直流供电下的永磁同步电机驱动系统母线电压振荡抑制策略
2022-06-25张珍睿刘彦呈杨鹏明郭昊昊梁晓玲
张珍睿 刘彦呈 杨鹏明 郭昊昊 梁晓玲
直流供电下的永磁同步电机驱动系统母线电压振荡抑制策略
张珍睿 刘彦呈 杨鹏明 郭昊昊 梁晓玲
(大连海事大学轮机工程学院 大连 116026)
针对直流推进系统中具有LC滤波器的永磁同步电机驱动系统的母线电压振荡问题,基于逆变器电压设计一种振荡抑制策略。该方法首先利用小信号分析法对电机和LC滤波器进行建模,从系统的阻抗匹配角度分析系统的稳定性。并将阻尼信号注入到脉宽调制的逆变器参考电压信号中,增加了电机的输入阻抗,避免了输入输出阻抗的相互影响,保证了系统的稳定性。同时,为了避免传统滤波器提取信号的相位偏差问题,将锁相环和低通滤波器相结合设计了一种信号提取结构。该结构提高了阻尼信号的提取精度,从而提升了逆变器电压补偿的阻尼补偿效果。最后通过仿真和硬件在环实验平台验证了该方法的有效性。
LC滤波器 稳定性 MiddleBrook准则 永磁同步电机(PMSM)
0 引言
近年来,随着蓄电池、锂电池等电池储能技术的不断发展,直流供电驱动系统被广泛地应用于航天、船舶、汽车等领域。该驱动系统具有结构简单、控制方便、响应迅速、发配电效率高等优势[1-3]。图1所示为该类直流供电驱动系统的一种典型的硬件拓扑结构。在该拓扑结构中,为了降低逆变器开关谐波对母线电压的影响,LC滤波器通常会被级联在逆变器的前端,用以维持直流电压的稳定和降低电流的谐波。逆变器后端则连接推进电机。而在各类电机中,永磁同步电机(Permanent Magnet Syn- chronous Motor, PMSM)具有结构简单、功率密度高、效率高、损耗小等优点[4-8],因此被广泛作为推进电机使用。

图1 系统示意图
高性能的推进电机变频器在恒负载转矩下会呈现恒功率负载特性[9-10],而这一特性会使系统稳定性随着电机功率的增大而变差[11-12]。具体表现为直流母线电压会出现较大的振荡现象[13]。通过增大母线电容可以抑制这种振荡,但是大容量电解电容会降低系统的可靠性和寿命[14],据统计,60%的驱动系统故障都是由于电解电容引起的[15],同时,电解电容体积大和质量大的缺点制约了系统往集成化方向发展[16]。近年来,为了进一步提升驱动控制系统的可靠性,容量大的电解电容逐渐被体积更小、寿命更长的低容值薄膜电容所取代,但电容的容值降低会进一步降低系统的阻尼,从而进一步破坏系统的稳定性[17]。因此,这种低容量电容的电机驱动系统的稳定性问题引起了学者们的广泛关注。
为了寻找直流母线的振荡机理和抑制方法,大量学者利用MiddleBrook稳定判据作为分析工具,从控制角度提出了一系列解决方法来提高直流供电逆变器-电机传动系统的稳定性[18-22]。针对具有LC输入滤波器的PMSM驱动系统,一种简单的直流母线电压稳定方法是通过小信号注入的方式来增大负载侧的输入阻抗[18-22]。文献[6, 18]设计了一个电阻补偿器,将直流母线电压的一部分小信号注入到电流控制回路中,以修改中频范围内的系统输入阻抗,从而对母线电压振荡进行阻尼。其中,文献[6]采用高通滤波器(High-Pass Filter, HPF)提取母线电压小信号,而文献[18]采用带通滤波器(Band Pass Filter, BPF)提取母线电压小信号。文献[19]推导了PMSM的输入阻抗模型,分析了未采用补偿器时的系统稳定性,并利用奈奎斯特稳定判据证明了补偿方法的有效性。但是这几种方法的控制信号都需要经过电流环,即设计参数时需要考虑电流环带宽的影响,当母线电压振荡频率过高或者电流环带宽较小时,会影响补偿效果。文献[20-21]改变了母线电压振荡信号的注入位置,采用带通滤波器提取母线电压振荡信号并将其注入到q轴参考电压中来克服电机负导纳引起的系统稳定性问题。该方法的缺点是电机起动时在q轴会注入一个较大的母线电压振荡信号,从而影响电机的起动性能。同时,当系统参数估算误差较大时,带通滤波器会造成较大的相位偏差,影响补偿效果。
本文根据MiddleBrook阻抗匹配准则,提出了一种新的系统阻尼补偿结构,通过修改逆变器的电压参考信号来提高负载侧的输入阻抗,该方法不受电流环带宽的影响,同时能够保证电机的动态性能。并且,逆变器参考电压补偿(Inverter Voltage Com- pensation, IVC)是一种动态补偿方法,补偿的阻尼与电机的转速相关,不仅能降低电机转速受母线电压扰动的影响,还能够提高电机的动态性能。同时为了保证提取信号的准确性,采用了锁相环(Phase Locked Loop, PLL)结合低通滤波器(Low-Pass Filter, LPF)的提取方法,利用锁相环相位超前和低通滤波器相位延迟互补的特点,在目标频率一定范围内提高提取精度。本文提出的方法很大程度上抑制了母线电压振荡,保证了系统的稳定性。仿真和实验证明了该方法的有效性。
1 LC滤波驱动系统稳定性分析
1.1 稳定判据
源侧-负载侧级联系统可由等效戴维南电路和等效控制框图表示,如图2所示。由图2可以判断驱动系统的闭环传递函数为
式中,s为拉普拉斯算子;Zo、Zin分别为源侧输出阻抗和负载侧输入阻抗。由式(1)可知,系统不稳定的根本原因是源侧输出阻抗Zo与负载侧输入阻抗Zin不匹配,即源侧与负载侧的阻抗比Zo/Zin违反了奈奎斯特稳定判据。目前,常用方法是设计匹配的系统阻抗。
为了分析PMSM驱动控制级联系统稳定性的因素。首先,对源侧的LC滤波器进行小信号建模,推导出源侧输出阻抗o;然后,对负载侧的双闭环控制下的永磁同步电机驱动系统进行小信号建模,根据逆变器的电压和电流、电机的电流和电压等关系推导出负载侧输入阻抗in;最后,根据输出阻抗o和输入阻抗in的伯德图和奈奎斯特曲线分析系统的稳定性。
1.2 LC滤波器的输出阻抗
由图1可知,根据基尔霍夫电压和电流定律可以列出源侧状态方程为
式中,dc、CPL分别为电感电流和恒功率负载电流;g、dc分别为电源电压和母线电压;、、dc、分别为输入电感、母线电容、线路电阻和时间。
假设电源电压g为常数,利用小信号的方法线性化式(2),可以得到LC滤波器的小信号模型为

1.3 PMSM驱动系统的输入阻抗
本文采用的电机为表贴式永磁同步电机(Surface Permanent Magnet Synchronous Motor, SPMSM),即d=q=s,则电机在dq坐标系下的电压方程为

式中,d、q分别为电机的d、q轴电压;d、q分别为电机的d、q轴电流;s、s、、分别为电机相电感、相电阻、极对数和永磁体磁链;为电机的机械角速度。
电机在dq坐标系下的运动方程为

逆变器输出电压受到PWM开关信号控制并激励电机产生电流,如果忽略逆变器的损耗,同时将逆变器模型建立在dq坐标系下,则电机的d、q轴电压与母线电压的关系可以表示[20]为

忽略逆变器的损耗,逆变器的输入功率dc和电机消耗的功率PMSM相等,因此,电机功率和逆变器输入功率的关系表达式为

速度控制器和电流控制器分别用s()和c()表示为
式中,sp、si分别为速度控制器的比例和积分增益;cp、ci分别为电流控制器的比例和积分增益。因此,q轴参考电流的表达式为
将式(5)~式(11)的数学模型利用小信号的方法进行分析。则逆变器的电压小信号表达式为

其中

式中,d、q、dc分别为电机d轴电压、q轴电压和母线电压的稳态值。
电机消耗功率与逆变器输入功率的小信号模型的表达式为

式中,CPL为恒功率负载电流的稳态值。
q轴电流控制器的小信号表达式为

电机运行稳定情况下,电流环设计时近似为典型一阶系统,稳态误差为零,因此电流环的输出值为定值。即



联立式(13)、式(14)、式(17),并令≈0,得到未补偿时PMSM驱动系统的输入阻抗in为

其中
1.4 LC滤波器驱动系统的稳定性分析
根据式(4)的源侧输出阻抗o和式(18)的负载侧输入阻抗in,在Bode图上表示出二者的关系,如图3a所示;在奈奎斯特曲线上表示出阻抗比o/in的关系,如图3b所示。
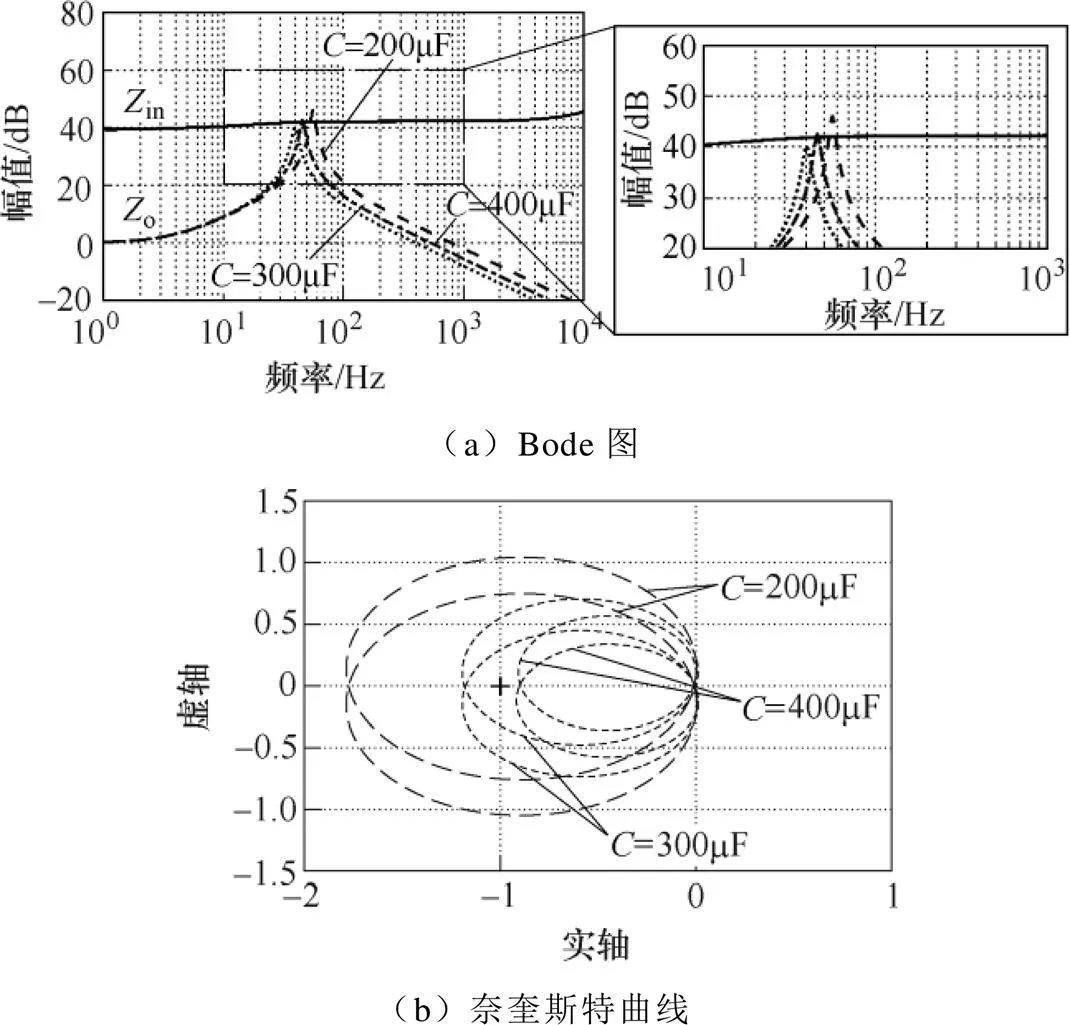
图3 Zo、Zin在不同母线电容C下的Bode图和奈奎斯特曲线
从图3a可以看出,具有LC滤波器的PMSM驱动系统的母线电容的容值会影响源侧输出阻抗的谐振幅值,当母线电容较小时,输入阻抗和输出阻抗将出现重合部分,使系统的输入输出阻抗不匹配,违反了MiddleBrook准则,进而导致系统失去稳定性。从图3b也可以看出,当母线电容较小时,阻抗比的奈奎斯特曲线包围了点(-1, 0),违反了奈奎斯特稳定判据,所以系统不稳定。因此,为了保证系统的稳定性,可以通过提高负载侧的输入阻抗来满足MiddleBrook准则。
2 基于逆变器参考电压的稳定补偿策略
基于对目前存在的补偿方法分析,为了既可以最大程度保证系统的稳定性,又可以降低补偿对电机的动态性能的影响,本文提出了一种IVC方法,系统控制框图如图4所示。本方法通过修改逆变器的参考电压ref来保证稳定性,避免了对电机控制环输出值的直接修改,从而降低了对电机转速或转矩的影响。

图4 系统控制框图
2.1 IVC补偿策略
通常情况下,逆变器的参考电压ref等于母线电压,并且可以用母线电压的大信号与小信号的和表示,有

本文为了提高逆变器-PMSM的输入阻抗,降低恒功率负载的负阻抗特性,修改后的逆变器的电压


联立式(13)、式(14)、式(23),并令≈0,可以推导出IVC方法补偿下的永磁同步电机驱动系

其中


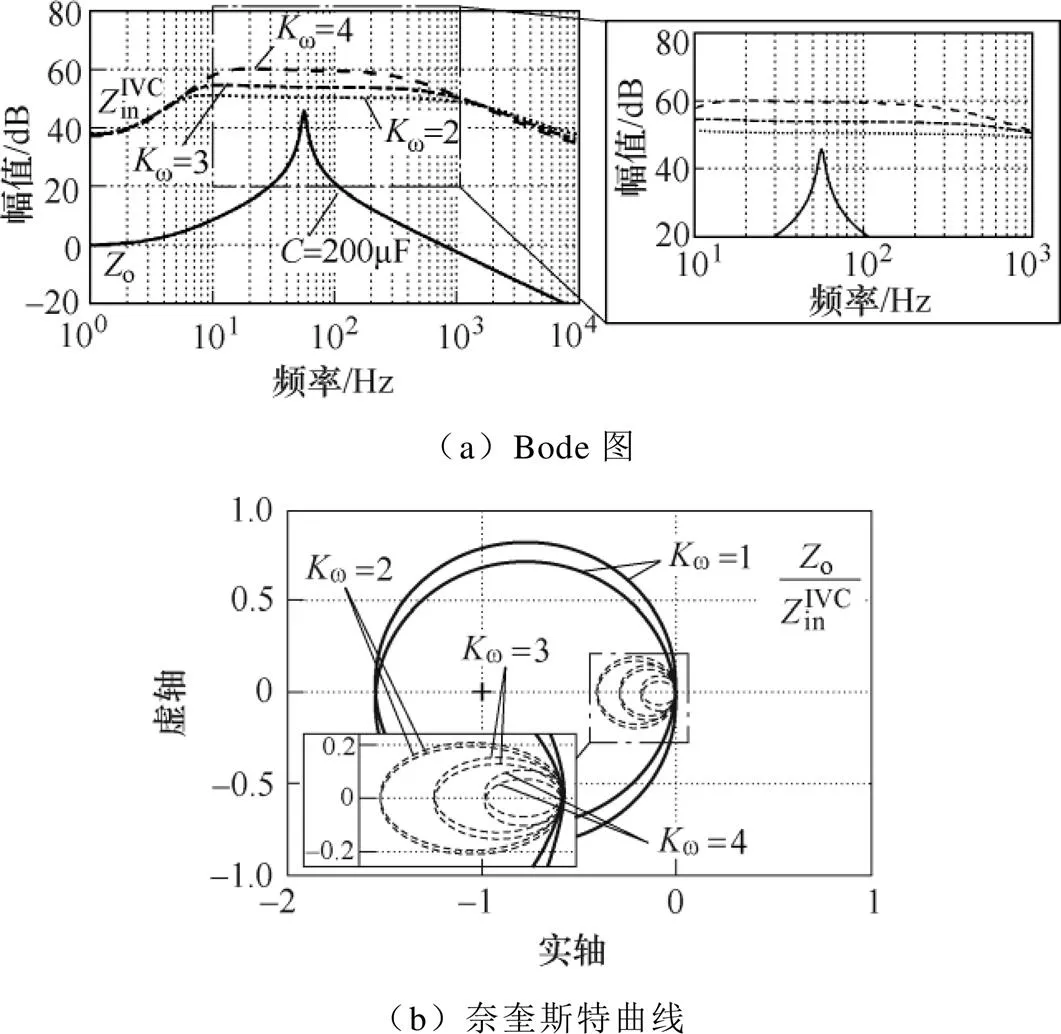
图5 采用IVC补偿时Zo、Zin在不同下的Bode图和奈奎斯特曲线

2.2 直流母线电压小信号的提取
逆变器参考电压的修改是由直流母线电压小信号电压决定的,因此,母线电压的小信号提取的准确性影响补偿的效果。参考文献中的提取环节一般采用高通滤波器、带通滤波器或者谐振控制器等实现。为了准确地抑制母线电压振荡,首先需要估算LC滤波器的振荡频率,然后确定提取环节的参数。
系统母线电压振荡的原因主要是由于负载侧功率增加,负阻抗特性增强,最后使得输入输出阻抗不匹配,因此确定系统的振荡频率首先需要确定负载侧的功率和电流的关系。系统负载侧的功率和逆变器电流的关系为

式中,CPL为负载功率。
将式(25)代入到式(2)中,得到整个系统小信号状态方程表达式为

上述状态方程的特征方程为


当电感L=40mH,电容C=200mF时,根据式(28),谐振频率可以估算为56.3Hz,则设计的带通滤波器提取环节就需要覆盖这个谐振频率。理论推导以及硬件参数通常会存在一定的误差。因此,采用带通滤波器的提取方式会引入一定的相位误差,本文提出采用锁相环和低通滤波器的提取方法,如图6所示。将锁相环的相位超前特性与低通滤波器的相位延迟特性相结合,实现小信号相位无差的提取,低通滤波器主要是为了消除高频谐波,保证系统稳定性。
图6中,为增益系数,可根据对系统的收敛速度的要求选取,但收敛速度越快,相位超前也越多。PI参数可根据系统频率设计,低通滤波器的截止频率根据系统的高频信号选择(本文选择为500Hz)。本方法可以在一定频率范围内提高信号的提取精度。
3 仿真和实验验证
为了验证上述结论的有效性,本文采用了仿真加硬件在环实验验证的策略,分别测试了IVC在电机起动、负载突加等多种状态下的母线电压以及电机控制情况。电机由埃斯顿自动化生产,LC滤波器、电机实验参数分别见表1、表2。
表1 LC滤波器实验参数

Tab.1 Experimental parameters of LC filter
表2 电机实验参数
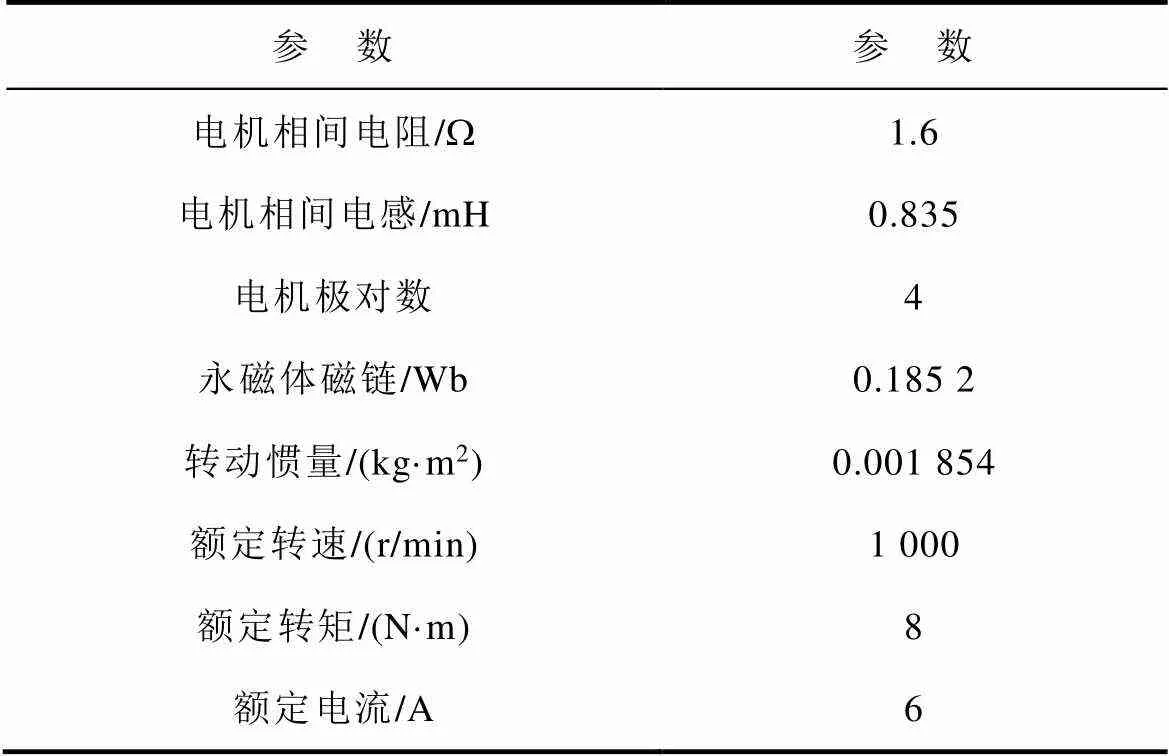
Tab.2 Experimental parameters of motor
3.1 仿真验证
根据图4搭建Matlab/Simulink仿真,采用IVC和未采用补偿策略时的系统表现如图7所示。电机起动过程中,与未补偿相比,IVC补偿后,母线电压的波动明显变小,由于此时未加负载,电机的功率很小,系统自身的阻尼能够使系统稳定。在0.7s加8N·m的转矩后,电机功率增大,未补偿的系统由于自身阻尼不足,导致母线出现幅值较大的低频振荡。同时,母线电压的低频振荡影响电机的运行性能,导致电机转速出现小幅度的振荡。补偿后系统的母线电压和电机转速出现一个短暂的调节过程,从图7中可以看出,0.9s后母线电压和电机转速达到稳态,调整过程结束后,系统保持稳定。同时,受母线电压振荡的影响,电机转速在调节过程中会产生小幅度的波动,但是当母线电压稳定后,波动消失。
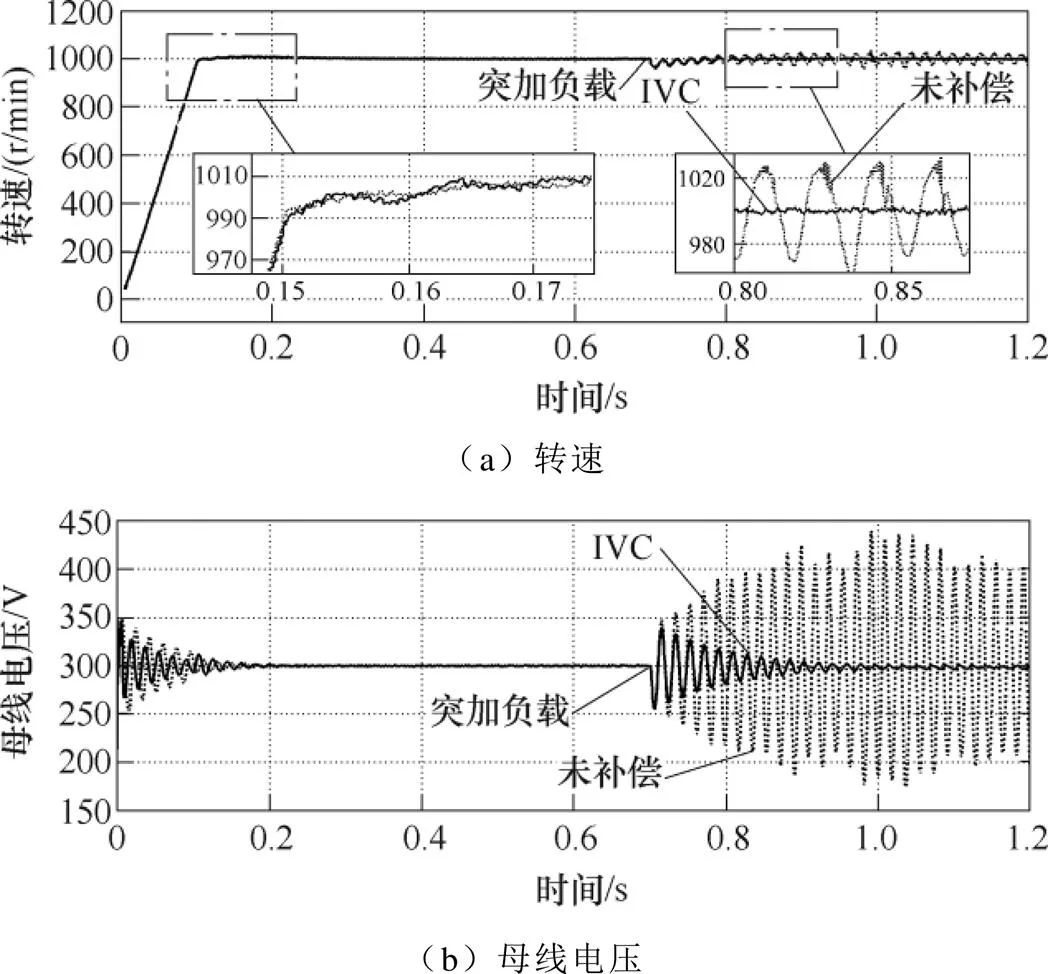
图7 采用IVC和未采用补偿策略时的系统表现
3.2 实验验证
为了进一步验证该方法的实际应用,考虑到控制系统复杂,本文采用硬件在环(Hardware in Loop, HIL)测试系统,采用上海远宽能源科技有限公司开发的高性能HIL产品(型号为:NI PXIE-1071),如图8所示。该产品被广泛应用于光伏发电、风力发电、电机控制等电力和新能源行业[23]。

图8 HIL测试平台
该系统通过计算性能强的处理器对电机、逆变器、增量式光电编码器、电感电容等基础元器件进行实时模拟,将实时的计算输出通过专用数据传输通道传送到示波器。
在建立硬件在环实时验证系统之后,首先对电机的起动性能和控制算法的稳定效果进行验证。IVC补偿实验结果如图9所示。在图9a中,设置电机起动转矩为8N·m,转速为500r/min,IVC保持投入状态。从图中可以看出,电机转速的响应速度较快,母线电压振荡也维持在一个较小的范围内,并且在转速稳定后母线电压迅速稳定。图9b和图9c为IVC投入前后不同提取方法的实验结果,图中表示的是在转速为1 000r/min和转矩为8N·m时的实验结果。图9b采用BPF对电机母线电压进行提取,而图9c采用的是PLL+LPF的提取方法,两种方法选取相同补偿增益系数。当IVC未投入时,母线电压出现了较大的振荡,IVC投入后,母线电压渐渐稳定。采用PLL+LPF提取方式的系统收敛速度(80ms)要大于BPF的收敛速度(240ms)。本文提出的PLL+LPF的方法能够提高阻尼信号的提取准确度,使系统能够更快速地稳定。
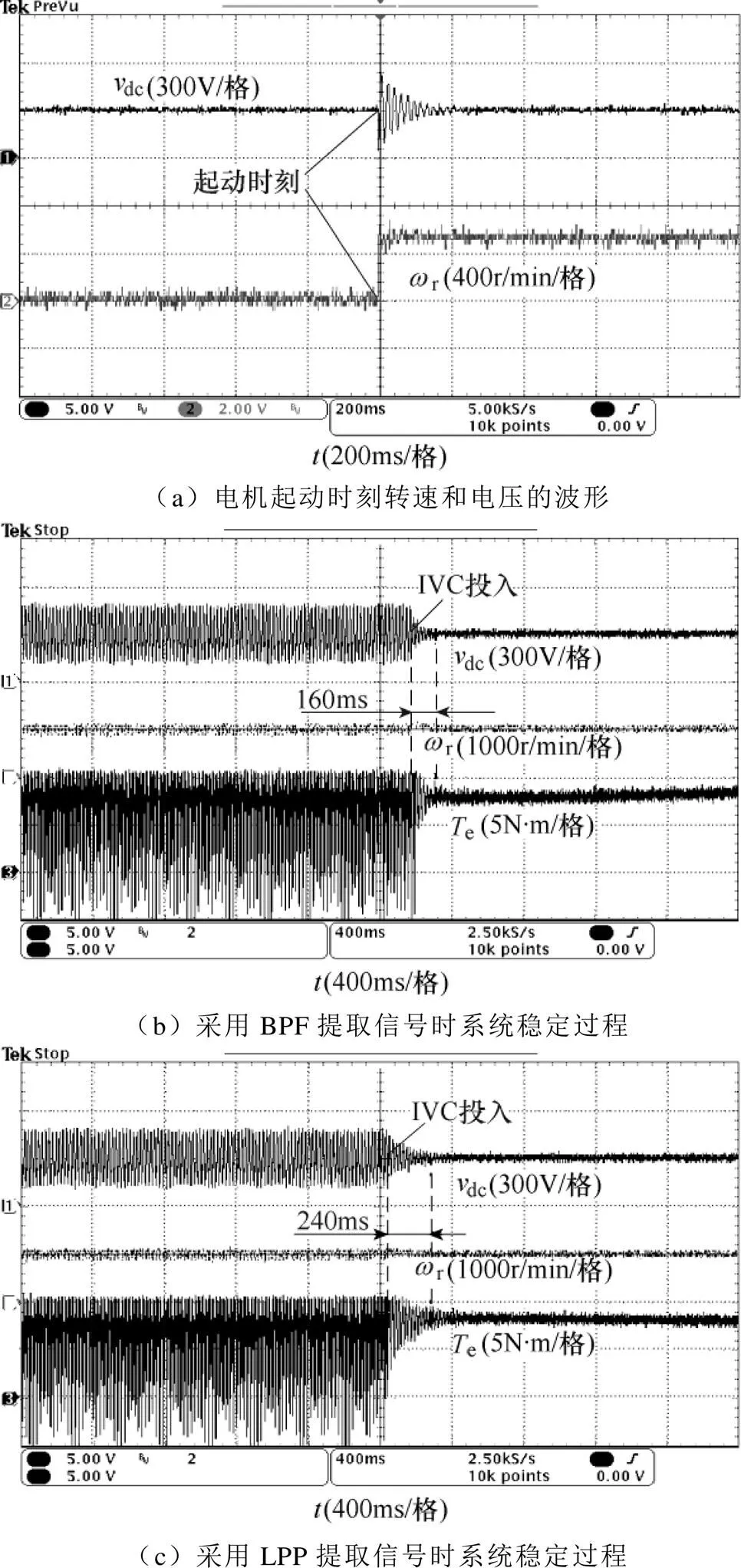
图9 IVC补偿实验结果
传统的参考电压所补偿的阻尼是与母线电压稳态值相关的[20],而IVC所补偿的阻尼是与电机的q轴电压相关的,见式(23),IVC能够在不同的转速下提供不同的补偿阻尼。因此,在低转速时IVC能够降低母线电压扰动对电机的影响。下面从两组实验对这一结论进行验证。


图10 参考电压补偿策略与IVC的对比结果
图10c和图10d为突加转速的动态过程实验结果。在这一过程中,转矩参考值为8N·m,转速参考值从500r/min突变到600r/min。在这一过程中,母线电压出现了相同的波动,并经过很短的调节过程后趋于稳定。从图中可以看出,IVC补偿的电机转速(见图10d)具有更低的超调和调节时间。因此,相比于已有的参考电压补偿策略而言,IVC补偿的驱动系统具有更低的母线电压敏感度和更好的动态性能。
4 结论
在具有LC滤波器的PMSM驱动系统中,恒功率负载的负阻抗特性会给系统稳定运行带来不利影响。本文以永磁同步电机为控制对象,分析了系统振荡机理,提出了基于逆变器参考电压的稳定补偿策略,得到以下结论:
1)当母线电容容值较低且负载功率较大时,系统源侧输出阻抗与负载侧输入阻抗不匹配,从而违反MiddleBrook稳定判据或者奈奎斯特稳定判据,最终导致系统失稳。
2)锁相环和低通滤波器这一信号提取结构能够准确地提取母线电压的振荡信号,并且在一定带宽内降低相位误差,保证补偿的准确性。
3)本文所提出的稳定补偿策略增大了负载侧的输入阻抗,符合阻抗匹配的稳定要求,能够有效地抑制母线电压振荡,保证系统的稳定性。
4)与现有的参考电压补偿方法相比,IVC补偿策略具有更低的母线电压敏感度和更优的动态性能。
[1] 马伟明. 电力电子在舰船电力系统中的典型应用[J]. 电工技术学报, 2011, 26(5): 1-7.
Ma Weiming. Typical applications of power elec- tronics in naval ship power systems[J]. Transactions of China Electrotechnical Society,2011, 26(5): 1-7.
[2] 夏梦雷, 张德磊, 陈峰雷, 等. 新型车载电源系统的优化设计[J]. 电气技术, 2020, 21(10): 50-53.
Xia Menglei, Zhang Delei, Chen Fenglei, et al. Optimization design of new vehicle power system[J]. Electrical Engineering, 2020, 21(10): 50-53.
[3] 汤茂东, 曲小慧, 姚若玉, 等. 基于离散一致性算法的直流配电网多光伏协调控制策略[J]. 电力系统自动化, 2020, 44(24): 89-95.
Tang Maodong, Qu Xiaohui, Yao Ruoyu, et al. Multi-photovoltaic coordinated control strategy in DC distribution network based on discrete consensus algorithm[J]. Automation of Electric Power Systems, 2020, 44(24): 89-95.
[4] 于安博, 刘利, 阚志忠, 等. 高频脉振信号注入永磁同步电机无滤波器初始位置辨识方法[J]. 电工技术学报, 2021, 36(4): 801-809.
Yu Anbo, Liu Li, Kan Zhizhong, et al. Initial position identification of PMSM with filterless high frequency pulse signal injection method[J]. Automation of Electric Power Systems, 2021, 36(4): 801-809.
[5] 郭科宇, 李耀华, 史黎明, 等. 电枢分段供电永磁直线同步电机的非线性数学模型[J]. 电工技术学报, 2021, 36(6): 1126-1137.
Guo Keyu, Li Yaohua, Shi Liming, et al. Non-linear mathematic model of a segmented powered permanent magnet linear synchronous machine[J]. Transactions of China Electrotechnical Society, 2021, 36(6): 1126- 1137.
[6] 蒋钱, 卢琴芬, 李焱鑫. 双三相永磁直线同步电机的推力波动及抑制[J]. 电工技术学报, 2021, 36(5): 883-892.
Jiang Qian, Lu Qinfen, Li Yanxin. Thrust ripple and depression method of dual three-phase permanent magnet linear synchronous motors[J]. Transactions of China Electrotechnical Society, 2021, 36(5): 883-892.
[7] 王明杰, 贾宛英, 张志艳, 等. 永磁直线同步电机空载反电动势和推力的解析计算[J]. 电工技术学报, 2021, 36(5): 954-963.
Wang Mingjie, Jia Wanying, Zhang Zhiyan, et al. Analytical calculation of no-load eletromotive force and thrust in permanent magnet linear synchronous motors[J]. Transactions of China Electrotechnical Society, 2021, 36(5): 954-963.
[8] 陈卓易, 屈稳太. 基于PID型代价函数的永磁同步电机模型预测电流控制[J]. 电工技术学报, 2021, 36(14): 2971-2978.
Chen Zhuoyi, Qu Wentai. Model predictive current control for permanent magnet synchronous motors based on PID-type cost function[J]. Transactions of China Electrotechnical Society, 2021, 36(14): 2971-2978.
[9] Wu Mingfei, Lu D. Active stabilization methods of electric power systems with constant power loads: a review[J]. Journal of Modern Power Systems and Clean Energy, 2014, 2(3): 233-243.
[10] Pietilainen K, Harnefors L, Petersson A, et al. DC-link stabilization and voltage sag ride-through of inverter drives[J]. IEEE Transactions on Industrial Electronics, 2006, 53(4): 1261-1268.
[11] 王建华, 张方华, 龚春英, 等. 带恒功率负载的DC/DC变换器起动过程分析[J]. 电工技术学报, 2009, 24(4): 121-125.
Wang Jianhua, Zhang Fanghua, Gong Chunying, et al. Start-up process analysis of DC/DC converter with constant power load[J]. Transactions of China Elec- trotechnical Society, 2009, 24(4): 121-125.
[12] Rivetta C, Emadi A, Williamson G, et al. Analysis and control of a Buck DC-DC converter operating with constant power load in sea and undersea vehicles[J]. IEEE Transactions on Industry Appli- cations, 2006, 42(2): 559-572.
[13] 滕昌鹏, 王玉斌, 周博恺, 等. 含恒功率负载的直流微网大信号稳定性分析[J]. 电工技术学报, 2019, 34(5): 973-982.
Teng Changpeng, Wang Yubin, Zhou Bokai, et al. Large-signal stability analysis of DC microgrid with constant power loads[J]. Transactions of China Electrotechnical Society, 2019, 34(5): 973-982.
[14] 庄绪州, 张勤进, 刘彦呈, 等. 船舶全电力推进系统恒功率负载有源阻尼控制策略[J]. 电工技术学报, 2020, 35(增刊1): 101-109.
Zhuang Xuzhou, Zhang Qinjin, Liu Yancheng, et al. An active damping control of constant power load for all-electric ships[J]. Transactions of China Electro- technical Society, 2020, 35(S1): 101-109.
[15] 赵楠楠. 空调永磁压缩机无电解电容驱动控制技术研究[D]. 哈尔滨: 哈尔滨工业大学, 2019.
[16] 罗慧, 陈威龙, 尹泉. 无电解电容永磁同步电机驱动系统控制策略综述[J]. 电气传动, 2019, 49(4): 11-18.
Luo Hui, Chen Weilong, Yin Quan. Control strategy overview of permanent magnet synchronous motor drive system without electrolytic capacitor[J]. Elec- tric Drive, 2019, 49(4): 11-18.
[17] Wang Dong, Lu Kaiyuan, Rasmussen P, et al. Voltage modulation using virtual positive impedance concept for active damping of small DC-link drive system[J]. IEEE Transactions on Power Electronics, 2018, 33(12): 10611-10621.
[18] 方晓春, 钟志宏, 杨中平, 等. 阻抗不匹配引起的逆变器-IPMSM系统直流侧振荡抑制方法对比[J]. 电工技术学报, 2017, 32(15): 50-58.
Fang Xiaochun, Zhong Zhihong, Yang Zhongping, et al. Comparative research on DC side oscillation suppression methods for inverter IPMSM system caused by impedance mismatch[J]. Transactions of China Electrotechnical Society, 2017, 32(15): 50-58.
[19] Liutanakul P, Awan A, Pierfederici S, et al. Linear stabilization of a DC bus supplying a constant power load: a general design approach[J]. IEEE Transactions on Power Electronics, 2009, 25(2): 475-488.
[20] Mohamed Y, Radwan A, Lee T. Decoupled reference- voltage-based active DC-link stabilization for PMSM drives with tight-speed regulation[J]. IEEE Transa- ctions on Industrial Electronics, 2012, 59(12): 4523- 4536.
[21] Song Xinda, Zheng Shiqiang, Han Bangcheng, et al. Active damping stabilization for high-speed BLDCM drive system based on band-pass filter[J]. IEEE Transa- ctions on Power Electronics, 2017, 32(7): 5438-5449.
[22] Feng Fan, Zhang Xin, Lin Fanfan, et al. Impedance modeling and stability analysis of dual active bridge converter with LC input filter[J]. CES Transactions on Electrical Machines and Systems, 2018, 2(3): 4907- 4914.
[23] 孙鹏琨, 葛琼璇, 王晓新, 等. 基于硬件在环实时仿真平台的高速磁悬浮列车牵引控制策略[J]. 电工技术学报, 2020, 35(16): 3426-3435.
Sun Pengkun, Ge Qiongxuan, Wang Xiaoxin, et al. Traction control strategy of high-speed maglev train based on hardware-in-the-loop real-time simulation platform[J]. Transactions of China Electrotechnical Society, 2020, 35(16): 3426-3435.
Suppression Strategy of Bus Voltage Oscillation for PMSM in DC Power Supply Drive System
(Marine Engineering College Dalian Maritime Unverisity Dalian 116026 China)
Aiming at the problem of bus voltage oscillation in permanent magnet synchronous drive motor system with LC filter in DC drive system, this paper designed an oscillation suppression strategy based on inverter voltage. Firstly, the small-signal analysis method was used to model the motor and LC filter, and the stability of the system was analyzed from the point of view of the system's impedance match. The damping signal was injected into the inverter reference voltage of pulse width modulation, which increases the input impedance of the motor, avoids the mutual influence of the input and output impedances, and keeps the system stable. Simultaneously, in order to avoid the phase deviation of signal extracted by the traditional filter, a signal extraction structure was designed by combining phase locked loop and low pass filter. This structure improves the extraction precision of damping signal, and thereby improving the damping compensation effect of the inverter voltage compensation. Finally, simulation and hardware in the loop experimental platform verified the effectiveness of this method.
LC filter, stability, MiddleBrook criterion, permanent magnet synchronous motor (PMSM)
10.19595/j.cnki.1000-6753.tces.201482
TM341
国家自然科学基金(51979021, 51709028)、大连海事大学优秀博士学位论文培育项目(2022YBPY003)、中央高校基本科研业务费专项资金(3132019317)、辽宁省重点研发计划(2017220005)和辽宁省自然科学基金指导计划(20170540082)资助项目。
2020-11-06
2021-05-10
张珍睿 男,1994年生,博士研究生,研究方向为永磁同步推进电机驱动控制、无位置传感器和模型预测控制技术。E-mail: tabz00@qq.com
郭昊昊 男,1984年生,讲师,博士生导师,研究方向为交流电机控制、电力电子变换器、船舶电力推进技术。E-mail: ghh1984@dlmu.edu.cn(通信作者)
(编辑 崔文静)