麦克纳姆履带式爬壁机器人磁吸附单元结构设计与仿真
2022-06-24李振洋王战中袁亚强
李振洋, 王战中, 袁亚强
(石家庄铁道大学 机械工程学院,河北 石家庄 050043)
0 引言
随着磁力爬壁机器人技术不断的发展,爬壁机器人的种类越来越多,其可以在各种倾斜角度的导磁壁面上运动,能代替人类在高空、危险、极限情况完成一些特定作业,如今已广泛应用于风力发电机塔筒表面清洁维护、大型储油罐检测、船体清洁等工作中[1]。
磁力爬壁机器人在作业时通常要携带清洗装置、检测仪器、维修设备等,所以要求其具有一定的负载能力。然而磁力爬壁机器人的负载能力越强就要求磁吸附装置提供的磁吸附力越大,但是磁吸附力是影响爬壁机器人运动灵活性的重要因素之一。传统履带式磁吸附爬壁机器人的磁吸附单元安装在履带链节上,相对于链节的方位是固定的,当移动到履带链节与工作壁面脱离时,磁吸附单元会产生一个磁力阻力矩影响爬壁机器人的运动平稳性,增加驱动电机的功率消耗。针对此问题,王军波等[2]和张俊强等[3]设计出一种适用于履带式爬壁机器人的磁吸附力可调的磁吸附单元,通过改变磁极方向调节磁吸附力大小,一定程度上能够减小履带脱离工作壁面时的阻力矩,但是由于采用传统履带和传统磁路,爬壁机器人运动灵活性差且磁吸附装置产生的磁吸附力较小。
为了进一步提高单位体积永磁铁产生的磁吸附力,又能有效减小履带与工作壁面脱离时的磁力阻力矩,同时提高爬壁机器人的运动灵活性,提出一种基于麦克纳姆轮原理的履带式爬壁机器人,并对其磁力吸附单元的结构和磁力调节方式进行详细研究与仿真分析。
1 麦克纳姆履带式磁吸附爬壁机器人
1.1 麦克纳姆履带式磁吸附爬壁机器人结构
麦克纳姆轮式爬壁机器人是一种全向移动爬壁机器人,具有较高的运动灵活性,但其负载能力较小;履带式爬壁机器人具有较高的负载能力和运动平稳性,但其运动灵活性较低。为提高爬壁机器人运动灵活性、平稳性和负载能力,提出一种麦克纳姆履带式磁吸附爬壁机器人,结构如图1所示。

图1 麦克纳姆履带式爬壁机器人结构
机器人的移动模块由4条麦克纳姆履带组成,履带每个链节上都装有磁吸附单元,履带内侧装有导轨,在履带链节脱离工作壁面过程中,导轨上的导槽能够调整履带链节磁吸附单元的方向,进而调低磁吸附力,降低磁力阻力矩。麦克纳姆履带分为A、B型2种,A型履带辊子轴线与链轮轴线夹角为45°,B型履带辊子轴线与链轮轴线夹角为135°,机器人对角的2条麦克纳姆履带为相同类型的履带。通过控制每条麦克纳姆履带的转向实现爬壁机器人的全向移动。
通过在SolidWorks软件中对机器人各个零部件赋予材料属性可知机器人本体自重约为80 kg。设计的爬壁机器人主要用于风力发电塔筒表面的清洁和维护工作,机器人工作时需要携带清刷装置和维护设备,其负载能力应大于50 kg。通过计算可知,爬壁机器人稳定在垂直壁面运动时需要磁吸附力为3 200 N,麦克纳姆履带式爬壁机器人一共有40个磁吸附单元产生磁吸附力,每个磁吸附单元产生的磁吸附力应大于80 N。
1.2 履带链节磁吸附单元结构及原理
Halbach阵列是一种新型永磁排列方式,将永磁铁水平和垂直交替排列,平行磁场和径向磁场叠加使得一侧磁场强度大幅增强而另一侧明显减弱[4-5]。利用这一原理设计出一款适合履带链节安装的带摆杆回转轴的磁吸附单元结构,如图2所示。将由5块永磁铁构成直线型Halbach的阵列,通过转轴安装在链节上,链节下端装有2个麦克纳姆轮辊子且辊子直接与导磁壁面接触,使永磁体与导磁壁面之间具有一定的工作间隙,以保证永磁体旋转时不与导磁壁面碰撞。
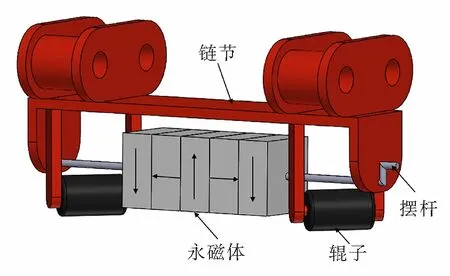
图2 磁吸附单元结构图
图3所示为导轨结构示意图,导轨导槽有直线段、圆弧段和过渡段。当履带转动时,履带链节磁吸附单元中的摆杆沿导轨导槽移动,经过导槽过渡段时,导轨导槽和磁吸附单元的摆杆相互作用会使得磁吸附单元旋转180°。假设麦克纳姆履带爬壁机器人向左方行驶,随着履带的转动,履带链节磁吸附单元经过左侧导槽过渡段时,由于摆杆与导槽的作用磁吸附单元正向旋转180°,履带链节磁吸附单元强磁面面对导磁壁面处于吸附状态,提高了磁场的利用率;当履带链节磁吸附单元经过右侧导槽过渡段时,履带链节磁吸附单元反向旋转180°,此时履带链节磁吸附单元弱磁面面对导磁壁面,磁吸附力很小,履带链节脱离导磁壁面时需要很小的电机扭矩。

图3 导轨结构图
2 磁吸附力数学模型的建立
永磁铁是一种无缘磁介质,它的磁化状态用磁化强度M来表示,大小与矫顽力Hc相等。当磁介质均匀磁化后,有
(1)
式中,Jsm为磁化面电流密度;H为磁场强度;u0为真空磁导率,u0=4π×10-7H/m;n为面电流的外法线方向。
将永磁体产生的磁场简化为二维静态磁场,其麦克韦斯方程为
(2)
式中,H为磁场强度;J为电流密度;B为磁感应强度。
2=-μJ
(3)
式中,μ为相对磁导率。
根据求解域的初始条件和边界条件可得
(4)
式中,Ω为整个有效域;L1为永磁体表面等效束缚面电流存在的界限;L2为不同物质的交界线;L3为场域边界线;n为不同物质交界面的法线方向;μ为材料相对磁导率。

图4 磁场模型
为分析单个履带链节磁吸附单元的磁吸附力,建立履带链节磁吸附单元的磁场分析物理模型,如图4所示,当磁吸附间隙(链节磁吸附单元到导磁壁面之间的距离)δ较小时,将磁吸附间隙δ沿水平方向均分为n份,每份长度的永磁铁产生的磁吸附力为[6]
(5)
式中,Bi为每一等份磁感应强度;Si为每一等份气隙有效受力面积;S为磁吸附单元的底面积;α为磁吸附单元与导磁壁面之间的夹角。
则磁吸附单元对导磁壁面所产生的磁吸附力为
(6)
3 Ansoft Maxwell求解和结果分析
3.1 有限元模型的建立
使用Ansoft Maxwell软件建立履带链节磁吸附单元的磁场有限元结构模型,如图5所示,根据所设计麦克纳姆履带式爬壁机器人的链节磁吸附单元的结构尺寸和辊子参数确定一下参数:磁吸附间隙b=6 mm;永磁铁厚度H=22 mm;永磁体宽度l=10 mm。根据履带链节位置的不同,磁吸附单元有2种状态,当履带链节和导磁工作壁面接触时,链节磁吸附单元的强磁面面对导磁工作表面如图5(a)所示;当履带链节和导磁工作壁面快脱离时,链节磁吸附单元的弱磁面面对导磁工作表面(履带链节磁吸附单元旋转180°),如图5(b)所示。
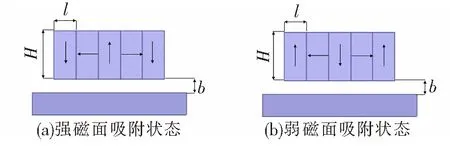
图5 磁场有限元结构模型
3.2 有限元模型求解与结果分析
磁吸附单元中的永磁铁采用稀土永磁材料汝铁硼(NdFeB)系列中的N35,其内禀矫顽力较大而且具有较好的抗老化退磁性能,能够保证磁吸附单元长期稳定地工作,其性能参数如表1所示[7]。

表1 NdFeB-N35永磁材料性能参数
对模型赋予材料属性,其相对磁导率是1.099 778 5,磁吸附间隙空气相对磁导率为1,导磁壁面材料为纯铁,相对磁导率为4 000。
在结构参数相同的条件下,分别对图5中2种状态进行仿真求解,然后进行对比分析。图6(a)、图6(b)分别为2种磁路状态的磁力线分布图。由图6可知,链节磁吸附单元强磁面吸附时磁力线大部分穿过导磁壁面,产生的磁吸附力为88.602 N;磁吸附单元弱磁面吸附时,磁力线极少部分穿过导磁壁面,产生的磁吸附力为5.453 4 N。可以算出,单个链节磁吸附单元最大磁吸附力与最小磁吸附力之比约为16倍;而传统履带式磁吸附爬壁机器人的Halbach阵列磁吸附单元总是强磁面面对导磁工作壁面,履带链节面和脱离导磁工作壁面时的磁吸附力几乎相等,比值约为1。

图6 2种模型对比图
4 磁吸附单元运动分析与仿真
4.1 磁吸附单元运动分析
履带式爬壁机器人运动过程中,随着履带的转动,爬壁机器人前行方向履带后端的磁吸附单元脱离导磁工作壁面时,会产生一个磁力阻力矩,影响爬壁机器人的运动平稳性和功耗的多少。麦克纳姆履带式爬壁机器人的履带链节磁吸附单元在脱离导磁工作壁面前,通过导轨导槽和摆杆的作用,使得磁吸附单元绕自身轴线转过180°,弱磁面面对导磁工作壁面,大大降低磁力阻力矩,有利于爬壁机器人运动平稳和降低功耗;而传统履带式磁吸附爬壁机器人Halbach阵列磁吸附单元总是强磁面面对导磁工作壁面,磁吸附单元脱离导磁工作壁面时,磁力阻力矩几乎不会减小,从而影响爬壁机器人的运动平稳性并且功耗还高。
随着履带的转动,在磁吸附单元脱离导磁工作壁面过程中,磁吸附单元与导磁工作壁面之间的夹角α也在不断从0°开始增大。图7绘制了α取6种不同角度值的情况,便于磁吸附力的计算与仿真。

图7 磁吸附单元运动模型
利用Ansoft Maxwell仿真计算可得传统履带式Halbach磁吸附单元和麦克纳姆履带式Halbach磁吸附单元在不同α角条件下对导磁壁面产生的磁吸附力,结果如表2所示。
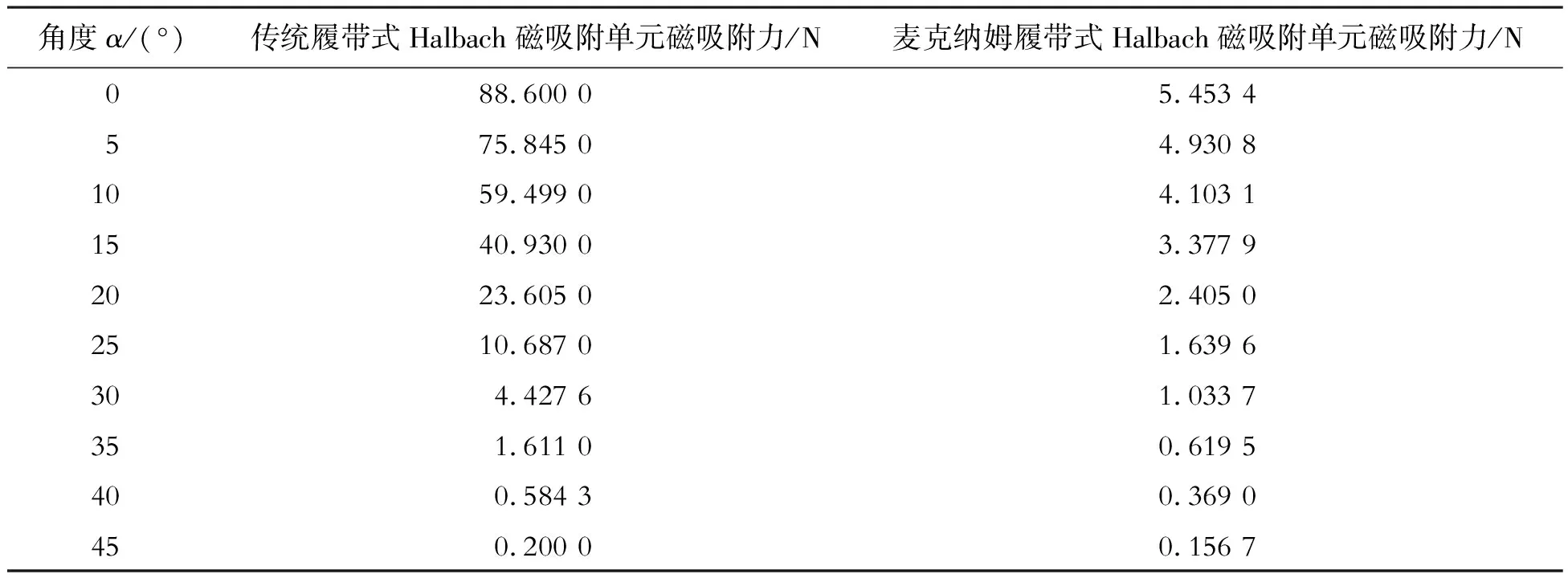
表2 2种磁吸附单元磁吸附力对比
4.2 磁吸附单元运动仿真
利用动力学仿真软件ADAMS对磁吸附单元脱离导磁壁面过程进行仿真。将磁吸附单元简化为1个长方体,在长方体上方125 mm(履带链轮回转中心高度)处建立1个转动副,磁吸附单元绕其旋转,仿真模型如图8所示。在磁吸附单元质心处添加1个竖直向下的力,由于磁吸附力是随转角非线性变化的,所以采用SPLINE函数定义力。将表2中传统履带式Halbach磁吸附单元产生的磁吸附力数据导入ADAMS中创建SPLINE_1函数,将麦克纳姆履带式Halbach磁吸附单元产生的磁吸附力数据导入创建SPLINE_2,使用SPLINE_1和SPLINE_2函数分别对力进行修改。在转动副上添加1个驱动模拟爬壁机器人的驱动,电机速度为76 d/s,仿真时间设定为0.6 s,仿真步长设定为0.01,然后进行磁吸附单元的运动仿真。
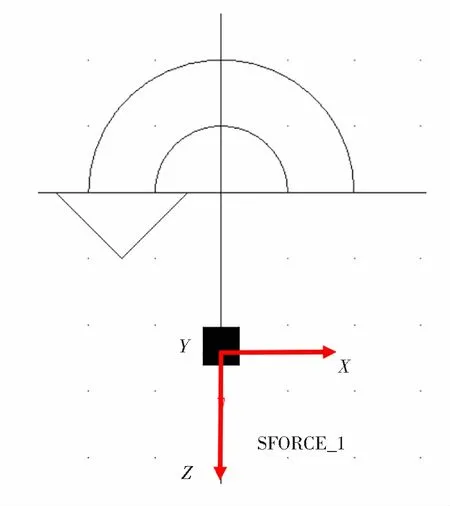
图8 磁吸附单元运动仿真模型
如图9所示,传统履带式Halbach磁吸附单元对导磁壁面所产生的最大吸附力为88.6 N,当其随着链轮转动远离导磁壁面时,对导磁壁面产生的磁吸附力逐渐减小;麦克纳姆履带式Halbach磁吸附单元脱离导磁壁面时,对导磁壁面产生的最大磁吸附力为5.4 N,脱离导磁壁面过程中磁吸附力变化很小。麦克纳姆履带式Halbach磁吸附单元比传统履带式Halbach磁吸附单元在脱离导磁壁面产生的磁吸力更小,因此磁力阻力矩也相对更小些,使得履带链节更容易脱离导磁壁面。图10所示为2种磁吸附单元脱离导磁壁面过程中驱动电机扭矩变化曲线图,可以看出,传统履带式Halbach磁吸附单元在脱离导磁壁面时扭矩变化较大,最大的扭矩为1 250 N·mm;而麦克纳姆履带式Halbach磁吸附单元扭矩变化曲线趋近于1条直线,扭矩变化平稳,最大扭矩98 N·mm,因此麦克纳姆履带式Halbach磁吸附单元在脱离导磁壁面时所需要的驱动电机扭矩更小,比传统Halbach磁吸附单元运动更平稳。图11所示为2种磁吸附单元脱离导磁壁面过程中的功耗曲线,从图11可以看出,从0~0.18 s,2种磁吸附单元的功耗都在逐渐增大,从0.18~0.6 s,2种磁吸附单元的功耗都在逐渐降低,但是传统履带式Halbach磁吸附单元的最大功耗为1 600 (N·mm)/s,而麦克纳姆履带式Halbach磁吸附单元的最大功耗只有100 (N·mm)/s。可见,在履带链节脱离导磁壁面过程中,麦克纳姆履带式Halbach磁吸附单元的功耗更小。

图9 2种磁吸附单元磁吸附力变化曲线图

图10 2种磁吸附单元驱动电机扭矩曲线图
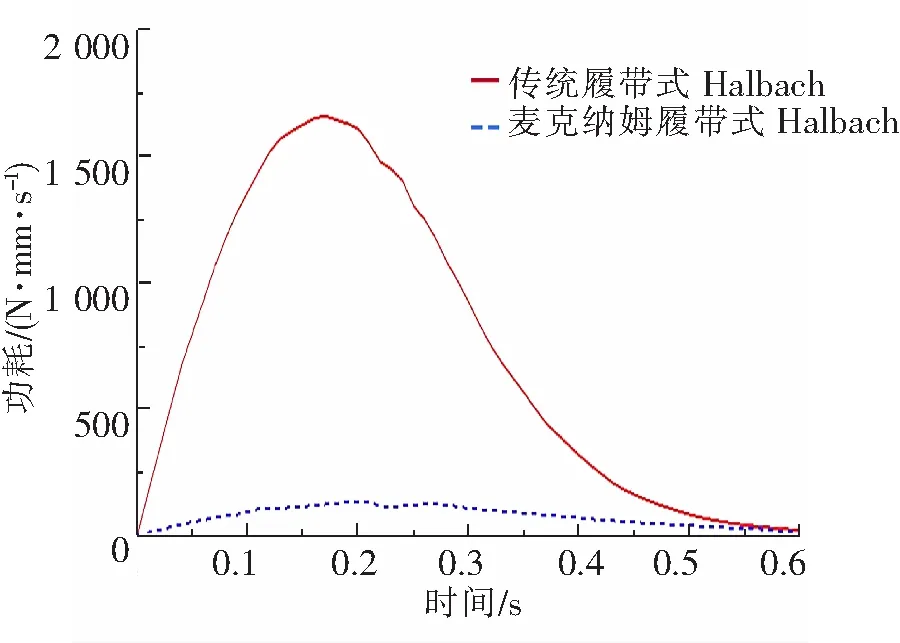
图11 2种磁吸附单元驱动电机功耗曲线图
5 结论
(1)结合麦克纳姆轮的运动灵活性、履带爬壁机器人的强负载能力和永磁铁Halbach阵列磁场强度的分布,提出麦克纳姆履带式爬壁机器人的结构并着重对履带链节磁吸附单元进行分析。
(2)采用有限元法对麦克纳姆履带式爬壁机器人的履带链节磁吸附单元磁吸附力建模并计算。计算结果表明,在履带链节脱离导磁工作壁面过程中,麦克纳姆履带式Halbach磁吸附单元的磁力阻力矩很小,便于提高爬壁机器人的运动平稳性。
(3)运用ADAMS软件分别对麦克纳姆履带式Halbach磁吸附单元和传统履带式Halbach磁吸附单元脱离导磁壁面过程进行运动仿真,仿真结果验证了麦克纳姆履带式Halbach磁吸附单元运动更加平稳、灵活性更高、耗能更少。
