助老轮履协同轮椅设计
2022-06-23张慧云
张慧云,杨 强,李 航
(成都工业学院 智能制造学院,成都 610031)
当今社会,行走困难的老年人很多。失去行走能力的老年人,给个人和家庭甚至国家医疗系统和社会保障体系造成沉重的负担和巨大的压力。解决老年人行走困难的问题已引起社会各界的重视。
目前有一些行走机构应用在各行各业中。这些行走机构的相同之处是在平地时用轮子行走,路面环境较差时用履带行走。轮式行走机构的优点是结构简单、体积小、行走灵活,但与地面接触面积小,当爬坡或路面环境差时,容易打滑,遇到复杂障碍不能翻越。履带行走机构与路面的接触面积大,行走时不易打滑,能够在复杂环境下行走,其缺点是灵敏度较差,功率消耗较大[1]。把轮式行走和履带行走结合以来,并实现两者的灵活转换,是目前行走机构的研究方向。贾海东等[2]开发了一种轮履复合巡检机器人行走机构,可以代替人力在井下进行巡检,路面情况好的时候用轮式行走,当路面状况较差的时候用履带行走,不仅减少了人力,还排除了安全隐患。王腾等[3]对轮履复合移动平台连杆切换机构进行设计分析,发现连杆机构能够很好地进行轮式行走和履带行走之间的切换,设计出的移动平台应用在城市废墟搜集和工程探险等复杂的环境。曹鹏彬等[4]设计了助老助残轮履协同移动平台,用平面四杆机构进行轮式行走和履带行走之间的切换,并对移动平台的爬楼性能进行运动分析,能实现安全爬楼。
目前常用的轮履协同行走机构有四履带双摆臂、六履带四摆臂等[5],这些行走机构及其轮履切换结构复杂,所需驱动电机个数多,不适用于轮椅。本文设计的助老轮履协同轮椅结构简单,所需电机只有1个,轮履切换利用汽车翻斗原理,结构简单,能解决老年人行走困难的问题。
1 整体结构及传动布局
1.1 整体结构
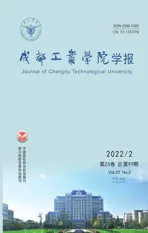
轮履协同轮椅的整体结构如图1所示,轮椅为3轮,前车轮为转向轮,后2个车轮,其中1个是主动轮,由电机直接驱动,另1个为从动轮。
1—履带行走机构; 2—驱动轮;3—从动轮;4—离合器; 5—转向轮;6—轮履转换操纵机构; 7—链传动。图1 轮履协同轮椅整体结构
这种3轮结构可以灵活地转向,实现较复杂的行走轨迹[6]。如果老人上车不便,可将转向轮上的方向盘拆下。在平地时,两轮和地面接触,实现轮式行走。当遇到爬楼时,先把转向轮部件拆下,液压缸驱动四杆机构变形,让履带和地面接触,实现履带攀爬楼梯。根据老年人攀爬楼梯的需求,履带行走采用双履带,并且履带的从动轮可以抬起一定的高度,形成前攻角,帮助进行爬楼。考虑到老人乘坐的舒适性,履带采用减震性很好的橡胶履带。履带驱动采用履带齿与驱动齿轮内啮合的形式驱动。
1.2 传动布局
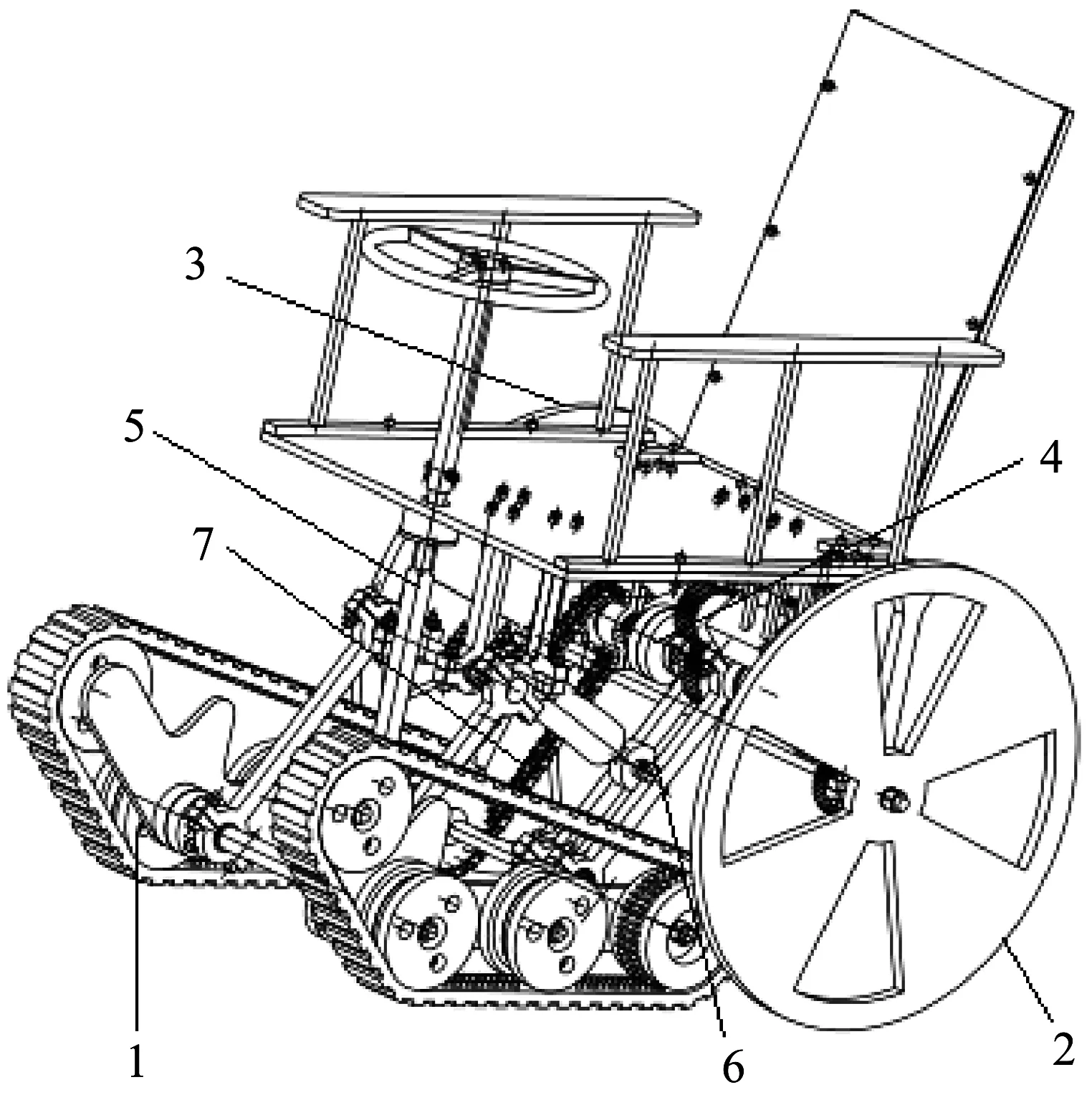
轮履协同轮椅的动力系统大大简化,整个动力系统只有1个直流伺服电机。轮式行走机构和履带行走机构之间动力的切换采用摩擦离合器,方便实现动力的接通和断开。2个摩擦离合器对称分布在输出轴的两端,用液压缸推动操纵杆实现两边离合器的接通和断开,从而实现轮子和履带间的动力转换,如图2所示。直流伺服电机输出动力时,操纵杆向左推动,履带链传动一端的摩擦离合器的从动件和主动件接合,从而传递电机的扭矩,通过链传动,驱动履带行走机构运动,实现履带行走。当需要轮式行走时,操纵杆向右推动,使轮式输出轴一端的摩擦离合器的从动件与主动件结合,驱动轮式行走机构的主动轮运动。
1—直流伺服电机;2—液压执行元件;3—摩擦离合器主动件;4—摩擦离合器从动件;5—轮式输出轴齿轮; 6—履带输出链传动;7—换向架推杆。图2 传动布局
2 轮履转换机构设计原理
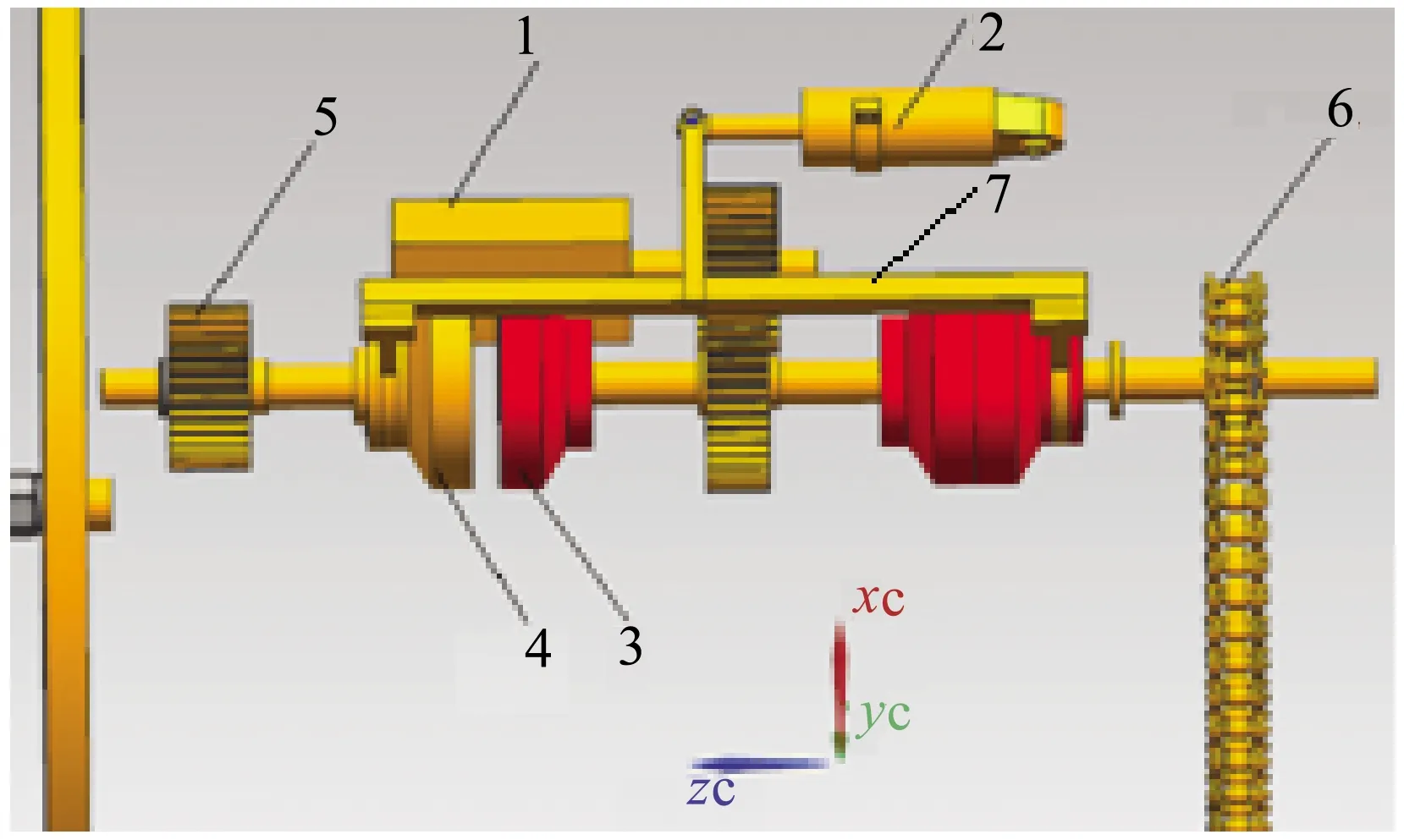
目前学者设计出的对轮履转换装置,有的用丝杠配合舵机转换,有的使用多杆机构进行转换,都比较复杂[1-4]。大型运输自卸货车的车斗升降结构原理是将液压元件的一端通过铰链的方式固定在车体上,该端可以绕固定点旋转,而另一端连接在车斗上,该链接端上液压元件也能绕固定点旋转,而车斗的固定端则通过铰链的方式固定在车体上,从而实现货物的卸载,如图3所示。自卸车斗的原理可以应用在轮履转换装置中。
图3 自卸车斗工作原理
在轮履转换机构方案设计时,可以结合平面四杆机构的变形原理,实现轮式行走和履带行走之间的切换。主要就是履带行走机构的上下运动,从而实现履带传动机构的接地与脱离。
轮履转换四边形机构,如图4所示,当液压缸推杆伸出时,履带后支撑杆向右摆动,履带连接板和地面接触,两轮离开地面,实现履带行走;当液压缸推杆收缩时,履带后支撑杆向左摆动,履带离开地面,两轮和地面接触,实现轮式行走。
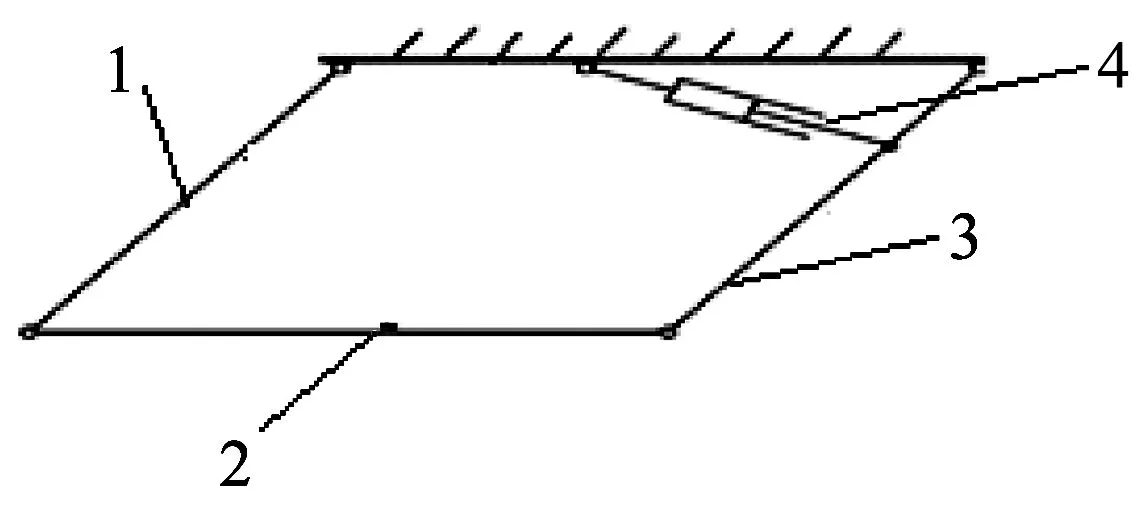
1—履带前支撑杆; 2—履带连接板; 3—履带后支撑杆; 4—操纵液压缸。图4 轮履切换四边形机构示意图
3 转向轮部件设计
本文设计的轮椅采用手动转向的方式,如图5所示,该转向结构除轮子之外主要由方向盘、过渡杆、前轮支撑杆3部分组成。但由于转向机构位于轮椅的中间,有的老人上下轮椅受到一定的阻碍,因此在转向机构中设计了过渡杆,过渡杆和方向盘之间用螺栓连接,方便对转向机构进行拆卸。为避免爬楼时前轮和楼梯发生干涉,可以先调整好方向,取下前轮后,再进行攀爬。
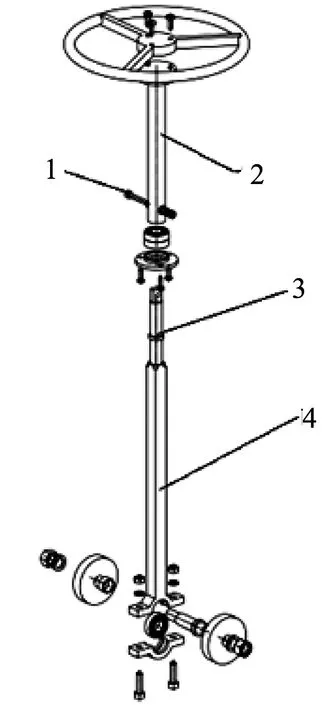
1—螺栓;2—方向盘;3—过渡杆;4—前轮支撑杆。图5 转向轮部件