基于空时处理的水声扩频通信
2022-06-25张文博张宝胜聂东虎
周 锋 张文博 张宝胜 聂东虎 王 洋 刘 兵
(哈尔滨工程大学水声技术重点实验室 哈尔滨 150001)
(海洋信息获取与安全工信部重点实验室(哈尔滨工程大学) 哈尔滨 150001)
(哈尔滨工程大学水声工程学院 哈尔滨 150001)
1 引言
水声通信(Underwater Acoustic Communication, UWA)是海洋信息传输的一种重要方式,在海洋信息学领域占有重要地位。水声通信信道具有严重的相干多径干扰和噪声,这使得UWA通信比其他无线电通信更加困难[1,2]。扩频通信技术由于具有较强的抗干扰能力,能有效抵抗多径干扰和噪声,保证信息传输的高可靠性。因此,选择扩频技术来调制UWA通信中的UWA信号[3-5]。
从射线声学的角度来看,UWA信号从声源发射,并沿不同路径的声线到达接收器[6],因此,由于UWA信道的多径干扰,接收信号具有典型的时空特性。合理利用接收信号的这一特性可以有效利用多径信道的结构,提高接收机的检测性能。
本文提出了一种基于空时簇处理的UWA扩频通信方案。发射信号通过扩频技术进行调制。为了利用UWA信号的时空特性,本文使用水听器的垂直线阵列(Vertical Line Array, VLA)接收信号,设计了一个空时处理器来提取和利用接收端的这些空时簇。这种接收方案可以有效地提高通信系统的可靠性。仿真和实验证明,该通信方案在干扰严重的海洋环境中仍然具有良好的鲁棒性。
2 信道与系统模型
一般来说,UWA信道是时变和空变随机信道。总接收信号是接收器处所有声线传输的信号的相干叠加。由于不同声线的影响,接收信号表现出明显的时空特征[7]。通常,我们忽略介质吸收的频率特性,并假设沿任何路径都没有色散。假设存在L条路径,且沿每个单独传播路径的声信号波形保持不变。因此,UWA信道的脉冲响应为

通信系统的位置如图1所示,接收机使用VLA来接收UWA信号。假设VLA位于远场,所以UWA信号入射到VLA的是平行平面波。

图1 多路径信号模型和系统布局图
通信系统的流程图如图2所示。在发射端,首先采用二进制相移键控(Binary Phase Shift Keying,BPSK)对信号进行调制,然后对BPSK信号进行脉冲整形滤波,以减少符号间干扰,这里采用可用于接收机的平方根升余弦滤波器。然后,采用传统的直接序列扩频(Direct Sequence Spread Spectrum,DSSS)、M元扩频、循环移位键控(Cyclic Shift Keying, CSK)或M元循环移位键控(M-ary Cyclic Shift Key, MCSK)对形成的基带信号进行扩频调制[8-10]。载波调制将信号的频谱移到高频,然后将信号发送到UWA信道。

图2 基于空时处理的水声扩频通信系统框图
在接收器处,由VLA接收的信号首先由带通滤波器滤波,以便获得载波频带的信号,有效地滤除其他频段的噪声。然后将这些信号发送到空时处理器,利用水声信号的空时分簇特性,得到各个方向的多径信号。根据最大比合并准则,这些方向信号的合并可以有效地提高接收信噪比(Signal-to-Noise Ratio, SNR),能更准确地恢复原始信息[11]。
3 传输信号模型
在该系统中,由扩频信号传输的二进制原始信息。系统传输信息的信号表示为

4 空时处理器
接收机的空时处理器框图如图3所示。当接收到的信号被发送到空时处理器时,先估计所有多径的DOA,通过在这些DOA方向形成波束以获得各个方向上的多径信号。使用匹配追踪算法估计各个DOA方向上的多径信号时延,得到多个以DOA方向分组的具有信息的时空簇。

图3 空时处理器的框图
4.1 DOA估计
在该系统中,检测信号为线性调频信号,信息信号为扩频信号,都是典型的宽带信号。VLA接收的信号是多径信号的相干叠加。在空时处理器中应选择适合相干宽带信号的DOA估计算法。


4.2 波束形成
波束形成技术是指对每个阵元的输出进行加权求和,让阵列的输出信号可以使同一方向入射的信号通向叠加[17]。然后,阵列将在该方向产生主波束,并在其他方向产生较小的响应。对于线性阵列,选取第1个阵元的相位作为参考相位,将各阵元的相位调整到参考相位。
在VLA接收信号下,m阵元的时延为
采样分数时延滤波器能获得采样间隔的分数时延,从而精确地实现阵列每个阵元接收到的期望方向信号的同相叠加。令

5 系统性能分析
通过仿真验证了本文所提出的通信系统的性能,仿真参数如表1所示。

表1 仿真参数

当信噪比为-15 dB时,通过DOA估计获得的空间谱如图4所示。可以看出,第4节提出的方法能够在负信噪比条件下准确估计多径信号的DOA。

图4 DOA估计出的仿真信道对应的空间谱图
在空时处理器之后,估计的空时分布图如图5所示,显示了接收到的UWA信号的空时簇特性。如果信道在信号传输过程中是线性时不变的,则可以得到多径信号的时空簇。图5表明,在每个DOA中有两个多径,因此我们可以在每个DOA中使用Rake接收机。即采用空时2维Rake接收机对UWA信号进行处理,可以有效提高通信系统的正确传输概率。
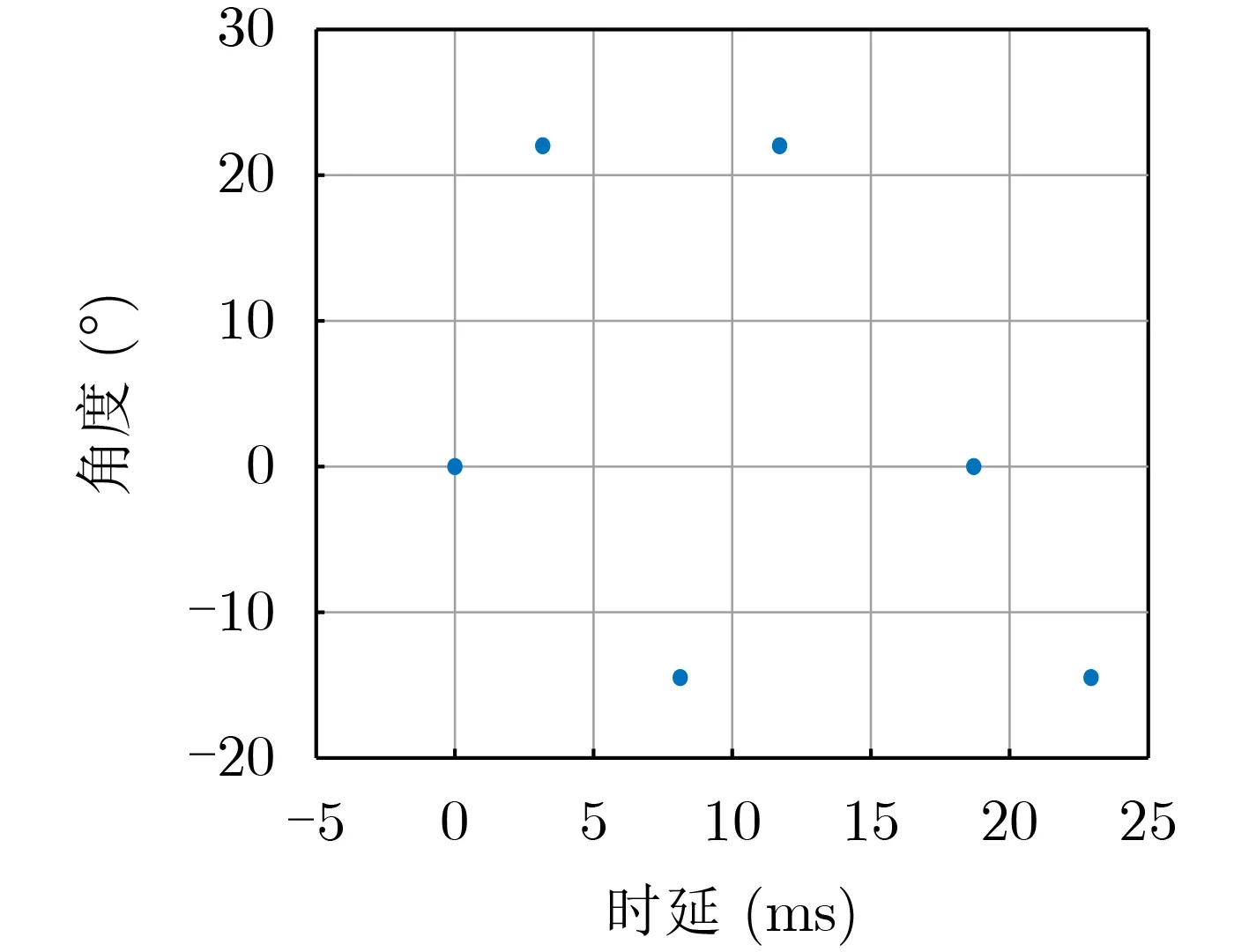
图5 多径信号的时空分布
首先,利用直接序列扩频调制信息信号,并假设信噪比为-12 dB。如果发送的信息量是300 bit,则在图6展示了不同接收模式下的星座图。从星座图的对比分析可以看出,当信号由单个阵元接收时,星座图是模糊的,当信噪比为-12 dB时,星座图是无法直接解码的。Rake接收机接收到信号后,星座图得到改善。在接收到VLA信号后,能很容易地识别星座。如果采用空时2维Rake接收机对接收到的信号进行处理,可以清晰地识别星座,有利于接收机的正确判决。对接收信号进行空时2维联合处理可以同时获得时间增益和空间增益。
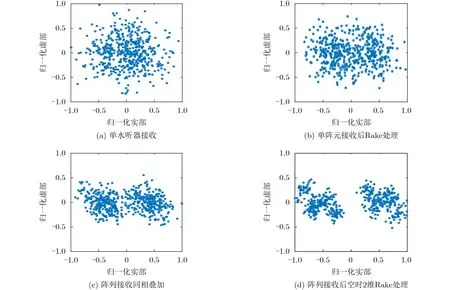
图6 不同接收模式下的星座图

表2 仿真模拟的多径信道参数
为了模拟真实的UWA多径信号,本文利用Bellhop射线追踪程序模拟海洋环境。假设海洋深度为2000 m,海洋中的声速是均匀的,即1500 m/s,距离海面最近的VLA的发射器和阵列元件均位于500 m深度处。VLA中的阵元数为12,相邻阵元之间的距离为0.25 m。接收器和发射器之间的水平距离为3.5 km。到达每个阵列阵元的信号路径可以视为相同。在每个阵元处测得的信道冲激响应只有微小的差异,这导致每个阵元接收到的信号有很小的延时和振幅衰减差异。以离海面最近的阵元为例,bellhop产生的多径信道参数信息如表3所示。
当信噪比为-15 dB时,通过DOA估计获得的空间谱如图7所示。可以看出,在估计的空间谱中有两个明显的谱峰,对应表3的多径角度;当SNR低至-15 dB时,仍然可以估计多径信号的方向。
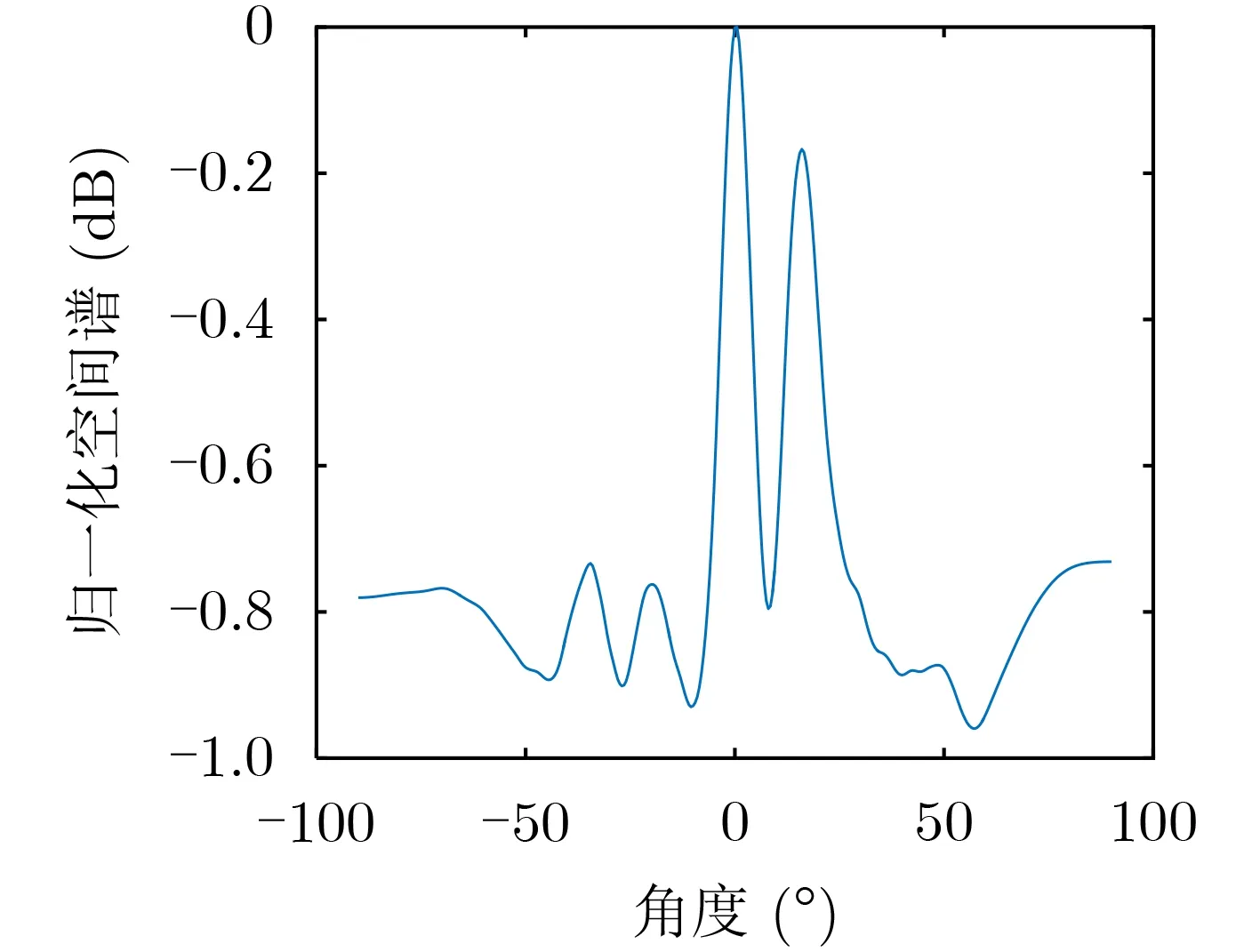
图7 通过DOA估计获得的空间谱

表3 多径信道参数
当信噪比范围为-15~-10 dB时,DSSS通信系统在3种接收模式下的误码率曲线如图8所示。当信噪比为-15 dB时,对接收信号进行空时处理仍能使误码率保持在较低水平,则直扩通信系统工作正常。
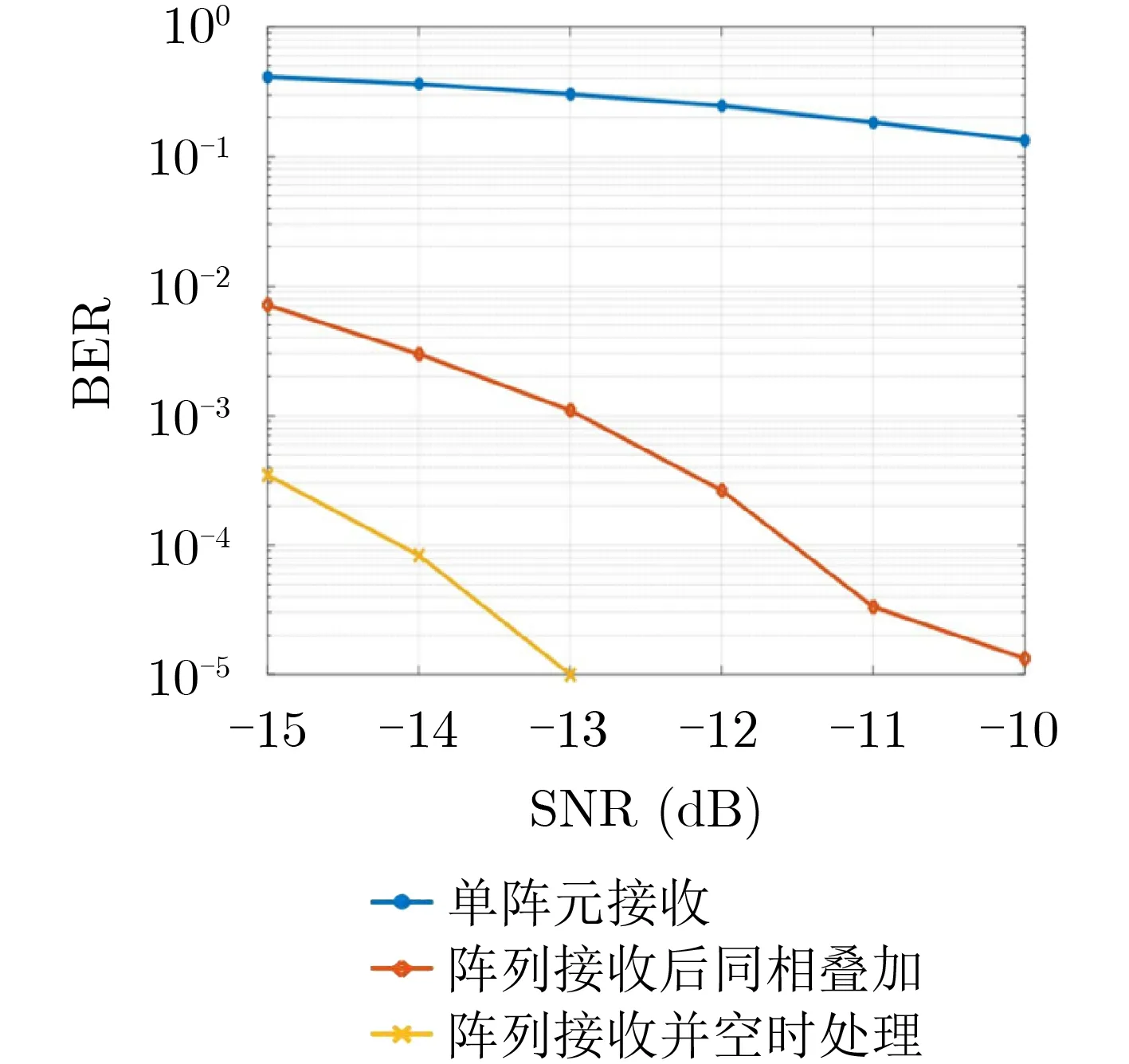
图8 误码率曲线的比较
但当信号由单个阵列单元接收时,在相同信噪比下误码率约为0.5,不能正确解码,是3种接收模式中性能最差的。这表明,对接收信号进行空时处理可以降低对通信系统信噪比的要求,使其在高噪声条件下保持鲁棒性。
我们对基于空时处理的UWA扩频通信系统的扩频调制方式进行了改进,比较了扩频通信在DSSS、M元、CSK和M-CSK下的性能,获得的BER曲线如图9所示。可以看出,DSSS调制下的系统具有最好的抗误码性能。因为直接序列扩频系统只使用1个扩频序列,并且扩频序列在接收机处不受互相关干扰。虽然在其他3种调制方式下通信系统的误码率都有所升高,但系统的通信速率高于直接序列扩频调制。事实上,UWA通信对信噪比和通信速率的要求可以通过选择合适的扩频调制来调制发射信号。

图9 利用多径信号时空分布的通信方法误码率性能比较
为了验证所提出的UWA通信算法的有效性,于2020年12月在哈尔滨工程大学水声实验室进行了水池实验。实验选择的信道池存在一定的多径干扰。那天晚上没有其他人进行实验,所以环境相对安静。一台个人计算机与功率放大器和发射换能器相连,传输信息信号。使用VLA来接收信号。线阵的阵元数为8,相邻阵元之间的距离均匀为0.18 m。取离水面最近的有效阵元作为参考阵元,序号设为1。发射传感器放置在2 m的深度,VLA的中心位于相同的深度。发射传感器和VLA之间的水平距离为5 m。
发送的信号如图10所示。携带信息信号前的第1个LFM信号用于时间同步,第2个LFM信号用于信道估计或接收信号的DOA估计,后续说明信息信号时将省略对前端LFM信号的提及。

图10 信号帧结构示意图
实验中的采样频率设置为50 kHz。发射信号均为宽带信号,频带为3~5 kHz。可以计算出VLA位于发射换能器的远场,接收到的UWA信号可以看作平行平面波。实验中传输了MCSK调制的信号,信息量为900 bit,扩频码周期为15。
以第8个阵元为例,通过匹配追踪算法计算的UWA信道单位脉冲响应如图11所示。可以看出,信道中存在一定的多径干扰,多径的存在会引起接收信号波形的一定失真和延迟。
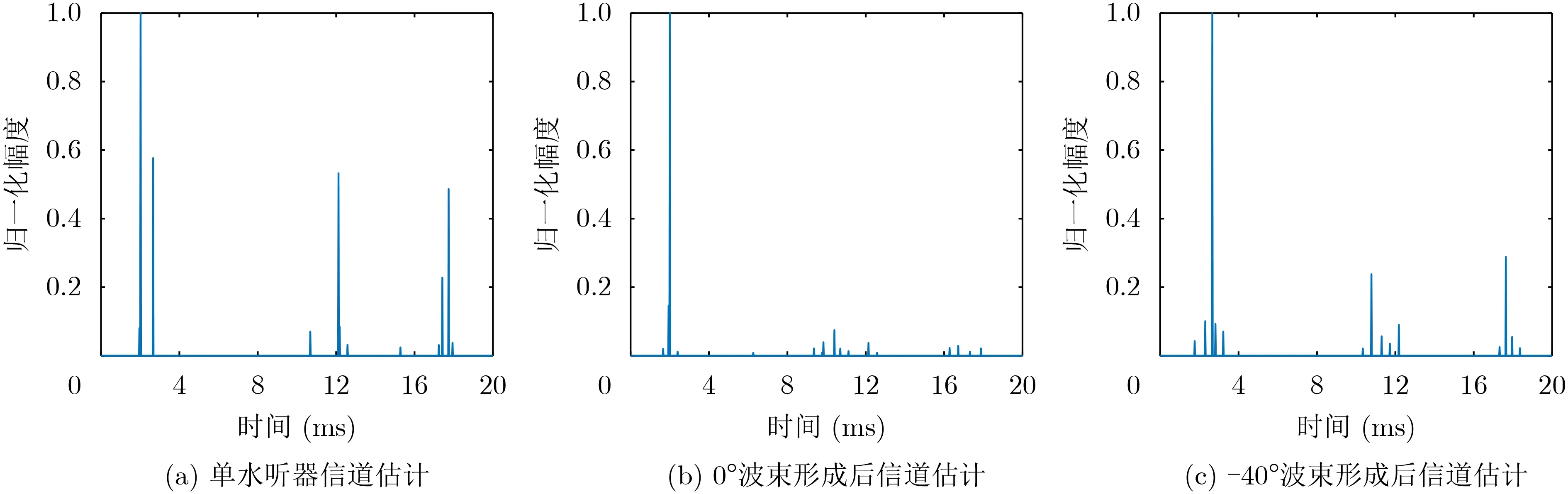
图11 UWA信道的脉冲响应
为了比较水声扩频通信系统在不同接收模式下的性能,我们在发送信号中加入一定量的噪声,信噪比为-10 dB。在数据处理过程中,提出的DOA估计方法用于估计接收信号的空间谱。获得的空间频谱如图12所示。可以看出,在空间谱中存在两个明显的谱峰,这表明只能估计多径信号的两个入射角。在波束形成后,两个峰值角的相对时间时延约为0 ms和0.64 ms。
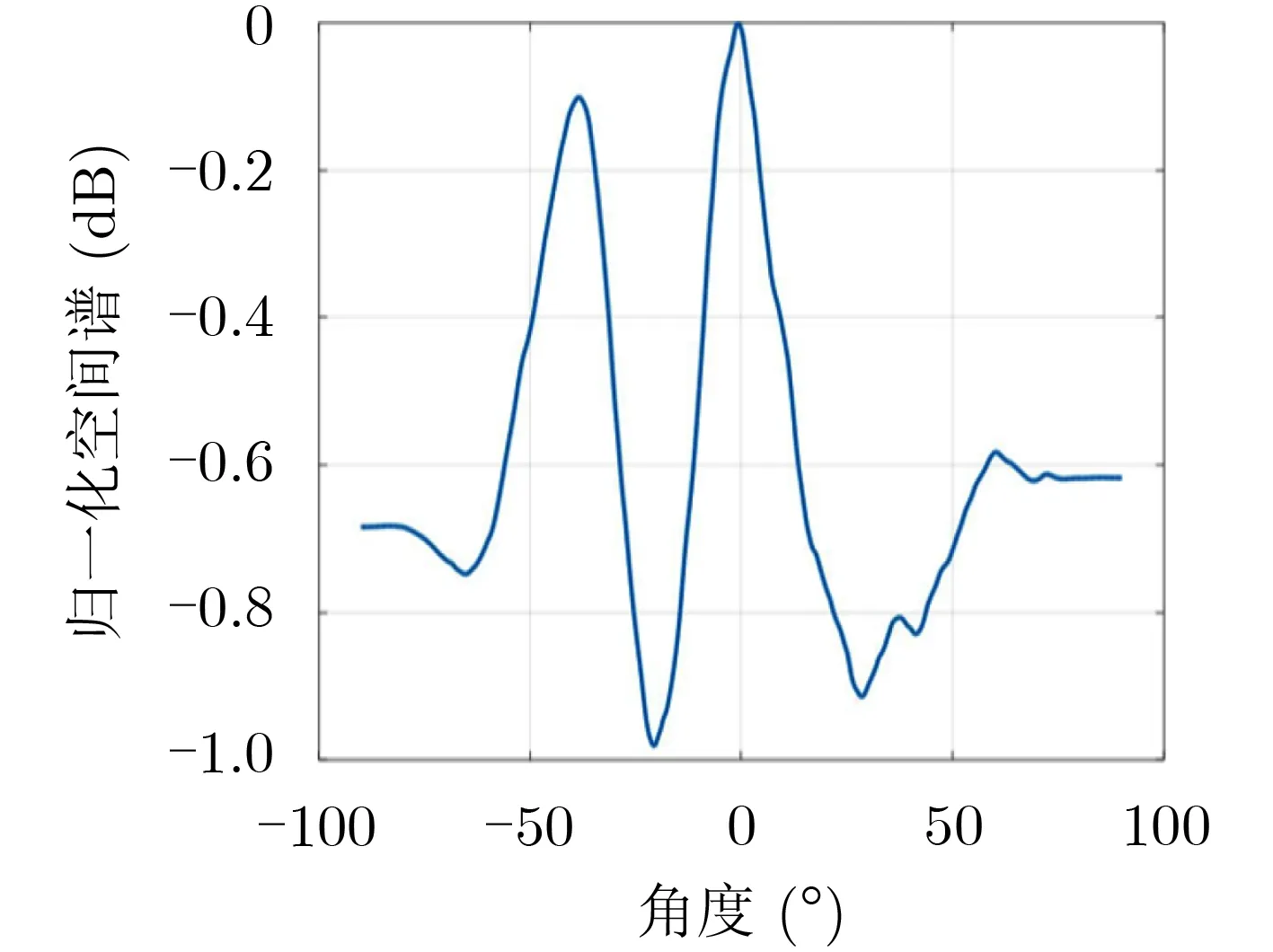
图12 估计的空间谱
在传输M元CSK调制的信息信号时,我们分析了3种情况下的通信系统:单水听器接收信号、VLA接收信号的同相叠加和VLA接收信号后的空时处理。以单个信号为例,当采用不同的接收方法时,接收机处第1个码元MCSK的归一化相关结果如图13所示。对单个水听器接收到的信号进行处理,归一化相关结果没有明显的峰值,容易出现误判。当VLA接收到信号并进行同相叠加时,归一化相关结果显示出明显的峰值。对接收信号进行空时处理后,相关结果的峰值最为突出,错误判决的概率最低。为了量化相关判决的效果,计算了3种接收模式下判决矩阵中的最大值与其他判决值的平均绝对值之比,并把所有码元的比值进行统计平均,列入表4中。当处理信号水听器接收到的信号时,第1个码元判决矩阵峰均比为2.6962,最大值的位置为误差。当将VLA接收到的信号同相叠加时,第1个码元判决矩阵峰均比为4.8152,解码正确。当使用空时处理器时,第1个码元判决矩阵峰均比5.0616,解码是正确的。
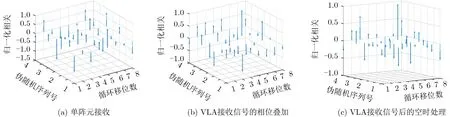
图13 不同接收模式下M元CSK判决归一化相关输出结果
不同接收模式下通信系统的平均误码率如表4所示。可以看出,VLA接收到的信号的相干叠加可以有效地提高接收机信息的正确判决概率。当VLA接收到有用信号时,其能量增加,从而获得了空间增益。当使用空时处理器时,系统的抗误码性能会略有提高。由于空时2维联合处理可以同时获得空间增益和时间增益,接收信噪比得到显著提高。

表4 不同接收模式下MCSK调制的平均判决矩阵峰均比与误码率
6 总结
本文介绍了一种基于空时处理的水声扩频通信技术。该技术利用UWA信号的时空分簇特性对接收信号进行处理,先用阵列接收信号估计多径的入射角,再对这些入射方向形成波束,对每个波束输出的多径信号进行Rake接收判决,最后对各波束输出信息进行合并,相同信噪比下,误码率比单水听器接收或单波束接收都更低,可有效提高可靠性。本文详细介绍了空时处理器的工作原理,并通过仿真和水池实验验证了方法的有效性。
