一种基于卷积神经网络的林火蔓延模型
2022-06-22王欣宇李兴东
曹 林, 王欣宇, 李兴东
(东北林业大学机电工程学院,黑龙江 哈尔滨 150040)
森林火灾是失去人为控制,在林地内自由蔓延和扩展,并对森林生态系统和人类带来严重损失的自然灾害。林火蔓延是一个受多种环境因素(地形、气象、可燃物)影响的复杂运动过程,其中涉及许多潜在的物理现象和化学现象的相互作用[1]。为了及时有效地预防和扑救林火,为控制林火蔓延提供科学依据,对林火的时空演变规律进行研究是很有必要的。
目前,传统的林火蔓延模型都是基于一维方向的速度公式,主要有美国的Rothermel模型、加拿大林火蔓延模型、澳大利亚的McArthur模型和中国的王正非模型[2],在此基础上结合椭圆增长模型[3]、元胞自动机、渗透理论、迷宫算法等蔓延方式可以模拟林火在二维平面上的时空变化。美国火灾科学实验室开发的FARSITE[4]火灾模拟器,就是利用Rothermel模型和椭圆增长模型实现火灾在二维空间上的可视化;张菲菲在传统的林火蔓延模型基础上对王正非-毛贤敏林火蔓延模型进行改进,并结合元胞自动机原理,应用GIS对林火蔓延进行展示[5];梁娱涵运用Rothermel模型和迷宫算法的蔓延扩散原理,实现林火蔓延过程的模型构建,得到林火的过火过程[6];夏其表等主要利用渗透理论建立森林火灾的蔓延模型,通过该模型来模拟森林火灾的动向,模拟森林树木的分布情况和林火蔓延情况[7]。由于上述方法中的速度公式计算的火速与实际的火速具有一定的差别,而且蔓延原理也不能准确的描述火线的位置变化,所以二者结合生成的林火蔓延模型预测火线位置时会形成误差累积,与实际的火线位置具有一定的误差。
随着人工智能的发展,深度学习[8](DL,Deep Learning)成为了机器学习(ML,Machine Learning)领域中一个新的研究方向。深度学习是学习样本数据的内在规律和表示层次,通过组合低层特征,形成更加抽象的高层来表示属性类别或特征[9],以发现数据的分布式特征表示,并已广泛应用于对象识别和检测、语音识别和自然语言处理等领域[10]。卷积神经网络(CNN)[11-12],已被公认为最成功和广泛使用的深度学习算法之一,其具有局部感知和参数共享两个特点,局部感知即CNN中的每个神经元不需要感知图像中的全部像素,只对图像的局部像素进行感知,然后在更高层将这些局部的信息进行合并,从而得到图像的全部表征信息,参数共享即特征图同一通道内的所有像素共享一组卷积核权重系数[13],这减少了参数的数量,降低了网络的复杂度,使运算变得简洁、高效。在实际的燃烧图像上判断一个像素是否满足燃烧条件,这不仅与像素本身有关,还要考虑周边其他像素的情况,这与CNN中的局部感知类似[14]。Krizhevsky展示了CNN在ImageNet竞赛中了解到的许多特征,描述了3个颜色通道[15]的相互关系,与图像分类类似,高程、含水率和风速等数据可以视为图像中的通道,有了足够的数据,一个基于特征的卷积神经网络将能够学习这些物理参数之间的关系,被用来预测未来的燃烧图[16]。
基于上述CNN的优势,本研究的目标是建立一个CNN模型用来预测林火蔓延中的火线位置,输入为二维的坡度图、坡向图、风速图、风向图、含水率图和t时刻的燃烧图,输出为预测的t+1时刻的燃烧图。最后随机选取两场火的数据,从过火区域一致性检验CNN模型预测火线位置的准确率。
1 数据采集与处理
1.1 实验数据的采集
本研究所需要的数据从点烧实验中获取,该实验在黑龙江省哈尔滨市柳条村室外进行,实验场地如图1所示。数据采集设备包括红外相机、风速风向仪、卷尺、黑色密封容器和指南针。红外相机采集的数据是每个时间步长对应的火场燃烧图像;风速风向仪采集的数据是对应的风速和风向;卷尺用来测量实验场地的高度和长度,用于计算坡度;黑色密封容器采集的是可燃物样本,用于计算含水率;指南针用来测量实验场地的坡向。

图1 点烧实验场地
1.2 实验数据预处理
实验场地的坡度通过如下公式计算:
(1)
式中:slope为实验场地的坡度(°);h为实验场地的高度(m);l为实验场地的长度(m)。
点烧实验中使用了4台风速风向仪,分别放置在实验场地的四周,获取经过火场和不经过火场的风速和风向,如图2所示,每台风速风向仪采集的数据都不同,为了获得接近实际的火焰中部风速,所以将采集的风速和风向求平均值。
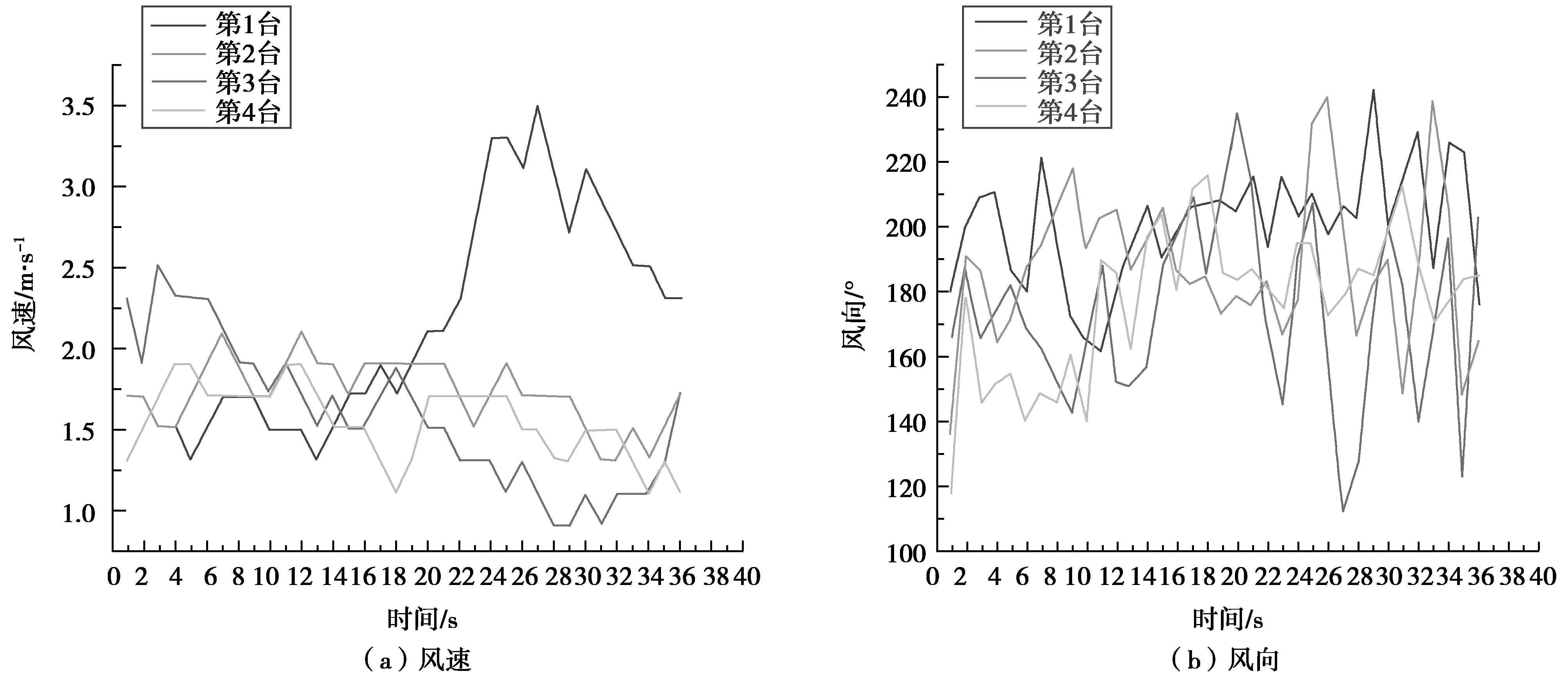
图2 风速风向仪采集的风速和风向
实验中采集的可燃物的含水率通过烘干机测得,公式如下:
(2)
式中:f为含水率(无量纲);m1为可燃物烘干前的质量(kg);m2为可燃物烘干后的质量(kg)。
在红外相机采集火场燃烧状态图像过程中,由于红外相机与实验场地之间有一个倾斜角,而不是直接垂直朝下(正投影);而且无人机处于悬停状态,极易受到风的影响发生抖动,造成红外相机中采集的火场燃烧图像位置发生变动,所以基于以上两点,需要对获取的原始火场燃烧状态图像进行透视变换处理,以获得正投影下的火场燃烧状态图像。透视变换[17],是把一个图像投影到一个新的视平面的过程,变换公式如下:
(3)

X1=X×Z1
(4)
Y1=Y×Z1
(5)
式中:X,Y为变换后的图像的像素坐标。
通过透视变换可以将每个时间步长对应的火场燃烧图像变换到同一位置,处理过程如图3所示。图3(a)中4个白色小点是标定点,中间的白色区域是火场的燃烧区域,图3(b)是经过透视变换处理后的火场燃烧图像。

图3 火场对应的燃烧状态图像
红外相机的成像原理是将物体表面的温度转换成人眼可见的图像,温度越高,图像越接近白色,表示为正在燃烧的状态;反之,温度越低,图像越接近黑色,表示为未燃烧的状态或燃烧后熄灭的状态。如图3(b)所示白色部分之间有局部范围是黑色的,这是燃烧后熄灭的状态。而本研究只需要正在燃烧和未燃烧两种状态,所以需要将燃烧后熄灭的状态经过中值滤波处理转换为正在燃烧的状态,如图3(c)所示,白色表示正在燃烧的状态,黑色表示未燃烧的状态。
由于坡度、坡向、风速、风向等参数的单位是不同的,见表1,所以将这些输入参数归一化,避免不同参数值之间的数量级相差过大,导致大数的变化掩盖掉小数的变化。

表1 输入参数
2 研究方法
2.1 基于速度公式的蔓延模型
传统的林火蔓延模型都是速度公式结合蔓延方式形成的,如Rothermel模型和椭圆增长模型(RH),Rothermel模型是一个速度公式,如下所示:
(6)
式中:R为火的蔓延速度(ft/min);IR为火焰区反应强度(Btu/ft2·min);ζ为火的蔓延率;φw为风速修正系数;φs为坡度修正系数;pb为可燃物床层密度(Ib/ft3);ε为有效热系数;Qig为预燃热,即点燃单位质量的可燃物所需的热量(Btu/Ib)。椭圆增长模型就是假设火点以椭圆的方式扩散,如图4所示,火点是椭圆的焦点,对应的火速的大小和方向就是风速和坡度的矢量和的大小和方向。
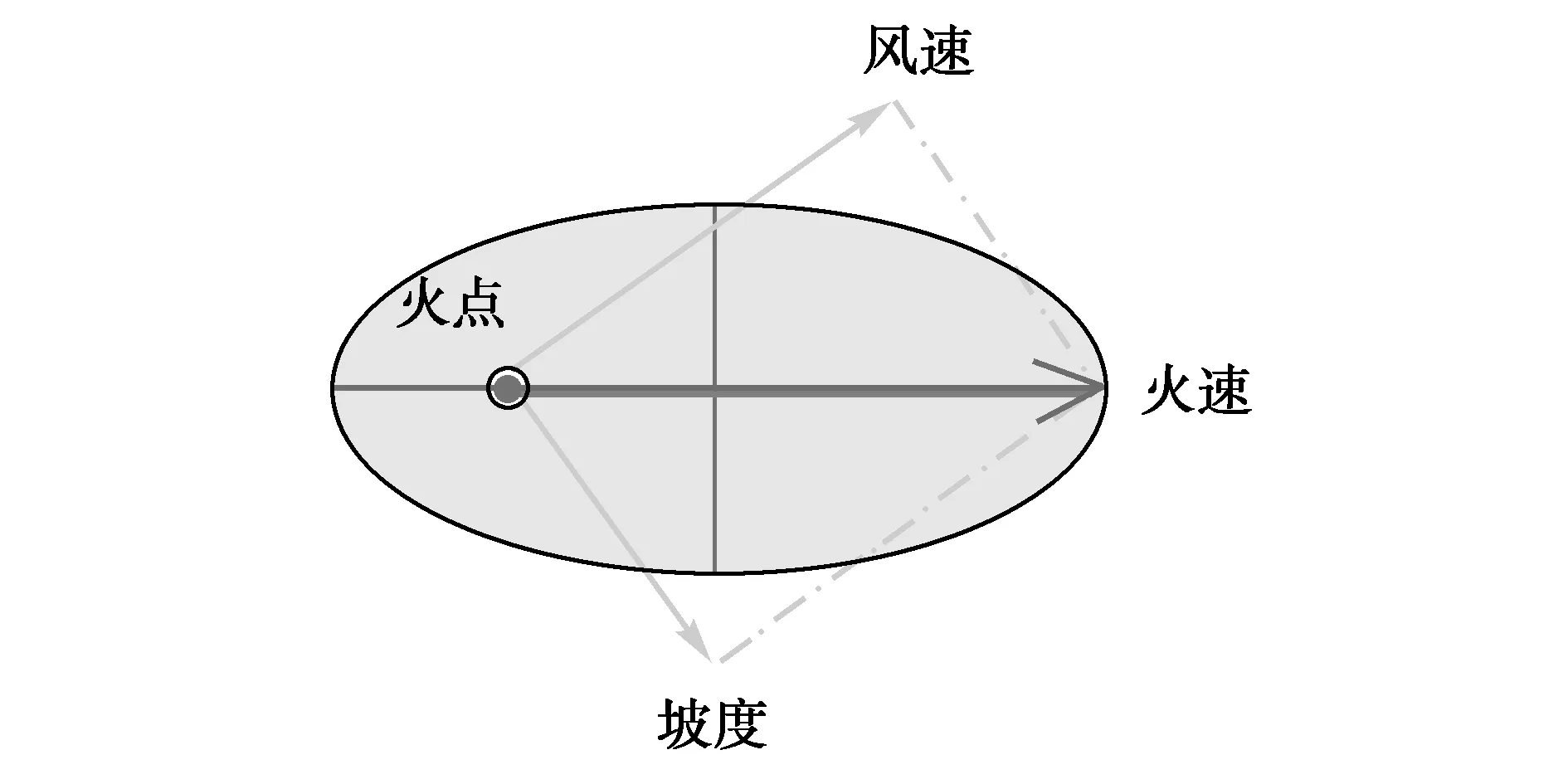
图4 椭圆增长模型
RH模型的蔓延过程如图5所示,在生成的火线上随机选取一定数量的点,然后将这些点当作火点以椭圆的方式蔓延,最后将每个火点生成的小椭圆包络起来,形成下一时刻对应的火线,如此循环,就生成了一圈圈的火线。计算的每个火点的位置都有一定的误差,所以每圈火线的位置误差都是其上火点位置的误差累积之和,随着火线周长变大,火点数量随之增加,预测火线位置的误差也相应的变大,准确率也相应降低。
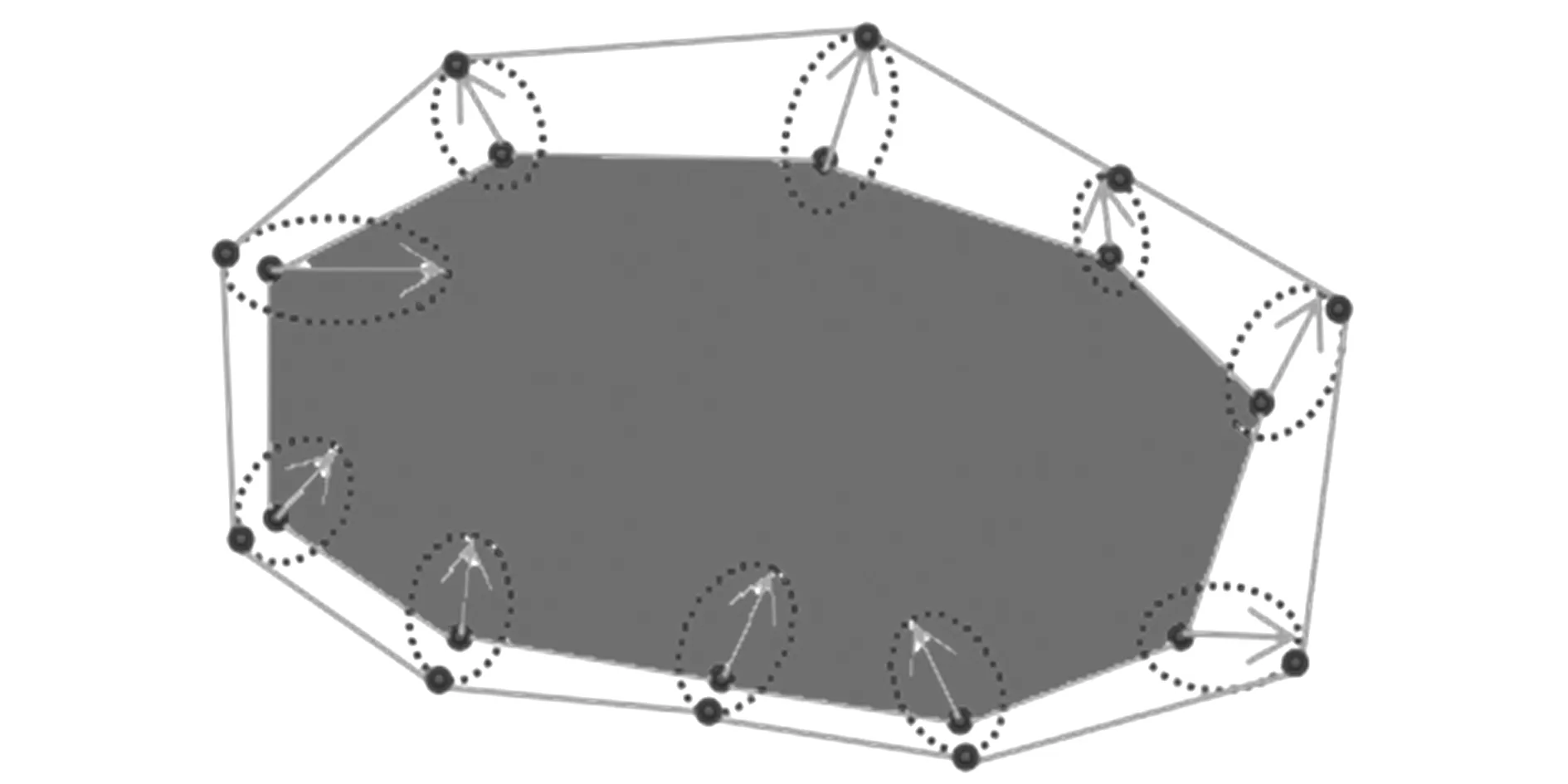
图5 RH模型的蔓延过程
2.2 基于卷积神经网络的蔓延模拟
使用RH模型预测火线位置的误差累积较多,而卷积神经网络误差累积小。卷积神经网络一般包含输入层、卷积层、池化层、全连接层和输出层。输入层用于输入数据,卷积层使用卷积核进行特征提取和特征映射,池化层进行下采样,对特征图稀疏处理,减少运算量,全连接层进行重新拟合,减少特征信息的损失,输出层用于输出结果。
2.2.1 CNN模型
卷积神经网络的框架如图6所示,网络中包含一个输入层、三个卷积层、三个最大池化层、一个全连接层和一个输出层。输入层包含二维的坡度图、坡向图、风速图、风向图、含水率图和t时刻的燃烧图,输出层包含t+1时刻的燃烧概率图,燃烧概率图中每个像素值表示的是每个像素燃烧的概率,所有卷积层的卷积核大小为3×3,步长为1×1,所有池化层的卷积核大小为2×2,步长为2×2,激活函数为线性整流函数(ReLU),研究表明该函数更加有效率的梯度下降以及反向传播,避免了梯度爆炸和梯度消失问题。

图6 CNN框架图
CNN模型包含的超参数见表2,样本数据的总量为5 000,训练过程的损失值的变化如图7所示。
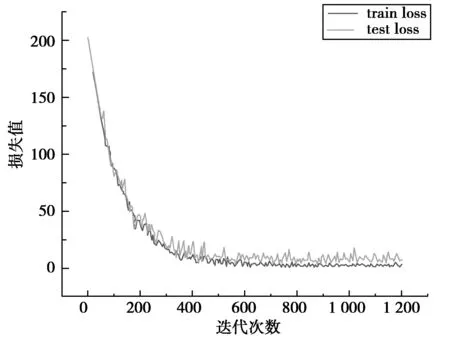
图7 训练过程损失值的变化

表2 CNN模型包含的超参数
2.2.2 燃烧概率阈值的确定
CNN模型的输出层是燃烧的概率图,然而在实际的森林防火工作中,需要知道燃烧图中每个像素是否燃烧,所以对燃烧的化概率图进行后处理,并用一个3×3的中值滤波器[18-19]来平滑图像,得到预测的燃烧图。点燃概率的阈值用来确定每个像素是否被烧毁,在后处理中使用的最佳阈值是通过计算5 000个预测的平均F-Measure来确定的,如图8所示,当F-Measure[20]最高时,对应的阈值为0.6,这个阈值是固定的,在整个工作中用于后期处理。
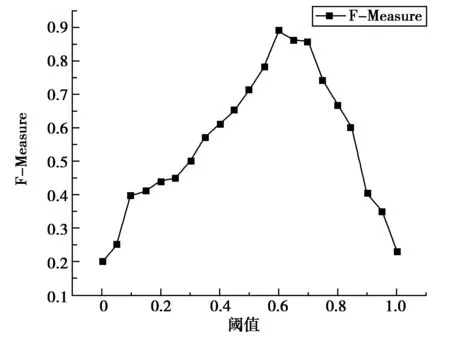
图8 F-Measure与阈值之间的关系
F-Measure是一种统计量,是精确率(Precision)和召回率(Recall)的加权调和平均,常用来评价分类模型的好坏,计算公式如下:
(7)
式中:P是精确率(precision),R是召回率(Recall)。
(8)
式中:TP为实际燃烧图上表示燃烧状态,并且在预测燃烧图上也表示燃烧状态的像素的个数;FP为实际燃烧图上表示未燃烧状态,而在预测燃烧图上表示燃烧状态的像素的个数。
(9)
式中:FN为实际燃烧图上表示燃烧状态,而在预测燃烧图上表示未燃烧状态的像素的个数。
3 预测结果一致性分析
随机选取其余两场火的点烧实验数据对RH模型和CNN模型进行区域一致性分析,每场火包含不同的数据,见表3。

表3 每场火的输入参数
预测结果和真实结果如图9所示,在这两场火中,可以直观地看出CNN 模型的模拟结果RH模型更接近于实际燃烧结果。
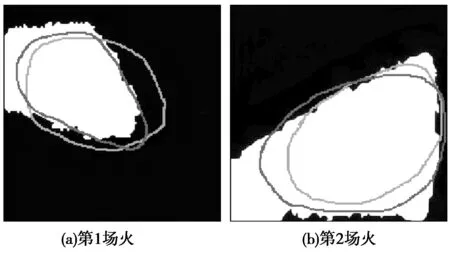
图9 预测结果与真实结果 注:白色表示已经燃烧的部分,黑色表示未燃烧的部分,红线表示RH模型预测的火线,蓝线表示CNN模型预测的火线
混淆矩阵是表示精度评价的一种标准格式,用n×n的矩阵形式来表示。在图像精度评价中,主要用于比较分类结果和实际测得值,可以把分类结果的精度显示在一个混淆矩阵里面,见表4。

表4 火蔓延的预测结果与实际结果对应的混淆矩阵
燃烧未燃烧总和Kappa系数[21]用于一致性检验,也可以用于衡量分类精度,但Kappa系数的计算是基于混淆矩阵的,在林火蔓延预测中的计算结果为0~1,值越大,精度越高。计算公式如下:
(10)
式中:po为每一类正确分类的样本数量之和除以总样本数,公式如下:
(11)
pe的定义如下:
(12)
这两场火的预测结果与实际结果的混淆矩阵的具体数值见表5。

表5 两场火对应的混淆矩阵
评价指标kappa系数如图10所示,两场火中CNN模型的kappa系数最小值为0.87,而RH模型的最大值为0.84,很显然CNN模型的Kappa系数的最小值都大于RH模型的最大值,说明CNN模型预测火线位置的准确率远高于RH模型。

图10 两种模型的Kappa系数
两场火中CNN模型的Kappa系数是不一样的,原因如下,每场火中采集的风速是环境风,不是火焰中部风速,且没有考虑到火场对风速的影响,还有实验设备本身的精度问题,故采集的风速小于实际风速,这就使得模型预测的火线位置会产生一定的偏差。
4 结论与展望
为了高效地预测林火蔓延过程中的火线位置,本文提出了CNN模型,该模型在训练时不依赖于其他任何模型,不需要先验知识,直接获取所需的实验数据进行训练即可,而且可以进行连续预测。利用采集的实验数据对CNN模型进行训练,训练后的CNN模型预测火线位置的准确率高于传统的林火蔓延模型。虽然CNN模型的预测结果比较符合实际情况,但是对于不同的火进行蔓延预测,得到的模拟结果有一定的差别,为了更精确的预测火线位置,需要深入研究各种参数对林火蔓延的影响,减少森林火灾对生态系统和人类生活造成的损失。
