄罗斯研制的LRMC(Lunar Rover Mockup Chassis)装备有4 个金属弹性车轮,如图8(a)所示。 该车轮由钛合金材质制成,单轮额定载荷为40 kg。 间隔的轮辐之间存在较大间隙,在车辆运行过程中沙砾易进入车轮内部。 因此,该车轮不适用于砂砾的环境。 俄罗斯车辆研究所设计的另一种螺旋弹簧概念车轮,如图8(b)所示。该车轮的轮辐由具有弹性的螺旋弹簧片组成,可以显著提高车轮的吸能性能和平顺性。
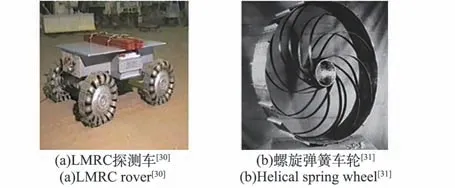
图8 俄罗斯开发的弹性车轮Fig.8 The wheels for the planetary rovers in Russia
日本学者Kojiro 设计了一种弹性车轮,见图9(a),该车轮的轮面为一个大圆环结构,轮毂和轮面通过5 个小圆环轮辐连接。 日本东京工业大学研制一种可以展开的探测车车轮Tri⁃StarIV,如图9(b)所示,车轮主要依靠螺旋的弹性轮辐轮吸能减振。 轮辐和轮面需要电机带动而实现展开,然后通过锁止销锁定。 由于车轮的轮面是离散的,车轮的平顺性较差。 从图中可以看出,可展开车轮结构较复杂,可靠性差,并且展开过程需要提供动力。
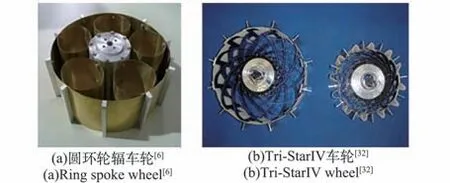
图9 日本设计的新型星球车车轮Fig.9 The wheels for the planetary rovers in Japan
加拿大麦吉尔大学(McGill University)研制了金属薄壁管弹性车轮。 在轮面与轮毂之间,加装了5 个薄壁圆筒,并在光滑轮面上,安装有10个V 型轮刺,但由于采用的金属板壁厚较大,车轮的变形小于轮径的10%,如图10(a)。 另外,麦吉尔大学还研制了另外一种柔性车轮,见图10(b),该车轮的轮面由16 块金属板铰接而成,轮辐为U 型金属板,用于连接轮面和轮毂,通过在金属板设置网孔进行减重。 图10(c)为加拿大空间局设计的一种一体式金属弹性车轮。 印度ISRO 卫星中心研制了一款正反螺旋弹簧车轮,并进行了单轮土槽测试。 美国密西根州立大学利用仿生复合材料制造了一种负泊松比车轮,如图10(d) 所示,并进行了理论分析和试验。
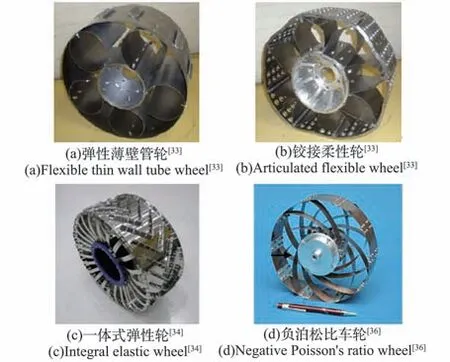
图10 新一代柔性巡视器车轮Fig.10 Next generation flexible wheels for planetary rovers
国内哈尔滨工业大学设计了一种由薄金属片组成的弹性车轮,该车轮可以通过变形收缩以节省运载空间。 北京空间飞行器总体设计部和吉林大学联合设计开发了面向载人登月的大尺寸金属弹性车轮,如图11 所示。 车轮直径为1200 mm,宽度为500 mm,最大承载为7500 N,材料由高强度弹簧钢经热处理加工而成。

图11 大尺寸载人车车轮[38]Fig.11 Large⁃size wheels for manned lunar rover in China[38]
吉林大学研发了一款可伸缩叶片复式步行轮,能够提高车轮在月壤上的通过性。 北京航空航天大学设计了一种可变直径的半步行轮,车轮直径的改变通过调整弹簧片来实现。 以上研究仍处于实验室探索阶段,在理论和技术上仍需进一步研究。
3.2 异形结构
为解决巡视探测车辆的越野机动性能,国内外学者利用各种新技术和结构对星球车移动系统(车轮)进行了探索。 通过模仿犰狳,日本大阪大学设计了一种轮/腿变换式机器人,在良好路面行走时,采用轮式结构;在崎岖地面行走时,机构变化为腿式,见图12(a)。 为提高机器人在沙漠的通过性,佐治亚理工学院Goldman 等设计了6 轮机器人Sandbots,该机器人借鉴了沙漠中蜥蜴运动方式,见图12(b)。 凯斯西储大学的Dunker 等设计了一种具有凹面脚的轮腿式机器人,这种设计将机器人的重量分配于更大的表面积上,减少了机器人的沉陷,见图12(c),萨里大学的Comin 等也进行了类似研究。
2005 年开始,NASA 根据六足动物运动特点,研制了全地形六腿行星探测车(ATHLETE),见图12(d)。 该探测车采用轮腿结合方式,每个腿的末端都有一个车轮,车轮锁止后可以用作脚,用于穿越松软地形, 也可以用于攀爬陡峭的地形。 另外,NASA 对于柔/弹性车轮的研究始于Apollo 计划,设计了多种薄壁弹性轮,见图12(e)和仿生步行足等结构,但由于性能不满足载人月球车要求,都没有应用。 到目前为止,NASA 仍在研制小型无人巡视器和大型载人巡视器的弹性轮,并发展其设计理论和试验技术。
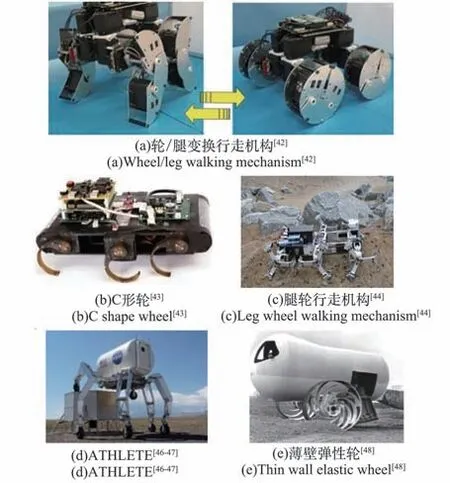
图12 仿生轮与行走机构Fig.12 Bionic wheels and running gear
3.3 其他车轮
目前,地面车辆主要使用橡胶充气弹性车轮,但近些年为了提高充气车轮的安全性,国内外多家单位开始研制免充气车轮。 除了米其林(Mich⁃elin)的Tweel 和Resilient 技术公司的仿生蜂巢车轮之外,还有一些免充气弹性车轮的结构,可借鉴用于星球车车轮研制。 如澳大利亚Big Tyre 公司研发的前后扇形辐板交错结构,如图13(a)所示;日本普利司通公司采用高性能热可塑性树脂设计的交错辐射式结构,见图13(b);韩泰轮胎公司由聚氨酯材料制成的不规则蜂巢结构,如图13(c)所示;美国Goodyear 设计制造的鱼叉形结构的非充气式车轮,目前已经投产使用,如图13(d)所示。

图13 新型免充气轮胎Fig.13 New inflation⁃free wheels (tyre)
中国对非充气车轮的研究也有所开展,如2014 年,北汽股份联合马正东团队研究出一种非充气轮胎,如图14(a)所示。 该轮胎将负泊松比单元组成受压和受拉机构,轮面覆盖有橡胶材料,中间为刚性轮毂。 北京化工大学和山东玲珑轮胎共同开发制造了一款非充气新结构弹性车轮,如图14(b)所示,利用试验台架进行了三向刚度、滚动阻力等测试,结果表明该轮胎具有操控性好、阻力小等优点。
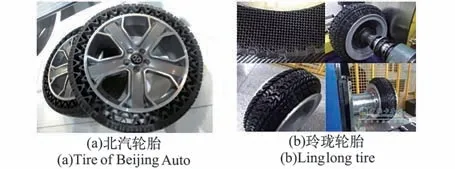
图14 国内免充气轮胎[53]Fig.14 New inflation⁃free wheels (tyre) in China[53]
4 发展趋势与展望
4.1 发展趋势
目前,移动系统主要有轮式、履带式和腿式3种,轮式移动系统以其高效、平稳、简单的特点目前应用最为广泛,而腿式移动系统的越障通过性能最为优异,履带式移动系统的性能则介于两者之间。 轮式探测器是目前和很长一段时间内探测器的大方向,但在未来的发展中,巡视器和工程车辆的移动系统应是轮式、履带式和腿式并存和互补的格局。
现有星球车的车轮可分为刚性轮、柔性轮和弹性轮,材料以铝合金等金属材料为主。 由于刚性轮技术成熟,结构简单,可靠性高,承载能力强,在无人星球车上得到了广泛应用。 但是由于减振性能弱、平顺性差等,限制了其大范围移动星球车上的应用,而弹/柔性车轮可以很好地克服刚性轮的缺点。 但弹/柔性车轮的开发仍然存在诸多问题,如何开发出结构简单、可靠性高、通过性好的弹性车轮为未来研究的热点。
为解决上述问题,需要研究适应地外行星复杂表面环境的巡视器弹/柔性车轮,使整车满足通过性、平顺性和稳定性要求。 现有研究主要集中在以下3 个方面:①材料上研发适合深空环境的复合材料或高分子材料,开发高强度金属减振吸能材料,如记忆合金;②结构上在车轮中增加弹性缓冲元件或采用薄壁结构;③构形上研发异形或可拓展结构车轮。
这些方法各具优缺点,但在解决质量-环境-材料-性能上还存在一定难度,特别是由于要具有弹性,车轮外壁一般采用薄壁结构,从而使其承载能力和强度降低,并且耐磨性差,这也是现有巡视器弹性车轮存在的主要问题。 国内各种弹性轮结构复杂,质量较大,而国外研究多处于原理性试验阶段且技术保密。 因此,提出一种创新的具有自主知识产权的巡视器弹性轮设计理论和方法十分必要。
4.2 评价体系
高性能星球车车轮设计是一项系统工程,直接关系到星球车移动的各项性能,在设计过程中需要综合考虑星球车对星表适应性、探测机动性、质量尺寸约束等。 如无人巡视探测器一般尺寸和结构偏小,探测速度较低,移动系统设计过程中更为关心车辆的通过性,从而在车轮设计过程中轮刺与接地压力是2 个重要指标,反而对车轮弹性要求较少。 而载人星球车由于有航天员参与驾驶,结构和尺寸偏大,速度较快,因此,设计过程中更关心其平顺性和安全性,这也就要求车轮具有较好的弹性。
但总体上,车轮设计需要考虑以下指标:质量、通过性、刚强度、平顺性、环境适应性、使用寿命、安全性。 在针对载人车车轮设计过程中,其权重建议如表1 所示。
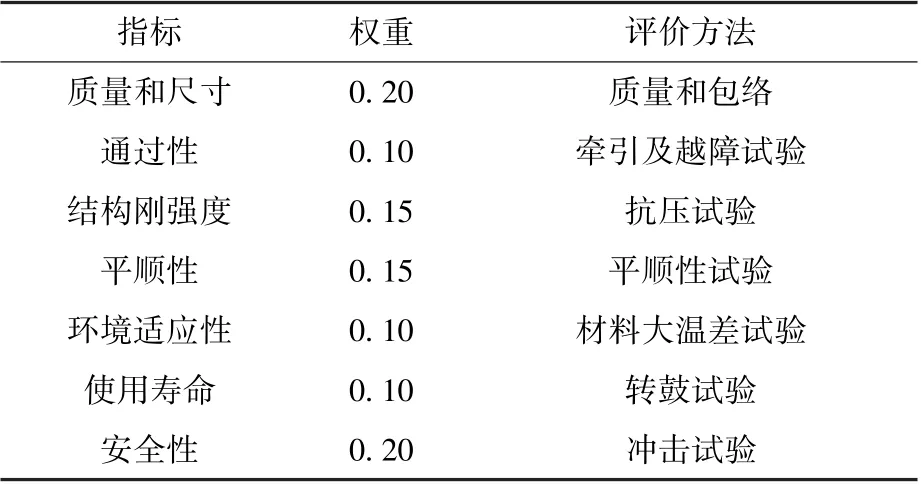
表1 载人车车轮评价体系Table 1 Evaluation system for the wheels of manned planetary rovers
4.3 建议与展望
随着着陆巡视探测和载人探测需求的增加,星球车车轮的发展必将是由刚性轮向弹性轮转变。 另外,未来星球车的发展方向是高速、载人、重载、大范围机动和全地形适性,这些都对探测车辆的移动系统特别是车轮提出了更高的要求。 中国要想在未来的深空探测和开发中具有领先位置,必须要在核心部件的研发上进行创新。
解决弹性轮开发难题的根本是材料,但研发适应深空环境的橡胶或弹性复合材料,周期长,经费高。 因此,国外在新型高性能车轮研究过程中,一方面采用新材料,另一方面主要采用金属材料,通过结构设计和优化实现车轮性能的提升。 结构优化主要有以下2 种方法:
1)薄壁结构。 利用金属弹性实现连续的弹性变形,如图15(a)所示弹性轮辐车轮,其轮辐和轮面设计为一体结构,当车轮受到压力产生形变时,轮辐与轮面同时产生弹性形变,减少轮辐与轮面连接部位的应力集中,且内部有刚性支撑架,可以防止车轮过量形变。 该车轮结构简单、弹性变形可靠、性能稳定,但需要考虑强度和寿命。
2)异形结构。 如图15(b)所示仿生步行金属弹性轮。 该轮为仿生步行足设计,采用分段式弹性足和弹性轮辐结构,具有较高的松软路面通过性,但平顺性需要优化。 如果考虑月面低重力,松软月壤以及月球车速度,这种设计应能满足要求。但车轮的轮辐结构需要进一步优化,使其简单可靠。

图15 弹性轮结构设计Fig.15 Design of elastic wheel structure
5 小结
本文综述了月球车和火星车车轮的研究进展。 弹性轮凭借优异的减振性能,成为未来星球车车轮的发展趋势,中国高性能星球车车轮的研究应着眼于弹性轮新材料的开发以及弹性结构的优化。