基于信任值的车联网分层共识优化协议
2022-06-24翟宝琴王健韩磊刘吉强何嘉豪刘天皓
翟宝琴,王健,韩磊,刘吉强,何嘉豪,刘天皓
(1. 北京交通大学智能交通数据安全与隐私保护技术北京市重点实验室,北京 100044; 2. 北京计算机技术及应用研究所,北京 100854)
0 引言
融合物联网、人工智能等技术的智能交通技术为交通管理、自动驾驶、物流服务等提供了有力支撑。智能交通应用通过车联网[1]可以实现车辆间和车路间通信,支持车辆及时获取环境信息,以提供各种智能交通服务。
与此同时,车联网面临诸多安全问题。且随着车联网节点增多,信息存储增加,车联网存在单点信息负载、信息安全、信息更新效率等问题[2]。区块链[3]具有透明性、匿名性、分布式等特点受到广泛关注,特别在交通领域,利用区块链技术可构建一个安全可靠的交通系统,解决数据存储、隐私安全、数据篡改和身份验证等问题[4-5]。同时可结合信任机制、智能合约、机器学习等第三方技术进一步解决安全等问题。Chen[6]等利用信任管理构建双层区块链进行数据共享,确保数据传输安全并提出相关激励措施鼓励节点间信息共享,同样Yang[7]等为车辆赋予信任值,并以此判断信息虚假情况且利用节点信任值激励车辆表现良好;可在传输存储数据时,保证数据安全的前提下,通过智能合约[8-9]、机器学习,合理分配共享数据。
引入区块链解决系统安全性问题时,系统需要消耗大量计算开销、数据存储等满足数据共享服务。其中对于数据存储更新问题,当全网信息同步更新时,随着车联网节点增多,车辆速度变化快,当数据共享网络信息同步速度不匹配车辆节点移动速度时,时延问题可能会造成不同区域信息不一致、车辆得到无意义旧数据等问题。
综合上述车联网中安全性与信息更新等问题,本文主要工作如下。
1) 提出基于区块链与信任值的RSU分层代理框架,在网络结构分组的基础上,将区块链应用于车联网中,解决单点信息存储及安全等问题。
2) 提出基于信任值的RSU链分层代理信任共识优化,在信任值的基础上通过选举组领导节点,并在领导间进行全网信息同步更新,提升信息更新效率,减少系统时延,满足车辆节点获取最新信息的需求。
3) 从通信复杂度、算法时延、容错率和安全性等方面进行实验分析,验证本文提出方案的正确性。
本文对比了4种共识结构后挑选出最符合场景需求的共识结构——自下而上的共识结构,并提出分层共识中领导节点选取算法,保证系统安全性,实验证明所提方案在通信复杂度、时延、容错率及安全方面均表现良好。
1 相关技术研究现状
车联网作为互通网络,可通过感知层收集、上传各类交通数据来服务于数据共享。为进一步加强车辆间合作共享道路信息,提升交通效率,研究者采用集群方式增强沟通[9-10],并设计相应安全协议。但交通道路中车辆数目、交通数据增加,将造成存储压力、数据安全等问题。将区块链技术应用在车联网中[6-8],可解决隐私安全问题[11],缓解存储压力等,同时也可利用共识等机制安全完成信息共识。
在引入区块链技术的基础上,为进一步提升系统可靠性及效率,研究者将区块链进行分层操作,在分层方面,主要有网络结构分层及共识分层。Singh等[12]基于区块链构建多级网络模型用于安全监控,确保身份信息安全,增强系统可靠性,但增加了系统管理开销。Rashid等[13]提出基于区块链技术的多层安全网络模型,利用遗传算法、粒子群优化算法等,将网络划分为K个集群,并选举出群领导组成公有链同步信息,但在具体物联网场景下随着网络规模增大,公有链进行共识则会造成一定网络时延。Hou等[14]构建多层区块链,将用户根据一定安全级别进行分组,将不同层级的数据存储至相应层级的链中,从而实现安全的数据访问控制。同样,为保证数据安全、可追溯,Aujla等[15]和丁庆洋等[16]针对车联网和市场产品将区块链分层,减少系统时延开销。但是目前研究大多数针对网络结构分层,为进一步减少时延,可以在结构分层的基础上进行共识优化。
在针对共识优化的研究中,为进一步保证共识算法安全性、伸缩性,符合不同场景需求,将需解决问题及解决方案总结,如表1所示。
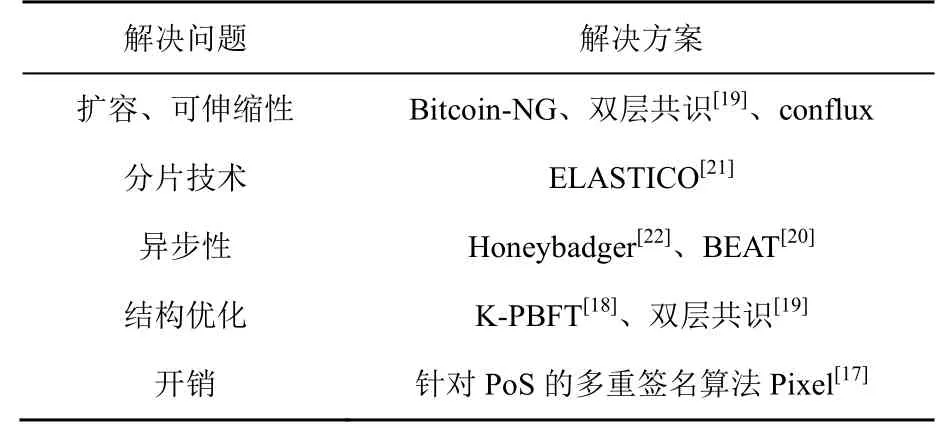
表1 共识优化解决方案Table1 Solution of consensus optimization
针对共识问题的探讨主要分为两部分,即系统性能与安全性。在性能方面,有研究者关注到共识顺序[10],传统拜占庭协议要求正确节点达成一致,但忽略具体达成协议的顺序,研究者赋予节点信任值,依据信任值对顺序进行探究;在针对共识中带宽与存储的要求,PoS(proof of stake)的多重签名算法Pixel[17]可大幅度减少开销;为进一步降低共识复杂度,研究者对共识结构做出优化,利用聚类算法[18]将节点进行分组并选出组领导节点,组内共识后,领导节点进行共识。利用相同思路,可将双层共识结构推广至多层,Li等[19]在提出双层协议后,探究其可伸缩性。在提升系统性能的同时,仍需确保安全性,由于异步协议相较于同步协议更能保证系统安全性,如在抵抗DDoS攻击时具有更强的鲁棒性,因此Duan等[20]进一步提出异步共识协议,并在吞吐量、时延方面做优化;推广后做出分析。在上述方案中仍需考虑具体场景的结构问题。
本文主要解决车联网场景中高效共识问题,随着车辆节点增多,如何在车辆高速移动环境下完成信息共识,即车辆在区域间移动时可保证数据同步更新且一致成为关键。其中共识结构优化可减少全局共识时延,提升信息共识效率。针对共识结构分层,当前解决方案主要有:双层结构[19](可拓展至多层)、聚类结构[18]、树形结构[23]等,为进一步筛选出适应本场景的结构,本文对具体结构进行了分析比较。
2 基于信任值的RSU链分层代理共识优化协议
本节首先介绍系统模型,在对比传统结构后,为本场景选择最适合结构,并介绍了分层中组领导节点选取算法,最后给出了分层协议流程。
2.1 基于区块链的车联网系统模型
由于协议主要研究车联网共享信息时同步更新效率,因此该车联网系统主要由两部分组成,即路边单元(RSU,road side unit),以及装备车载单元(OBU,on-board unit)。系统模型如图1所示,车辆可从授权信任中心注册并获取初始信任值,在信息共享过程中,基站可根据车辆表现情况进行信任值更新,为确保车辆进入下一个区域前,基站维护的车辆信任表得到及时更新,基站链需快速安全地实现信息共识。
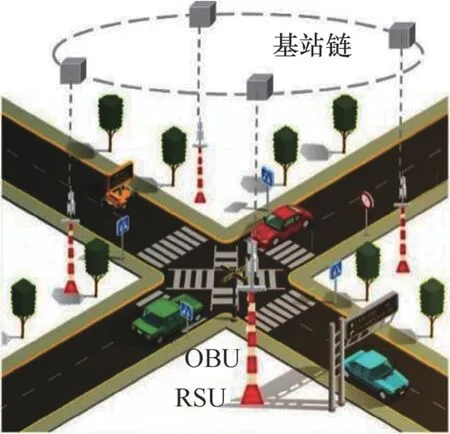
图1 系统模型Figure 1 Model of system
本文主要研究信息同步问题,因此将围绕如下主体进行研究。
OBU:在车联网中代表车辆,是分享交通信息的主体,车辆每次采取就近原则与距离最近的RSU通信。
RSU:在系统设计中,在关键路口处会放置RSU,用来收集车辆发送来的关于此路口的交通信息,并且所有的RSU组成基站链,用来同步RSU维护的车辆信任列表,在区块链技术的基础上,同步车辆信任值列表。这些基站都拥有相同的计算力。
信任管理:在车联网中车辆共享交通信息时,为确保共享信息过程中车辆的隐私安全性,可为每辆车颁发假名保证通信匿名,并为每辆车设置信任值,辅助判断交通信息的正确性。本文考虑车辆信任值保存在RSU链中利用区块链去中心化、可追溯性等特点做网络统一管理,与其他方案不同的是,本文系统模型的车辆不知道本身信任值,信任值只存于RSU链中,可继续服务于辅助交通信息判断等。由于本文以共识结构优化为主,因此以RSU链为主要介绍对象,对其中的全网共识统一信任信息做出研究。
2.2 分层共识结构对比
在当前共识结构中,所有节点为一组共同参与PBFT算法;也有采用分层类型、树形结构等来优化共识协议,以适应各种场景达到高效需求。在车联网协议中,需考虑如下指标。
(1)速度
由于车辆移动速度快,在到达下一个基站,车主有可能上传交通信息,因此时延为重要参考因素。
(2)网络容错率
在车联网交通数据共享协议中,在保证安全的前提下,使更多节点参与。
(3)通信复杂度
随着通信复杂度的增加,时延成正比增加。
本文将从上述3个方面展开与其他方法中所提模型进行对比,从而为本场景提出最佳共识结构。
(1)两层PBFT共识协议
两层共识协议分为自下而上和自上而下两种共识结构。
1)自下而上的两层协议共识结构,如图2所示。
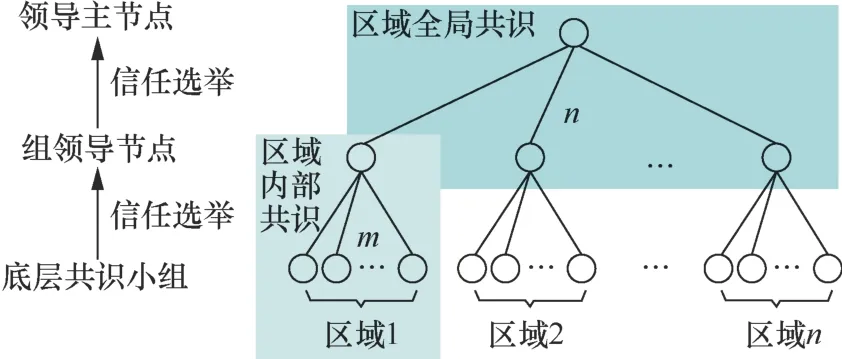
图2 自下而上两层协议共识结构Figure 2 The structure of bottom-up two-layer consensus protocol
首先进行区域划分,在确定组领导节点后,所有组领导节点在组成第二层即领导层。采取此种方式共识,需先在组内进行共识,当组领导节点在第一轮共识确认阶段收到了超过2/3的节点消息时,向领导主节点发出请求,领导主节点将请求排序后广播进行第二轮共识。在第二轮共识中,组领导节点在确认阶段收到2/3节点消息时,即可回复与广播至组内。
2)自上而下的两层共识结构,有学者提出自上而下共识协议[19],具体应用在本场景中,其结构如图3所示。
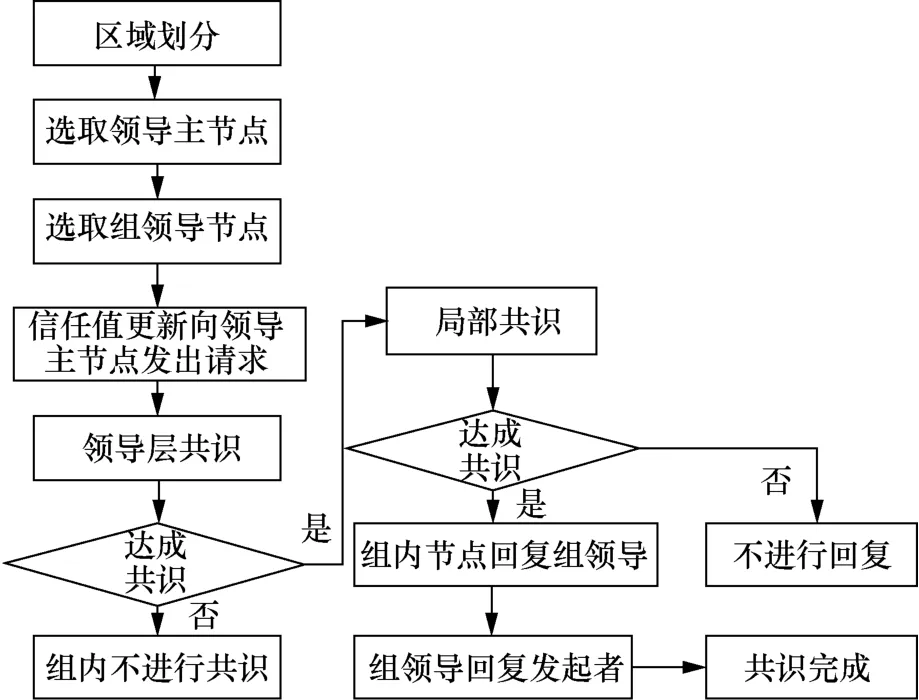
图3 自上而下两层共识协议结构Figure 3 The structure of top-down two-layer consensus protocol
对于自上而下共识来说,与本文分层(自下而上)一样首先要进行区域划分,并且在区域划分时,要考虑通信复杂度问题。从理论上分析,采取自上而下共识时,基站首先将更新信息打包,向领导主节点发出申请,在领导层共识完成后,各个组领导节点仍需将更新信息广播至域内进行第二次共识,假设有m组,则共需要进行m+1次共识操作。但是在自下而上协议中,考虑到可信度问题,即组领导节点在域内共识完成后需交给领导主节点进行第二次共识,在领导层共识中,当其他域组领导节点接收到2f+1个确认信息后,可直接向域内广播,不再进行共识,即本文提出的自下而上的协议只需要两次共识,因此在通信复杂度方面优于前者。
(2)基于树形网络拓扑结构PBFT共识算法
树形共识协议[23]结构如图4所示,在树形共识协议中,只有最底层子网运行完整的PBFT协议,高层子网在共识时,将准备阶段与确认阶段结合。树形结构的提出可以降低通信复杂度。但是在树形结构中,可靠性成为关键问题,并仍然存在下述问题。首先,树形结构确认,树形结构建立在全网的基础上,依据信任值进行统一划分,但在实际车联网场景中,按照区域(地理位置)划分更符合实际场景需求。其次,参数确定,在构建网络时,假设每个子网中有k个节点,则树形结构为满k−1叉树,文献[23]给出通信复杂度公式,但对于层数确定和子网内节点数目的确定,以达到最小通信量,文中没有给出解决方案。最后,动态调整问题,在车联网场景下,基站是确定因素,但车辆是不可预测性因素,因此基站可信度一直处于动态变化中,如果采用树形结构,则每完成一次共识,需要重新评估各个基站信任值,进行动态调整。
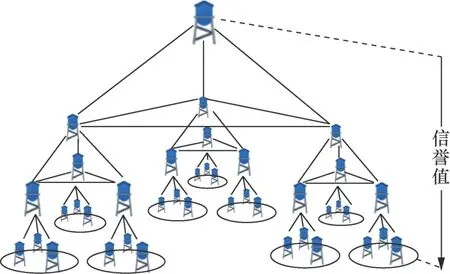
图4 树形共识协议结构Figure 4 Tree consensus protocol structure
(3)基于聚类算法的K-PBFT共识机制
在聚类算法K-medoids的基础上,与PBFT相结合形成K-PBFT机制[18],其思想为:首先将社会公信度较高的节点作为集群中心点,并且中心节点改动概率较小,其余节点则根据聚类中心,采用相似度(距离等)算法,找到所属中心,完成聚类工作;其次,在聚类完成后,节点首先向各个集群中心点提出申请,在组内完成共识后,在主节点层进行第二次共识操作,当主节点层达成共识后,主节点广播至集群内。聚类共识协议结构如图5所示。
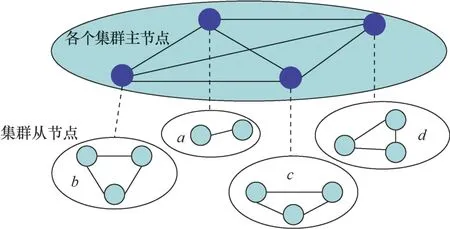
图5 聚类共识协议结构Figure 5 Clustering consensus protocol structure
在具体车联网场景下,按照聚类思想可以将距离较近的基站聚为一类。其优点为在两层共识结构的基础上,可以加一层监管机构,使得每一次信任值得到监督,但存在中心节点更换问题与聚类参数确定问题。原始方案中可以根据相似度进行聚类,但在车联网中,基站之间在地理位置、完成度方面可能存在差异,在计算能力方面相当,并且可信度还与周围车辆有关,因此在相似度方面,距离因素占主导地位,即聚类退化为按照区域划分。
不同共识协议结构性能对比如表2所示。

表2 不同共识协议结构性能对比Table 2 Comparison of structure and performance of different consensus protocols
其中,m代表组数,n代表组内节点个数,s'代表最底层子网树,s代表总子网数,k为子网中节点个数。不同共识协议结构优缺点对比如表3所示。

表3 不同共识协议结构优缺点对比Table 3 Comparison of advantages and disadvantages of different consensus protocol structures
在优化单层结构的基础上,考虑到容错性、速度以及基站可信度等问题,K-PBFT及树形结构存在参数不确定、动态结构调整复杂等问题,造成一定系统时延开销,考虑到车联网场景对时延要求较高,因此从双层结构进行考察。在两种双层结构中,为保证速度快、扩展性强,即随车辆高速运动,网络结构需有良好扩展性以适应拓扑结构的快速变化,本文采用自下而上的双层共识协议。
2.3 基于信任值的RSU组领导节点选举
综合车辆与基站考虑,其组领导选举主要因素有节点参与程度、工作完成情况及消息价值度。相关定义如下。
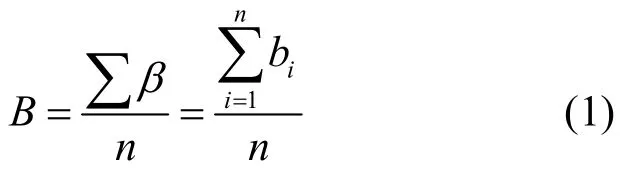
定义1节点参与程度b,其中每个基站的活跃程度,都由其参与节点决定,车辆活跃度可与其发送消息频率有关,则对于第i个基站RSUi,其参与程度集合为β={b1,b2,b3,…,bn},其中bn表示在Δt时间内第n辆参与车辆的发送消息频率,则每个基站的参与程度指标B计算如式(1)所示。
定义2节点共识完成率C,表示基站在共识中表现情况,假设RSU基站完成事件个数为s,未完成事件个数为f,则节点共识完成率C计算如式(2)所示。

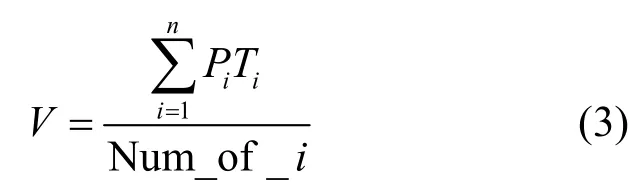
定义3平均每条消息价值度V,在固定的选举周期Δt内,假设RSU共处理事件n件,其事件集合为:MΔt={M1,M2,M3,…,Mn},对于每个事件发生概率,根据贝叶斯公式评定集合为PΔt={P1,P2,P3,…,Pn},并且所有参与车辆的信任值集合为TΔt={T1,T2,T3,…,Tn},其中Tn代表对于事件n,参与车辆信任值集合,假设参与事件共i辆车,表示为Num_of_i,则Tn={t1,t2,t3,…,ti}。在知道上述条件情况下,基站RSU的平均每条消息价值度表示如下。
定义4区域i的基站j的可信度Dij,将上述可信度影响因子综合起来,在每次选举领导节点时,区域i的基站j的可信度如式(4)所示,其中n代表基站j收集交通信息的参与车辆集,共处理事件m个,ijV′表示前一次可信度的测量值。
2.4 分层共识过程
在实际车联网运行环境中,考虑车辆活动范围,离车辆较远地区的基站,则可以暂时不更新。因此分层共识协议中,事务排序需增加距离、信任度等进行衡量,并在分层共识选举领导时,引入可信度,基站可信度的衡量主要依赖车辆与基站本身,其分层共识协议流程(如图6所示)如下。
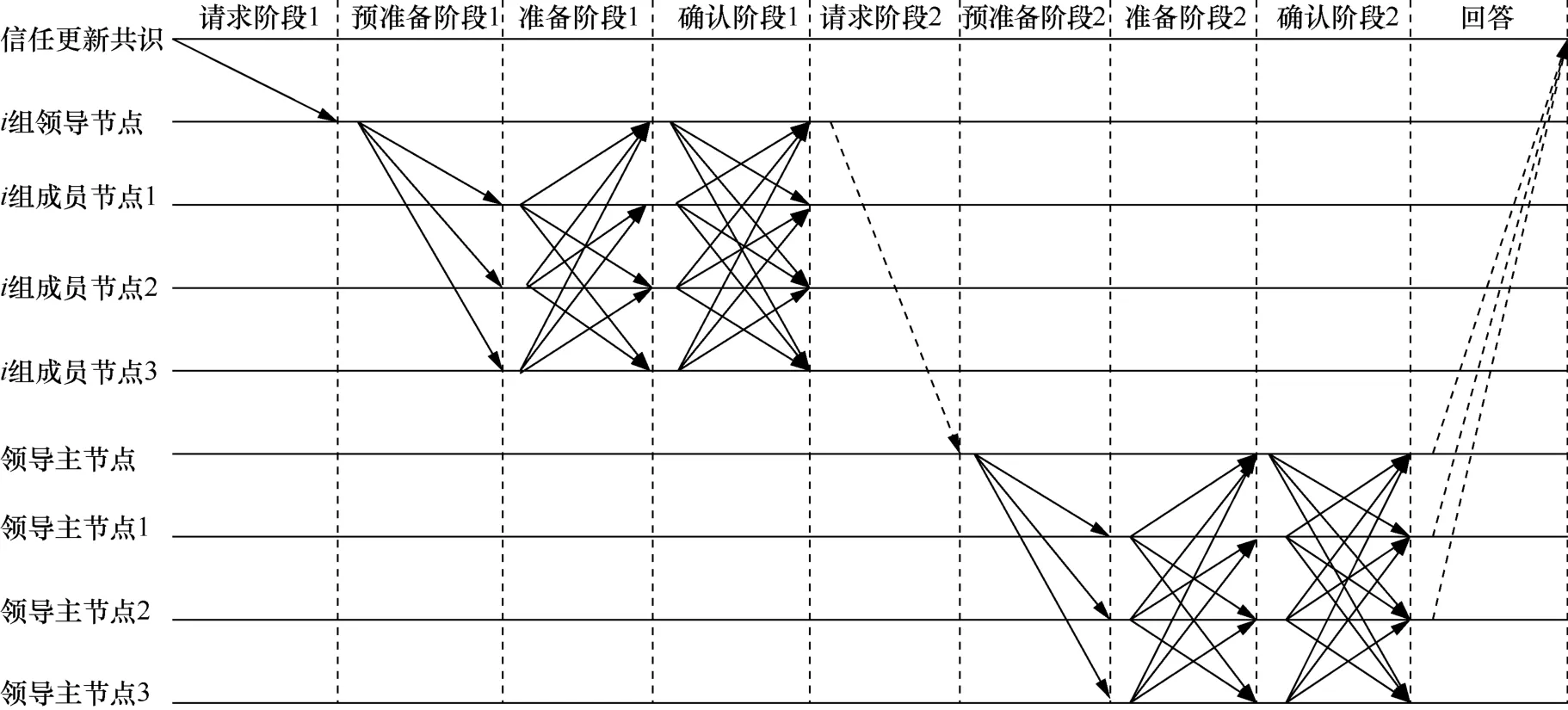
图6 分层共识协议流程Figure 6 Process of hierarchical consensus protocol
选举组领导节点,进行局部共识,局部共识后,在组领导节点中选举可信度最高节点作为领导主节点(见2.3节),进行全局共识。
1)区域划分:根据通信复杂度计算公式,计算出最佳分组数目。
2)选举组领导节点:依据信任度影响因子进行可信度评估,选举出每个区域可信度最高的RSU基站作为组领导节点。
3)局部共识。
① 提出请求,假设对于基站i有n辆车需要进行信任值更新,则申请消息为:,其中σi为签名。
② 预准备阶段,领导节点对收到的请求分配序列号,向组内所有节点群发预准备消息,其中m表示请求消息,v表示视图编号,n表示序列号,d表示请求消息的摘要,组领导节点将上述消息签名打包后进行签名,并附上消息m,广播至组内。
③ 准备阶段,当节点接受预准备消息时,信息验证准确后节点接受预准备消息进入准备阶段。此时节点向组内所有节点广播准备消息。
④ 确认阶段,当节点收到来自2f+1个准备消息时对每条消息做上述验证,验证均正确时,进入确认阶段。此时节点将广播到域内,当组领导节点收到超过2f+1个确认消息,且验证通过时,完成确认阶段,此时组领导节点将向领导主节点发出申请。
4)选取领导主节点,领导主节点的选取与组领导选举相同,即选取可信度最高的节点作为领导主节点。
5)进入全局共识,在全局共识中,与局部共识相似,组领导节点将一定时间此区域内需要更新的信任值列表打包发出申请,,。其中σleader为领导主节点签名。并且在领导层进行全局共识,同样经过预准备阶段、准备阶段、确认阶段。详细过程与组内共识类似,不再赘述。
6)回复消息与域内广播,当第二层共识节点,即各个域组领导节点收到2f+1条确认消息,并且消息均通过验证,向提出申请基站进行回复,同时各个组领导节点进行域内信任值列表更新广播。
3 实验结果与分析
本文实验将从安全性、通信复杂度、时延、容错率方面对车联网所需指标进行分析。
3.1 安全性分析
(1)安全目标
1) 基于RSU身份签名消息的不可伪造性,在共识过程中,请求、预准备、准备等阶段中, RSU为身份唯一的半可信实体且签名采用其私钥,因此基于RSU签名具有不可伪造性。
2) 对安全攻击的抵抗性。本文所提共识协议,可抵抗重放攻击、中间人攻击、女巫攻击、日蚀攻击、窃听及篡改攻击等。
3) RSU身份不可伪造性。RSU作为半可信实体,不会借用其身份主动发起攻击,且TA与RSU间传输信道安全,在初始TA为其颁发身份时,敌手无法获取。
4)RSU共识数据不可篡改性。当RSU被敌手控制时,篡改数据库,将虚假消息进行共识请求,RSU在摆脱攻击后应能恢复数据库并进行正确信息共识,覆盖原有错误信息。
(2)攻击模型
从攻击者角度分析,下面将从两类攻击模型展开讨论。
1) 底层节点,由于节点分层时以地理位置划分,因此底层攻击者可根据实际地理位置,控制邻近RSU,且由于节点在参与程度、工作完成情况、消息价值度等衡量指标中是不确定且动态改变的,因此底层节点共识与普通拜占庭容错共识一样。二者容错率都为1/3,所以当敌手控制组内2/3以上节点时,即可完成组内攻击;如果敌手控制底层节点被选举成组领导节点,即可对更新数据进行篡改攻击等,并扰乱第二轮共识。
2) 领导层节点,当敌手控制组领导节点,此时在第一轮共识的基础上,敌手可更改信息,扰乱第二次共识;领导层节点完成共识后,敌手在组内广播信息时展开攻击。
(3)正确性分析
对本协议进行正确性分析时,主要判断所提共识协议结构是否满足安全目标。
1) 基于RSU身份签名消息的不可伪造性、RSU身份具有不可伪造性。由于共识算法中消息包含公钥签名、消息验证编码及基于哈希函数生成的消息摘要,因此可防止消息被破坏;由于共识算法中消息包含公钥签名、消息验证编码及基于哈希函数生成的消息摘要,因此可防止消息被破坏。由于TA和RSU之间信道安全,因此敌手无法窃听其身份信息,同时不会发动与身份相关类型攻击。
2) 抗攻击分析包括对重放攻击、中间人攻击、女巫攻击、日蚀攻击的分析。由于PBFT共识算法本身在接受消息时,判断消息来自不同RSU签名消息即消息数量增一,多次重复发送无意义。针对每个RSU,由于其作为半可信实体,签名消息无法伪造,因此可抵抗有关身份的中间人攻击与女巫攻击。并且RSU分组依据地理位置,因此受地理位置约束,可抗日蚀攻击。
当敌手控制底层节点时,敌手需控制组内大多数节点才可以完成篡改后消息的共识,增加敌手攻击难度,并且敌手无法提前预知。当敌手控制组领导节点,扰乱组内共识时,即收到组内大多数节点确认节点,但不上报,由于敌手控制短暂且组领导节点会进行更换,基站在一定时间内收不到回复,可再次发起共识申请;由于节点参与程度、工作完成情况、消息价值度等衡量指标为不确定因素,因此敌手无法准确锁定组领导节点;当敌手扰乱领导层共识时,敌手想控制大多数领导节点难度较高,因此系统可避免此类攻击情况。
3) 共识数据不可篡改性:当敌手控制RSU节点时,如果敌手篡改数据并将虚假消息进行共识,但敌手很难控制组内大多数节点,因此共识失败。敌手难以获取RSU身份信息,伪造共识发起请求;当RSU摆脱敌手控制,发现与链上多数节点数据不一致时,进行改正。
因此,本文所提共识协议结构可实现安全目标,确保系统安全性。
3.2 通信复杂度分析
在RSU数量一定的情况下,如何分组,即分多少组,每组多少个RSU,才可以在总数确定的情况下尽量减少通信次数。为了找到最小值,并与原有PBFT方案进行对比,本文将通信过程次数做出如下假设:
假设一共分为m个共识小组,每组中有n个RSU,则在PBFT的3个阶段中,每个阶段的开销分析如下。
子群在第一次共识时,首先进行PBFT共识。
(1)预准备阶段,每小组主节点将消息广播至各个节点,此时通信开销为n−1。
(2)准备阶段,此时各个收到消息的RSU节点会向组内除了自己节点外发送验证消息,此时开销为(n−1)(n−1)。
(3)确认阶段,在这个阶段中,所有节点收到了上一个阶段中其他节点发来的验证消息,节点进行确认,并统计收到消息数量,此时开销为
n(n−1)。
进行第二层节点共识,由于有m个小组参与共识,因此在第二层中共有m个节点参与。
(1)预准备阶段,当每个小组信任度最高的主节点接收到小组内的确认反馈时,将此条消息广播至第二层所有节点中,此时通信开销为m−1。
(2)准备阶段与确认阶段的通信开销与底层第一轮共识类似,则其通信开销为m(m−1)+ (m−1)(m−1)。
(3)回复与广播阶段,当各个组领导节点完成共识需要回复请求基站,通信量为m,且各个组领导节点需要在域内进行共识,则开销为mn。
将两轮共识完整实现之后,从客户端向主节点发出请求到主节点完成共识广播至域内,总通信复杂度如式(5)所示。

其中,假设总节点数为T,则T=mn,将m用T/n替换,则可得式(6)。

此时根据求导公式,求出极值点找到其中最合适的点,即可在确保通信复杂度最低的情况下获得最佳小组RSU数目。
在分层数目与组内成员个数相同的情况下,本文进一步与文献[19]提出的自上而下分层结构方案进行通信复杂度比较,对比结果如图7所示。从图7中可以看出,自下而上的方案更有利于通信复杂度的降低。

图7 通信复杂度对比实验示意Figure 7 Comparison experiment of communication complexity
3.3 分层共识算法时延对比
为了实际研究分层共识的速度提升变化,本实验采用Java环境模拟两层协议,实验硬件配置如表4所示。在Java环境模拟中,节点位置在一定范围内随机生成,并且节点间通信时延与节点间距离成正比。本实验将分组设定为3,然后与原协议时间对比。本文提出的双层共识协议与单层PBFT协议在时间上的对比如表5所示。
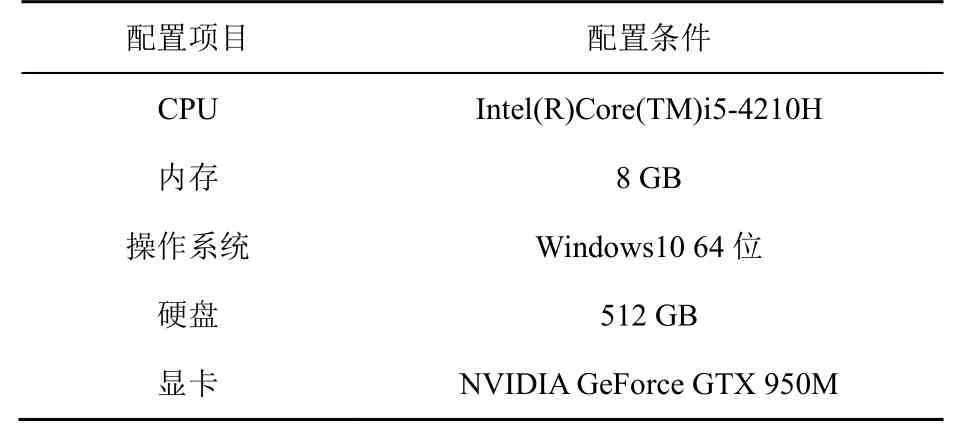
表4 实验硬件环境配置Table 4 Experimental hardware environment configuration

表5 双层共识协议与PBFT协议时间对比Table 5 Time comparison between two-layer consensus protocol and PBFT protocol
双层共识协议与PBFT协议时延对比如图8所示。
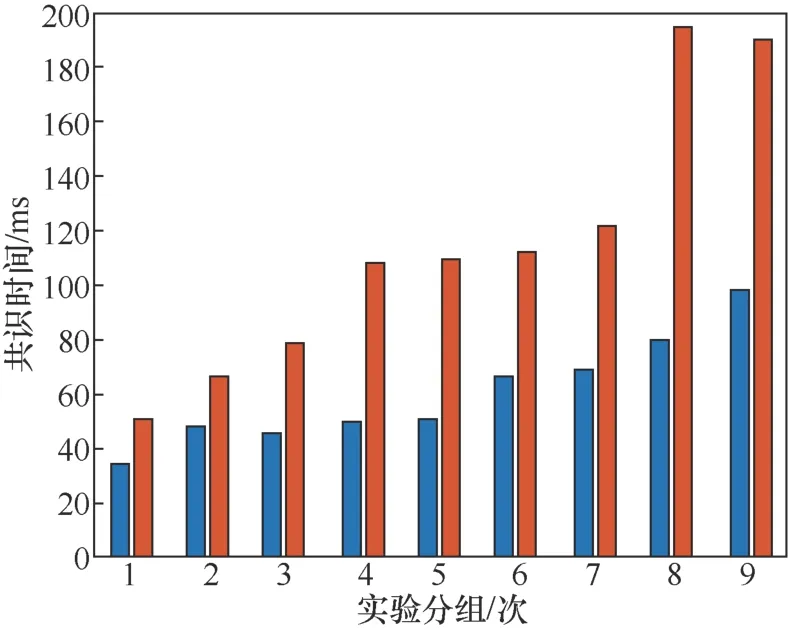
图8 双层共识协议与PBFT协议时延对比Figure 8 Comparison diagram between the two-layer consensus protocol and PBFT protocol
可以看出,采用分层结构,可大幅度减少时间开销,在最后一组实验中,201个节点的不分层时间比183个节点多,这是因为随着节点个数增加,在模拟实验中,当每次通信超过一定时间限制时则认为超时,即认为投票失效,所以在节点数量多的情况下,应采用分层结构,这样不仅能缩短时间,还能降低节点超时率。
3.4 容错率分析
采用两层共识协议,达成共识的条件为:在底层组内达成共识的前提下,领导层也完成共识。因此,假设事件P(A)为底层组内达成共识,事件P(B)为领导层达成共识,事件P(C)为最终达成共识,则P(C)=P(A)P(B|A)。
在本文协议提出的两层共识中,底层执行经典的PBFT协议,即只要有不超过1/3的失效节点,即可成功达成共识。而对于领导层节点来说,在第二层共识时,只要对应组领导节点共识通过,那么组内不需要再进行共识,可以直接广播信任更新信息。因此对于领导层节点来说,其是否接受共识,取决于其失效概率。事件A的概率值如式(7)所示。
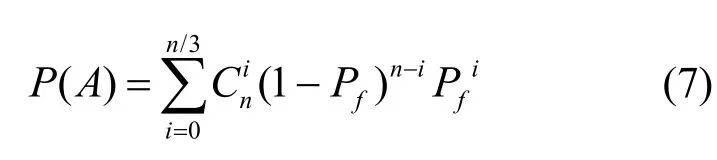
其中,Pf为节点失效概率。
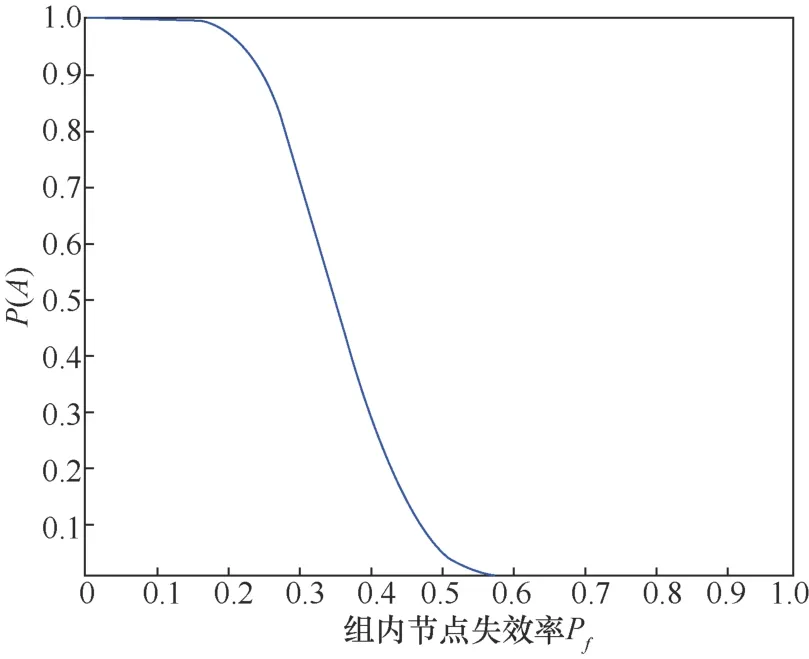
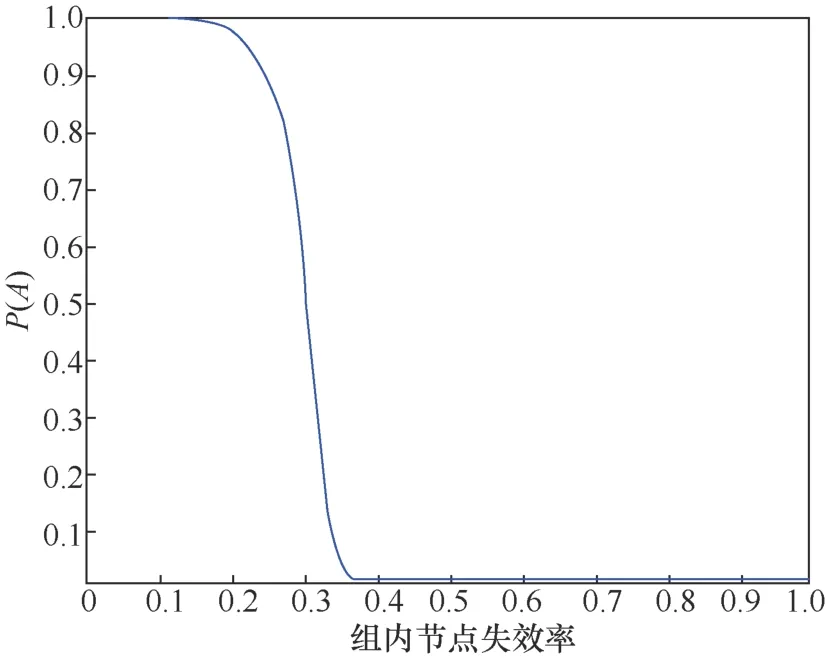
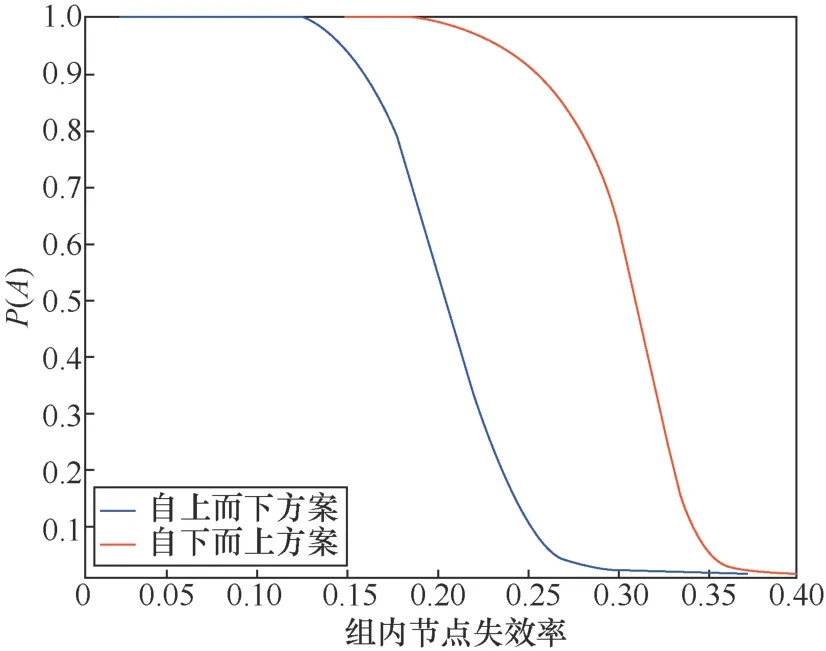
假设在m个组中,有j组完成了共识,即第二层共识中,有j个组领导节点参与,则进入第二轮共识的条件为m/3 事件A发生概率如图9所示(n=30)。 图9 事件A发生概率Figure 9 The probability of event A 根据式(8)可推得式(9)。 事件C发生概率(m=30,n=30)如图10所示,将自下而上方案与自上而下方案[19]进行比较,如图11所示。 图10 事件C发生概率Figure 10 The probability of event C 图11 事件C发生概率对比Figure 11 Comparison of the probability of event C 从图中可看出,本文方案的容错率更高。在节点失效率达到0.4时,成功率趋于0,但在自上而下方案中,当节点失效率为0.3时,成功率趋于0。由于在车联网中,基站需要完成收集交通信息,计算信息发生概率以及信任更新共识等任务,在共识过程中,考虑到信任值更新需要从一个基站出发,更新至全网,即需要尽可能多的节点参与并成功达成共识,因此,需要容错率高的协议。 车联网作为智能交通基础平台,为解决其数据安全问题,可引入区块链技术,针对实际场景应用中,为了符合速度、容错率以及减少通信量的需求,在原有共识结构上进行改造。在对比4种典型结构后,挑选出最符合场景需求的共识结构——自下而上的共识结构。并且划分区域,引入车辆信任值、车辆活跃度等因素,提出了相关领导节点选取算法等。在上述基础之上,设计具体分层共识步骤。实验验证本文所提双层共识结构符合本场景安全需求;在确定通信复杂度情况下优于自上而下方案,同样相较于此方案,确保安全的前提下,增大容错率尽量让尽可能多的节点参与,更适合本场景;相较于原共识方案,随着节点数量增多,可将时延缩短1/2以上。综上所述相较于其他结构,本文提出的自下而上的分层共识结构最适用于本场景。在今后工作中,可将双层协议拓展至多层,同时,也可根据周围车辆信任值考虑共识顺序问题,进一步提升共识效率,并对基站进行统一管理工作,提升系统整体安全性。

4 结束语
