基于图像识别的皮带运输机故障自动诊断方法
2022-06-27张闻中华守彤龚孜诣
陈 逸,张闻中,华守彤,龚孜诣
(华能国际电力股份有限公司 上海石洞口第二电厂,上海 201100)
0 引言
图像识别是指利用计算机程序对图像进行处理的应用技术,能够将目标图像中的对象节点全部识别出来。近年来,随着“物料无极运输”观念的普及,图像识别技术被广泛应用于机械损伤探查、机械故障诊断等多个领域之中。皮带运输机是一种常见的物料运输装置,通常以皮带作为介质,将工业物料运输至各个生产环节,在其应用过程中,极易表现出皮带跑偏等运行故障,为避免这类故障情况的发生,注意所安装元件的尺寸精度并对其进行定期维护与保养就显得极为重要[1]。然而由于运输距离长、磨损程度不可控等问题,极易使主机元件对于皮带运输机故障表现行为的诊断能力出现明显下降,这不但会造成主要机械设备的严重损伤,还会对主运输机元件的使用寿命造成影响。为避免上述情况的发生,以图像识别原理为基础,设计一种新型的皮带运输机故障自动诊断方法。
1 基于图像识别的故障信号特征提取
基于图像识别的故障信号特征提取包含目标图像预处理、皮带运输机振动机理分析、固有模态函数构建三个执行环节,具体操作流程如下。
1.1 目标图像预处理
目标图像预处理能够将待诊断图像中的节点信息引入到固有模态函数中,再根据识别节点的实时分布形式,定义皮带运输机故障信号特征的传输行为,从而判断所得计算阈值结果是否满足待识别图像的“分割熵”标准。所谓“分割熵”,也叫待识别图像的最大阈值结果,在对皮带运输机故障信号特征进行提取时,阈值结果的取值极限范围越大,就表示目标图像中所包含识别节点的数量越多;反之,若阈值结果的取值极限范围相对较小,则表示目标图像中所包含识别节点的数量也相对较少。
设A、B、C表示三个不相关的特征节点,iA、eA表示与节点A相关的目标图像分割值与模态熵值,iB、eB表示与节点B相关的目标图像分割值与模态熵值,iC、eC表示与节点C相关的目标图像分割值与模态熵值。联立上述物理量,可将皮带运输机故障信号特征的目标图像预处理表达式定义为:

假设在待识别图像中,皮带运输机故障信号特征节点所处位置不会发生变化,为准确分析机械设备元件的振动机理,则必须保证所选取识别节点不唯一。
1.2 皮带运输机的振动机理分析
皮带运输机故障行为的振动机理包含初始不平衡、新转子不平衡两种基本类型。其中,初始不平衡是指由机械制造与装配问题引起的运输机元件质心偏移的现象;新转子不平衡则是指在皮带运输机运行过程中,由机械设备腐蚀、磨损等原因引发的恒定转子损坏的现象。从振动传导特性的角度来看,皮带运输机初始不平衡故障、新转子不平衡故障的诱发原因虽然不同,但两者都能对皮带元件的正常振动行为造成影响[2]。对于皮带运输机元件而言,皮带振动强度对于机械设备转速的变化十分敏感,且机械设备转子的转速越快,皮带运输机故障行为所带来的振动表现也就越明显。设γ表示初始不平衡系数,r表示新转子不平衡系数,u1、u2表示两个不相关的皮带运输机故障信号振动特征值,表示系数u1与u2的物理平均值,β表示运输机元件的质心偏移向量。在上述物理量的支持下,联立式(1),可将皮带运输机故障行为的振动机理表达式定义为:

在初始不平衡、新转子不平衡故障行为同时发生时,由于二者表现行为具有明显的相位差,所以为保证故障诊断结果的绝对真实性,应对两种皮带运输机故障信号特征进行分别提取。
1.3 固有模态函数
固有模态函数决定了皮带运输机故障信号特征的表现形式。在图像识别原理的认知范畴中,皮带运输机故障信号特征会出现多种不同的表现形态,且在已知振动机理表达式条件的前提下,固有模态函数所涉及的故障信号特征数据量越大,主机元件对于故障表现行为的精准诊断能力也就越强[3]。为使固有模态函数能够完全符合皮带运输机故障行为的表现形式,在定义函数表达式时,应确定原变量φ的具体数值水平。规定α表示皮带运输机故障信号特征数据的实时存储参量,y(α)表示与参量α相关的纵向残差定标值,x(α)表示与参量α相关的横向残差定标值。联立上述物理量,可将原变量φ的计算表达式定义为:

在式(3)的基础上,设λ表示皮带运输机故障信号特征的模态赋值参量,且λ>1 的不等式条件恒成立,p˙表示基于图像识别原理所提取的故障信号特征参量值,ΔH表示单位时间内所能识别的皮带运输机故障信号特征数据总量。联立上述物理量,可将基于图像识别的皮带运输机故障信号特征固有模态函数表示为:

根据固有模态函数条件,对皮带运输机故障信号特征数据进行处理,再按照图像识别原则,完成对这些信息参量的按需提取。
2 皮带运输机故障的自动诊断
在图像识别原理的支持下,按照动力学模型构建、故障行为振动特性分析、时域同步诊断系数计算的处理流程,实现对皮带运输机故障行为的自动诊断。
2.1 动力学模型
皮带运输机作为一种重要的机械设备应用元件,在运输皮带与电动机、电动机与电量负载之间会形成完整的电信号闭合回路,且随着负载电阻数值的增大,各个回路内电信号参量的传输速率也会不断加快(模型结构如图1所示)[4]。当出现明显故障行为时,电动机元件的电量输出能力会受到影响,此时下级机械设备的运行能力会明显减弱,这也是导致皮带运输机设备实时电量负载水平并不能达到实际数值标准的主要原因。

图1 皮带运输机元件的动力学结构
设S表示皮带运输机设备内电量负载系数的初始赋值,a1、a2、…、an表示n个不同的电量信号传输特征值,n表示电量信号耦合负载最大值,m表示故障行为下的耦合电容,R表示皮带运输机元件的内阻数值。在上述物理量的支持下,联立式(4),可将皮带运输机故障行为的动力学模型表达式定义为:

已知皮带运输机元件内阻数值、故障行为的耦合电容数值始终保持不变,所以可将动力学模型看作一个半定值表达式,在对皮带运输机故障行为进行诊断时,应根据图像识别节点的分布形式,对电量负载系数实值进行配比。
2.2 故障行为的振动特性
在皮带运输机运行过程中,由于动力施压并不来源于同一方向,所以故障信号特征总是保持来回波动的传输形式,而独立波段内识别节点的排列状态,也就表现了故障行为的振动特性。在图像识别技术的认知中,皮带运输机故障行为的振动特性总是呈现阶段性往复的表现形式,即每一个独立波段内都包含一个故障信号特征的极大值和一个与之对应的极小值[5]。设zmax表示皮带运输机故障信号特征的极大值,zmin表示皮带运输机故障信号特征的极小值,在动力学向量恒为f的前提下,可将其计算表达式定义为:
式(6)中,表示皮带运输机故障信号特征的均值定义项。在式(6)的基础上,设σ1、σ2表示两个不同的振幅定义系数,ΔT表示故障行为波段的单位振动周期。联立上述物理量,可将皮带运输机故障行为的振动特性表达式定义为:

其中,ω1表示与σ1相关的故障行为图像识别定标值,ω2表示与σ2相关的故障行为图像识别定标值。若将振动特性看作是皮带运输机故障特征的必要表现形式,则可认为该项理论条件的取值结果会直接影响时域同步诊断指标的计算数值。
2.3 时域同步诊断系数
利用时域同步诊断系数对皮带运输机故障行为进行判别,需要确定脉冲信号与振动信号之间的数值配比关系,并以图像识别原理为基础,在确定指标参量实时映射权限的同时,实现对故障信号特征的按需排序与处理。针对时域同步诊断系数的计算,需要同时参考皮带运输机故障信号的脉冲信号特征与振动信号特征[6]。皮带运输机故障信号的脉冲信号特征可表示为,作为一项矢量参考条件,该项物理量的实际取值越大,时域同步诊断系数的计算数值也就越大。皮带运输机故障信号的振动信号特征可表示为,与脉冲信号特征不同,该项物理量的数值变化幅度相对较小,因此对于利用时域同步诊断系数而言,该项物理指标的影响作用能力也相对较弱。在上述物理量的支持下,联立式(7),可将时域同步诊断系数计算表达式定义为:

式(8)中,ξ表示基于图像识别的皮带运输机故障信号特征定标值,μ表示时域诊断权限,ϑ表示同步诊断权限,C表示基于图像识别的皮带运输机故障信号特征初始判别值。一般来说,时域同步诊断系数的取值越大,则表示皮带运输机故障行为被准确诊断出来的可能性也就越大。至此,实现对各项指标参量的计算与处理,在图像识别原理的作用下,完成对皮带运输机故障自动诊断方法的设计。
3 实例分析
利用Windows虚拟机模拟如图2所示的皮带运输机设备,在其传输皮带与周围隔板的连接处选取一节点作为故障行为节点,分别利用基于图像识别的诊断方法、基于改进堆叠降噪自动编码器的诊断方法对故障特征的表现行为进行检测,其中前者作为实验组、后者作为对照组。

图2 皮带运输机模拟图像
指标为故障行为节点处的训练精度值,ψ2指标为故障行为节点处的测试精度值。对于皮带运输机元件而言,对其故障表现行为的诊断准确性由ψ1、ψ2指标共同组成,具体计算表达式如下:

表1记录了实验组、对照组ψ2指标的具体数值。

表1 ψ2指标记录数值
表2记录了实验组、对照组ψ2指标的具体数值。
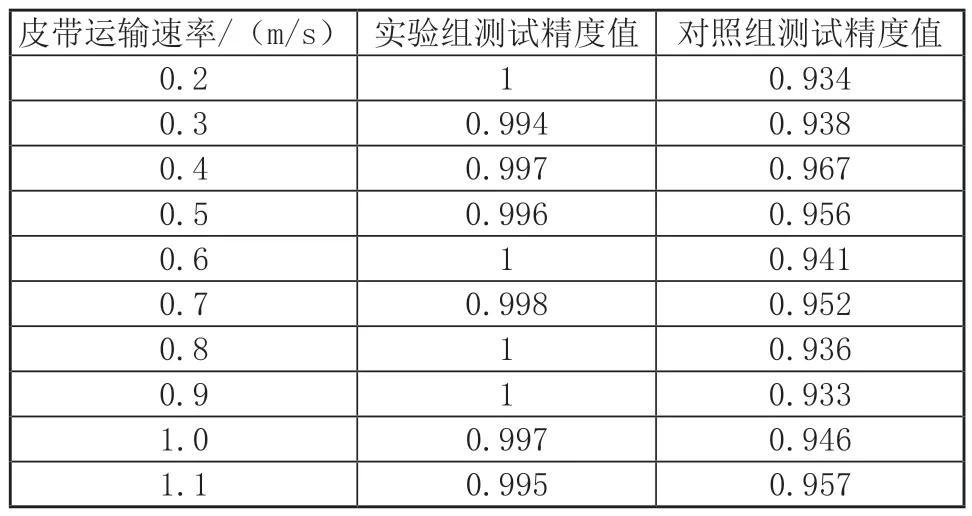
表2 ψ2指标记录数值
以表1、表2中的记录数据为依据,按照式(9)对皮带运输机故障表现行为的诊断准确度η进行计算。具体计算数值如表3所示。
实验组:当皮带运输速率等于0.7m/s、0.8m/s时,实验组诊断准确度(η指标)达到其最大取值结果99.8%;当皮带运输速率等于0.3m/s时,实验组诊断准确度(η指标)达到其最小取值结果98.8%,与其最大值相比,二者之间的差值仅能达到0.1%。
对照组:当皮带运输速率等于0.4m/s时,对照组诊断准确度(η指标)达到其最大取值结果94.3%;当皮带运输速率等于0.3m/s时,对照组诊断准确度(η指标)达到其最小取值结果89.4%,与其最大值相比,二者之间的差值达到了4.9%,高于实验组的极限数值差水平。

表3 η 指标计算数值
从平均值角度来看,整个实验过程中,实验组诊断准确度(η指标)的数值水平始终高于对照组。
综上可知,本次实验结论如下:
1)基于改进堆叠降噪自动编码器的诊断方法对于皮带运输机故障表现行为的诊断准确度可以达到90%;
2)基于图像识别的诊断方法对于皮带运输机故障表现行为诊断准确度的最大值超过了99%;
3)与基于改进堆叠降噪自动编码器相比,基于图像识别的诊断方法能够更加准确的对皮带运输机故障表现行为进行诊断,在最大化延长机械元件设备的寿命周期方面具有更强的实用性价值。
4 结语
在图像识别原理的作用下,新型皮带运输机故障自动诊断方法以固有模态函数作为切入点,根据动力学模型,对故障行为的振动特性进行统计,再联合时域同步诊断系数,判别已知的皮带运输机故障特征。与基于改进堆叠降噪自动编码器相比,这种新型诊断方法能够对皮带运输机故障表现行为进行更加准确地判别,能够稳定延长机械元件设备的寿命周期。
