基于无线自组网络的车位检测系统设计
2022-06-23边玉亮王秀友余世干
边玉亮,刘 辉,王秀友,余世干
(阜阳师范大学 信息工程学院,安徽 阜阳 236041)
随着社会经济水平的提高,汽车保有量也在飞速增长,置身于大型停车场之中,如何快速掌握停车场中空闲车位数量及具体位置[1-3],提高停车效率避免拥堵成为我们首要解决的问题。现有的停车场泊车引导系统主要由车位检测传感器和通信线路组成,其中,通信线路分成有线和无线两种方式[4]。有线通信通常采用CAN总线或者RS485总线进行数据传输,数据传输可靠,但是线路布置复杂,成本较高。无线通信方式主要采用NB-IoT或者ZigBee等技术进行数据传递,虽然避免了物理布线,但是这两种方法都有一个共同的特点,就是要将所有节点的数据都汇聚到网络中心,各个节点没有自主控制和显示功能。车主在停车时往往只能在停车场的某一处查看空闲车位情况,车主进入停车场还是要无序流动式的查找车位[5],对于大型的停车场这样并不能很好地解决停车场空闲车位实时查询以及避免拥堵的问题。
针对以上问题本文提出了一种基于无线自主网络的大型停车场空闲车位检测方法。该方法使用无线自组网络技术对大型停车场进行分区智能管理,实现车主在各个分区都能实时查看所有分区车位的空闲数量、方向和编号的目的。旨在设计一套实用性更强、效率更高的智能停车场引导系统,缩短停车时间,避免停车场内出现交通拥堵,提高停车场的停车效率。
1 系统设计原理
现有的大型停车场车位检测存在两个方面问题。一是采用有线方式进行组网,由于大型停车场车位较多,每个车位都要单独检测,使得线路连接十分庞大。二是系统仅在进入停车场时只提示空闲车位的多少,不提供具体的空闲车位位置,车主进入停车场后车主需要自行查找[6,7],即使有的系统能够按照车位是否空闲在车位的上方设置提示灯,但这种方式也仅仅适用于车主视力范围内的车位查找,并不能彻底地解决问题,车主开着车在空间本就不宽裕的停车场寻找车位会进一步加重拥堵。
为了解决以上问题设计了基于无线自组网络的大型停车场空闲车位检测系统,该系统主要思想是将大型停车场的车位进行分区,分区大小可依据目测范围内车位方便观察设定。在每个分区内部安置一个无线节点模块,各个节点模块既是主模块又是从模块,无线模块采用自组网技术,模块上电即可加入到无线网络中,模块可以将本分区所有的车位状态发送给其余模块,同时可以接收其余模块发送过来的其他分区的车位使用情况。同时,每个分区放置一个电子显示引导牌用来显示所有分区车位使用情况和分区方位,这样可以使车主不管处于哪一个分区,都可以对整个停车场的车位使用情况做到心中有数,方便车主快速有效地定位到空闲车位,提高停车效率。使用无线自组网络实现分区之间的网络通信可以大大减少布线,降低系统安装难度和成本。实际安装时可根据需要增加或减少节点数量,以及每个节点内的车位数量,具体车位编号可以参考A01,A02,A03,B01……的编号方式进行编号。
2 系统硬件设计
2.1 无线自主网络搭建
由于大型停车场内部需要监测的车位较多,如果各监测传感器采用有线方式布置,所需的线路会变得十分复杂,增加布置难度和成本。因此系统采用无线自组网络方式代替有线网络方式,结合实际无线通信距离和信号传输的要求,系统最终选择DL-LN33P无线自组网模块。该模块上电自动组网,单跳能够达到300米,模块工作时,会与周围模块自动组成一个无线多跳网络。此网络为对等网络,不需要中心节点,模块使用定向扩散协议寻找路由,每个节点平均可记录190个目标节点的路由,在网络建立后传输速度和延迟可达到最优。微控制器只需告诉模块目标地址和待发送的数据,模块会通过网络选择最优的路径,将信息传输给目标模块,而且模块能通过UART输出源地址和上述的数据,节点模块通信网络拓扑示意图如图1所示。
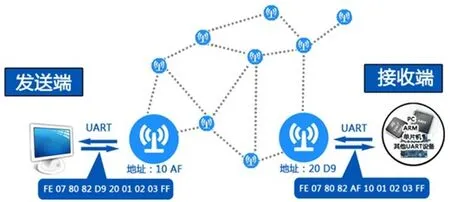
图1 节点模块通信网络拓扑示意图
每个节点模块在系统中的地位相同,可以和其他所有模块之间进行通信,每个模块都可以实时实现显示所有分区空闲车位情况,引导车主快速定位停车。整个系统采用各节点模块化设计方法,模块包括:1.车位状态监测传感器,2.无线自组网络收发模块,3.引导显示板,4.控制器以及电源和其他工艺设计部分。各个节点模块结构原理框图如图2所示。
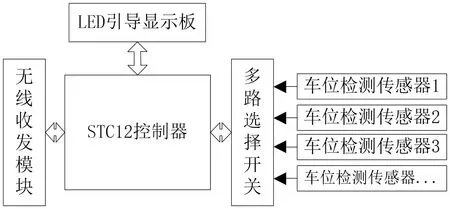
图2 节点模块结构原理框图
本系统设计的各节点参数配置信息如表1所示。也可以根据实际需要增加节点,同一网络可容纳190个结点,但要求需要通信的节点之间要处于相同的网络和信道。

表1 系统各节点模块的基本信息
2.2 LED引导显示器设计
引导显示器的主要功能就是能够接收控制器的信号,显示相应的剩余车位信息,根据其他分区与本分区的相对位置,使用相应箭头提醒车主其他节点区域的大致方向。系统设计要求每个节点区域都至少安放一个引导显示牌,使得车主不管在哪个区域都能够查看停车场所有节点区域的空闲车位数量以及相应区域的大致方向。引导显示器的外观设计参考图3所示,其中☆代表当前处于A区,前面的数字16代表剩余车位数量,括号后面的循环显示的数字01,02……代表空闲车位的编号。

图3 引导显示器的外观设计示意图
2.3 车位检测
目前,针对停车场车位检测主要使用的方法有视频检测技术、地感线圈检测技术、超声波检测技术和红外检测技术3种。但是视频检测存在成本高、视频图像提取检测精度不稳定等缺点,地感线圈检测方法使用简单、检测准确、灵敏度高,但后期车位的修改变动和调整比较麻烦。目前常用的检测方法是超声波和红外检测两种,这是由于红外光电传感器使用方便,准确率高,易于搭建成数量较多的传感器网络。因此本设计选择红外检测传感器作为车位探测器,在每个车位上方安装一个红外光电传感器,并将一个节点区域的所有传感器都连接到节点模块上。
2.4 控制器选型
本系统采用宏晶STC12C5A60S2系列单片机作为各节点模块的控制器,该型号单片机速度比普通51系列单片机快6-12倍,具有空闲和掉电模式,非常适合无线传感器网络中节点模块的低功耗设计需求。芯片还集成了8通道10位ADC用于处理模拟信号以及SPI高速同步串行通信接口。芯片内部具有两个串行通信接口,方便和DL-LN33P无线通信模块之间通信,本系统选择单片机串口2即RXD2和TXD2两个引脚和DL-LN33P进行串口通信,接收其他节点的数据并向其他节点发送本节点的车位状态数据。系统使用SN74HC151N作为多路开关用以在每个节点中接入更多的传感器,扩展控制器的IO口,并且使用LCD显示屏作为显示引导牌。根据以上设计节点模块主要电路原理图如图4所示。
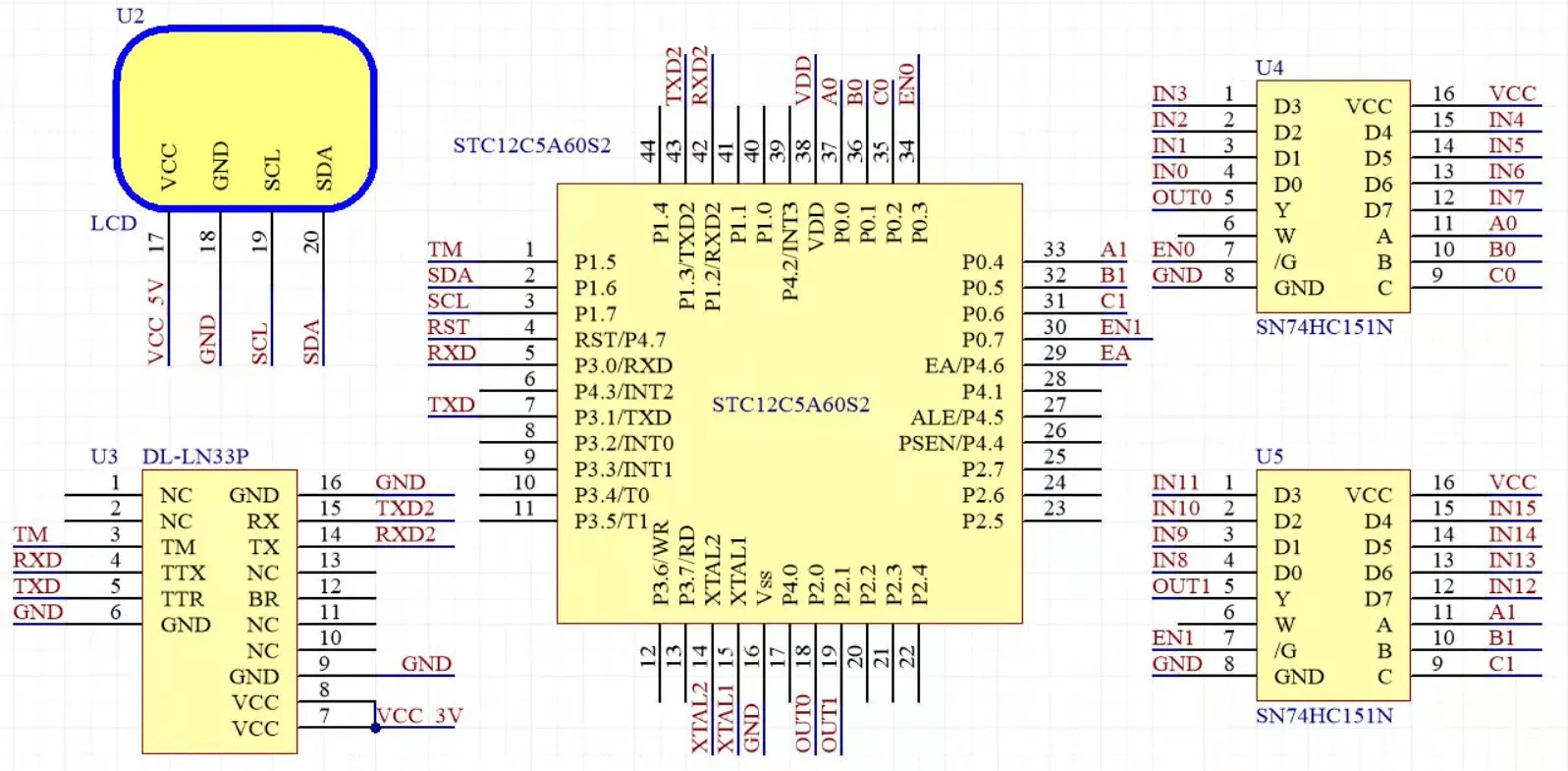
图4 节点模块主要电路原理图
3 软件设计
根据系统设计内容要求,由于在该无线传感器网络中,各个节点模块处于相同地位,组网设计由DL-LN33P无线传感器模块实现。在这里只需要设计各个节点模块的应用程序即可,节点模块程序主要包括两个方面内容,一是传感器数据采集,经过分析计算后进行转发。首先,依次控制多路开关将各个多路开关接收到的空闲车位数进行累加,同时记录空闲车位的编号;然后,将数据按照数据包格式要求进行打包;最后,依次修改目标节点地址,将数据发送给网络中的所有节点。二是接收其他节点数据进行分析显示。由于其他模块发来的数据时间不固定,因此,节点模块程序对数据接收采用串口2的中断接收方式,每接收一帧数据后将数据中源地址和数据分析提取出来。最后将各节点的空闲车位数量及车位编号进行显示。
4 实验验证
根据系统设计要求搭建了相应的无线自组网络进行实验验证,在能够验证设计内容的前提下,系统使用编号为节点A、节点B和节点C的三个节点进行实验。实验时要求任意一个节点都可以同时接受其余两个节点发送过来的数据,同时将本节点数据发送给其余两个节点。任意一个节点发送的数据以数据包的形式进行发送和转发,节点A发送数据的数据包格式如下:FE 06 A0 A0 1F 00 XX XX FF FE 06 A0 A0 1E 00 XX XX FF;节点B发送数据的数据包格式如下:FE 06 A0 A0 1F 00 XX XX FF FE 06 A0 A0 1D 00 XX XX FF;节点C发送数据的数据包格式如下:FE 06 A0 A0 1D 00 XX XX FF FE 06 A0 A0 1E 00 XX XX FF;其中:XX XX代表要发送的数据,表示发送方分区内空闲车位的数量和编号。0x1F 0x00、0x1E 0x00、0x1D 0x00代表系统中三个节点的地址。系统模拟实物运行图示如图5所示。

图5 节点模块通讯实验实物图(三个节点)
系统为每一个节点预留了16个车位,其中A区有两个车位A01,A02被占用,B区和C区的A01被占用。通过模拟实验结果可以看到,每个节点都能够接收到其他节点发送过来的车位检测结果并实时显示。实际在停车场布置时,可以实现车主在任意节点区域,都可以实时查看停车场中所有节点空闲车位数量、编号和方向的目的,大大提高了停车场使用效率。
5 结论
针对在大型停车场中,传统泊车引导系统线路铺设成本高、引导效率低下等问题,提出了基于无线自组网络实现大型停车场分区管理的方法,并设计了相应的检测系统。通过实验表明,该系统能够实现对大型停车场进行分区管理,车主在各个分区都能实时查看所有分区车位的空闲数量、方向和编号的目的,提高了空闲车位定位效果,缩短停车时间,对大型停车场的智能化设计和改造具有重要参考价值。
