舰艇统一姿态基准构建方法
2022-06-23秦石乔农立发
吴 伟,秦石乔,农立发
(国防科技大学前沿交叉学科学院,长沙 410073)
0 引言
大型舰艇上集成了雷达、光电跟踪、导弹等诸多装备,在协同探测、态势共享和联合作战时需要高精度时间和空间信息保障。统一时空基准是将分布在舰艇上的时间管理设备和导航设备通过高速网络互联和信息融合,形成一致的时间、位置和姿态参考。随着卫星导航系统和高精度原子钟的普遍应用,时间和位置统一问题已得到较好解决。由于舰艇不是一个刚性体,在平台运动、温度变化、结构老化及武器发射等作用下将产生角形变。D.L. Day等测量结果表明,舰船在一天内由于日照引起的角形变达0.9mrad,由转弯机动产生的角形变可达12.3mrad。角形变导致共平台上各设备之间的坐标系不一致,难以实现姿态基准统一。
目前有两种技术途径可以克服舰艇形变的影响:一是独立式局部基准,二是形变测量和补偿。独立式局部基准采用中低精度的惯性器件,利用传递对准方法完成初始对准,通过导航解算输出本地姿态信息,其精度受惯性器件性能、主惯导基准的工作状态、舰艇航行条件等影响较大。此外,局部基准通常由各武器厂家自行配置,缺乏统一标准,导致种类繁多、信息互通难、精度参差不齐等问题。随着对姿态保障精度要求的不断提高以及用户装备的增多,通过不断提高惯性器件的性能和增加局部基准数量已难以满足发展需求。形变测量方法通过直接测量和补偿角形变,使舰艇上各设备的坐标系达到一致。各国学者提出了包括光学自准直法、GPS位置矢量法、光纤应力测量法、摄像测量法和惯性矢量匹配法等形变测量方法,并进行了深入的理论研究和实验验证。其中,惯性矢量匹配形变测量法以两套惯性测量单元(Inertial Measurement Unit, IMU)的角速度和比力矢量为观测量,通过Kalman滤波估计得到形变结果,具有自主性强、布置灵活、精度高等优势,得到了广泛关注。
本文提出了一种适用于舰艇的统一姿态基准构建方案。首先介绍了惯性矢量匹配形变测量原理,在此基础上提出了统一姿态基准构建方案,并对统一姿态基准的体系结构、功能特性和关键技术进行了阐述。最后对惯性矢量匹配形变测量方法的特性进行了分析和评估,并对统一姿态基准的发展进行了展望。
1 惯性矢量匹配形变测量原理

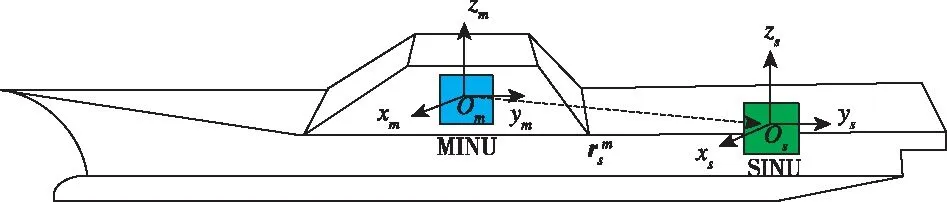
图1 惯性矢量匹配形变测量系统示意图
假设MINU和SINU之间的形变角为。根据形变角的时间周期不同,分为静态形变角和动态形变角,表示为
=+
(1)
式中,为静态形变角;为动态形变角。


(2)
比力匹配测量方程如下


(3)
惯性矢量匹配测量方程是一个多解方程,需要引入船体动态形变模型来估计形变。由于船体结构复杂,所受的波浪载荷是随机的,导致动态形变也是随机的,通常采用统计模型描述动态形变。最常用的动态形变模型为二阶高斯-马尔可夫过程模型,可表示为

(4)
式中,=,,;为阻尼系数;为支配频率;为动态形变幅度均方根值;()为零均值高斯白噪声。当海况变化或舰艇运动状态变化,模型参数也将改变。可将动态形变模型视为一个宽平稳随机过程,利用动态形变历史计算数据对模型参数进行在线辨识。
在惯性矢量匹配测量方法中,角速度+比力匹配测量方法估计结果最为稳定,是目前最常用的形变测量方法。角速度+比力匹配测量Kalman滤波方程的状态向量为
=

(5)
Kalman滤波量测方程为
=+
(6)
式中,为量测误差,量测值为

(7)
量测矩阵为

(8)
式中,表示3×3的单位对角矩阵;表示3×3的零矩阵。
惯性矢量匹配形变方法可利用分布在舰艇上的惯性测量设备进行形变测量,具有自主性强、布置灵活、精度高等优势,但也存在动态形变模型建模难、测量方程存在固有耦合误差等问题。随着这些问题的解决,惯性矢量匹配形变测量方法逐步走向工程应用,为实现舰艇统一姿态基准奠定了基础。
2 统一姿态基准构建方法
为克服角形变的影响,各国海军舰艇通常采用主惯导和独立式局部基准的姿态信息保障模式。主惯导一般采用高性能的惯性器件,并且通过旋转调制、多源导航信息辅助等手段抑制惯性器件误差,提高姿态精度和姿态精度的长时间保持能力。局部基准同样采用惯性导航解算,受成本、体积和工作环境等限制,其精度往往比主惯导低得多。这种分散独立的姿态基准体系结构,无法充分发挥主惯导的高精度优势,造成极大的资源浪费,并带来诸多使用限制。为解决此问题,给出了一种基于惯性矢量形变测量的统一姿态基准体系架构,并分析了其功能特性、实现途径和关键技术。
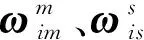
2.1 统一姿态基准原理
统一姿态基准原理如图2所示。对主惯导基准MINU与各独立局部基准SINU(=1,2,…,)分别进行形变测量,再将主惯导基准的姿态值补偿形变后传递到各独立局部基准。形变解算过程只用到主惯导基准和局部基准的陀螺和加速度计的原始测量数据,对主惯导基准的工作状态、舰艇航行状态无特殊要求。
图2 统一姿态基准原理图
在统一姿态基准体系中,任意一套局部基准的工作原理如图3所示。这种局部基准有两种工作模式:一是形变解算模式,将主惯导基准的姿态信息经过形变补偿,传递到用户设备;二是自主导航模式,由局部基准内部的导航解算单元在完成初始对准后,进行自主导航解算,输出姿态信息。局部基准主要工作在形变解算模式下,只有当主惯导基准工作状态异常或发送数据中断时,才启用自主导航工作模式。其中,形变解算模式的工作流程如下:
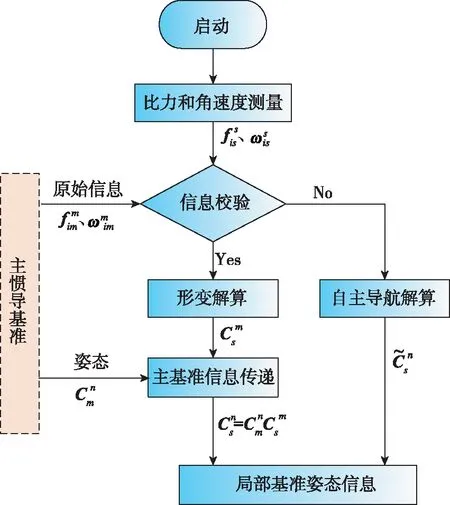
图3 局部基准工作流程图




(9)

利用主惯导基准和局部基准的角速度和比力原始测量信息,实时解算得到形变,再对主惯导基准输出的姿态进行形变补偿,就可以获得局部基准的实时姿态结果。从式(9)可以看出,局部基准的姿态精度由主惯导基准的绝对姿态精度和形变测量误差共同决定。从后面的仿真结果可以看出,形变测量误差很小,可以实现主惯导基准姿态的高精度传递,从而构建以主惯导基准为中心的高精度统一姿态基准体系。
2.2 统一姿态基准体系结构
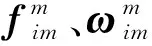
统一姿态基准将分布在舰艇各部位的局部基准测量信息,经过时间同步和形变补偿,实现信息时空配准,在此基础上对信息进行深度融合,以提高导航信息的质量和可靠性。统一姿态基准体系结构,如图4所示,分为信息传感层、信息融合层和信息服务层。信息传感层由分布在舰艇上的主惯导基准和局部基准组成,实时测量得到平台运动的角速度和比力信息,以及主惯导的姿态信息;信息融合层接收各传感器数据,通过数据处理实现形变测量、信息融合、性能评估和故障修复等功能;信息服务层面向用户设备,将融合后的主惯导姿态基准信息经过形变补偿,传递至各用户设备,实现姿态基准信息的统一保障。与传统的独立局部基准相比,统一姿态基准具有如下几方面的优势:
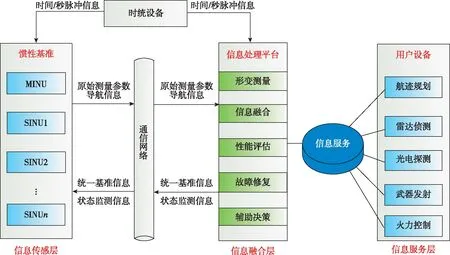
图4 统一姿态基准体系结构
1)信息共享。通过形变测量将所有惯性基准设备融合为一个有机整体,实现信息的融合与共享。
2)精度提升。将主惯导基准的高精度姿态信息通过形变测量和补偿传递至用户设备,将各用户设备的姿态基准精度提升至与主惯导基准相当的水平。
3)可靠性提高。通过对舰艇平台的形变模型建模,实现对舰艇关键部位的姿态预测,当局部基准信息不可用条件下提供应急姿态信息服务,提高整个导航系统的冗余性和可靠性。
4)状态实时监测。通过形变测量和补偿,并利用多套惯性基准信息,对其中任意一套局部基准的姿态信息进行实时评估,实现状态监测。
5)保障能力提高。局部基准采用标准化物理接口和信息接口设计,实现惯性基准的相互备份,提高保障能力。
统一姿态基准体系结构充分发挥系统的信息集成和高速计算优势,实现导航信息的集中处理,提升导航信息的服务保障能力。
2.3 关键技术
独立式基准结构的特点是基准设备由用户设备自行配置,种类繁多,形制各异。根据采用的惯性器件不同,有液浮陀螺姿态基准、挠性陀螺姿态基准、激光陀螺姿态基准和光纤陀螺姿态基准;根据是否采用旋转调制机构,有双轴旋转姿态基准、单轴旋转姿态基准和捷联姿态基准。为实现姿态基准统一,需解决以下几个关键技术:
1)高精度形变测量。高精度形变测量是实现姿态基准统一的基础,通过舰艇角形变模型建模、惯性器件误差建模等,可以提高形变的测量精度以及在各种工况条件下的测量结果的鲁棒性。
2)高精度时间同步。在动态条件下,原始数据采样滤波延迟、信息传输延迟和信息处理延迟等都将引起最终的姿态信息融合误差。可通过对惯性基准统一授时,以及对时间延时进行实时估计和补偿等,减小时间延迟对姿态精度的影响。
3)惯性基准信息接口标准化。为实现高精度形变测量和姿态基准统一,各惯性基准发送的原始陀螺和加速度计测量数据,需经过旋转调制补偿、误差校正和坐标系转换等处理,输出满足信息接口标准要求的原始测量参数。
3 仿真实验验证
舰艇统一姿态基准的基础是高精度形变测量,下面通过一组典型仿真实验,验证统一姿态基准的性能。基于某船海上实测的姿态数据(图5所示)、速度数据(图6所示)以及形变数据(图7所示)构建
图5 姿态数据
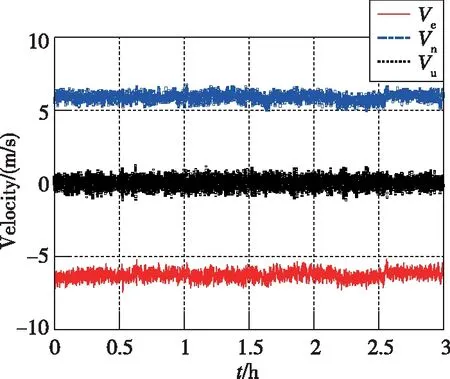
图6 速度数据
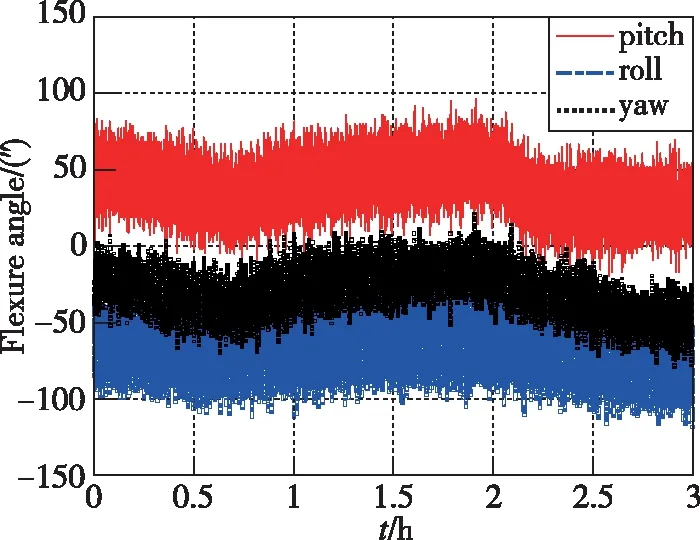
图7 形变角数据
仿真环境,产生MINU和SINU的陀螺和加速度计数据,利用惯性矢量匹配方法计算形变。在仿真中,MINU的惯性器件误差设置为高精度惯性基准水平,SINU的惯性器件误差设置为中等精度惯性基准水平,陀螺和加速度计误差设置如表1所示。
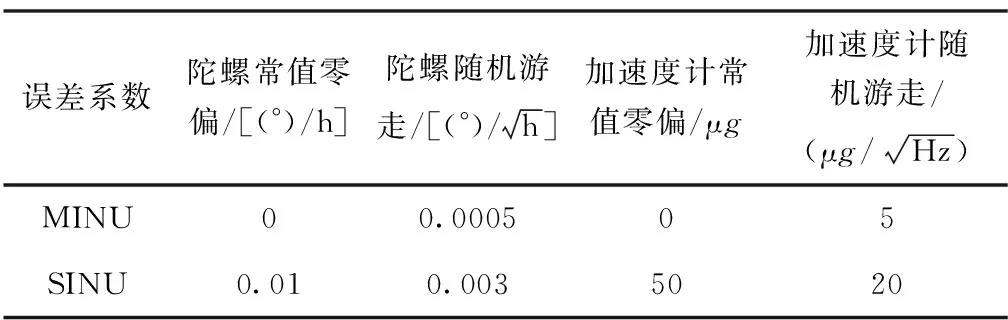
表1 陀螺和加速度计误差参数
利用角速度+比力匹配方法进行形变解算。图8所示为惯性矢量匹配形变测量误差,滤波时间0.5h后纵挠角、横扭角和艏挠角形变测量误差均小于15″。从仿真结果可见,形变测量误差收敛时间快,且测量误差不随时间发散。
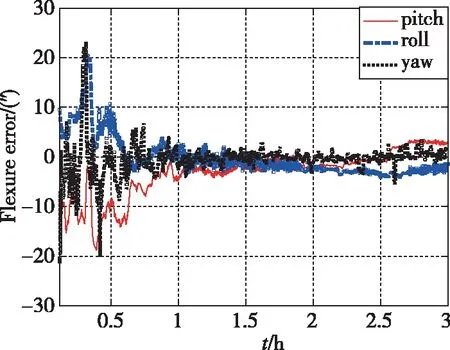
图8 形变测量误差
下面分析惯性器件常值零偏误差对船体形变测量精度的影响。仿真条件设置为:2套IMU陀螺和加速度计随机误差参数与表1相同,MINU的陀螺和加速度计常值零偏均设置为0;SINU的陀螺和加速度计常值零偏分别设置如下:
1)SINU的加速度计零偏设置为0,陀螺零偏变化范围为0~0.1(°)/h。利用惯性矢量匹配方法进行形变解算,统计得到0.5~3h形变测量误差的均值和均方根值随陀螺零偏变化曲线,如图9所示。从结果可以看出,形变测量结果不受陀螺常值零偏的影响。
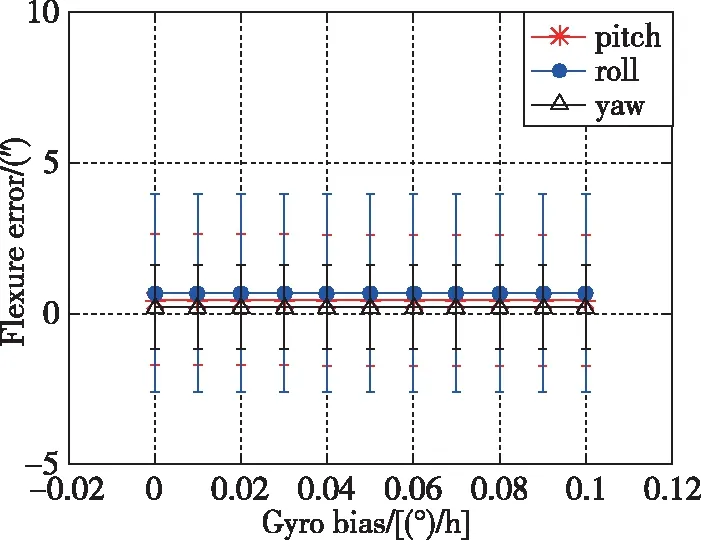
图9 陀螺零偏对形变测量误差的影响曲线
2)SINU的陀螺零偏设置为0,加速度计零偏变化范围设置为0~1000μ。利用惯性矢量匹配方法进行形变解算,统计得到0.5~3h形变测量误差的均值和均方根值随加速度计零偏变化曲线,如图10所示。从结果可以看出,形变测量结果不受加速度计常值零偏的影响。
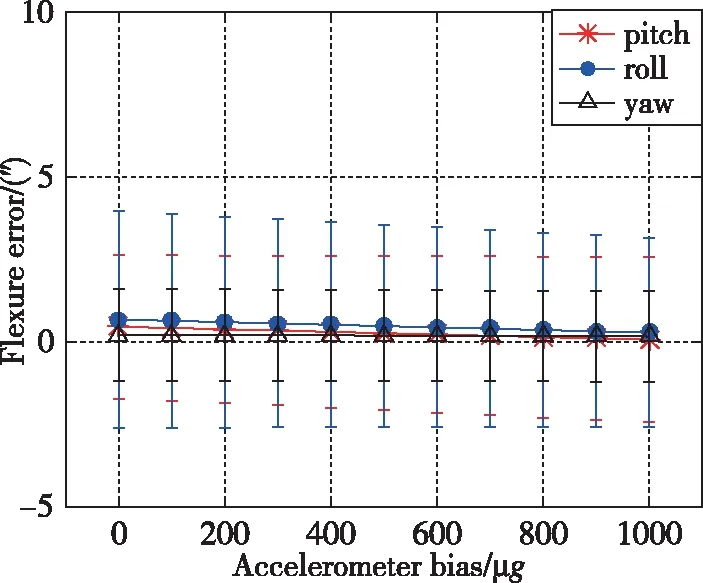
图10 加速计零偏对形变测量误差的影响曲线
由于陀螺和加速度计的常值偏置误差可以得到有效估计,惯性器件常值零偏对形变测量精度的影响较小,可用低成本、中等精度的局部基准达到高精度主惯导基准的精度水平,从而降低全船惯性基准的整体成本。
从上面的仿真结果可以看出,惯性矢量匹配形变测量方法的启动时间快、精度高,可有效抑制陀螺和加速度计常值零偏误差,且形变测量误差不随时间发散。通过惯性矢量形变测量可以实现任意两套惯性基准之间的相对坐标系偏差测量,从而构建一个高精度姿态基准网络,实现主惯导基准姿态信息的共享。同时,统一姿态基准体系可发挥多惯性基准设备协同优势,实现状态监测、故障诊断和冗余备份等功能,提高姿态信息的生命力和保障能力。
4 结论
本文基于惯性矢量匹配形变测量方法,提出了一种舰艇统一姿态基准体系结构。该体系结构通过对形变精确测量和补偿,将各用户设备坐标系与主惯导基准高精度对齐统一,构建以主惯导为中心的统一姿态基准体系,为舰艇各用户设备提供自主、精确、连续、可靠、稳健的姿态信息保障。相较于传统的独立局部基准,统一姿态基准只需要用中等精度的惯性器件就可将基准的性能提升至与主惯导基准相当的水平,降低了系统的建造成本。同时,通过惯性基准组网和信息融合,实现对每一个设备的状态监测、故障诊断和健康管理,提高系统的智能性和可靠性。
目前,我国大型舰艇仍采用传统的主惯导和分布式独立局部基准的姿态基准体系结构,与国外相比仍有差距。未来,应制定统一姿态基准的规范和标准,研制统一姿态基准设备,加快构建舰艇统一姿态基准体系结构,以适应未来信息化作战发展需求。
