大功率轻量化无人机激光清障系统设计
2022-06-22郭可贵苏欣欣
万 能,汪 晓,郭可贵,苏欣欣
(1.国网安徽省电力有限公司合肥供电公司,合肥 230000;2.国网安徽省电力有限公司超高压分公司,合肥 230000;3.北京煜邦电力技术股份有限公司,北京 100089)
无人机是一种不载人的飞行器,其通过无线电遥控和其自身的控制装置进行操纵,无人机的类别较多,由于使用领域的差异,无人机的尺寸、重量、最大行驶里程、最长航行时间、飞行高度和速度等多方面均存在明显差异[1]。 依据无人机的用途可将其划分成军用和民用,前者指的是用于侦察、诱饵等情况下的无人机,后者指的是用于巡检、监视以及勘探和测绘等方面的无人机[2]。 当下无人机应用的领域越来越多,其能够完成较多人力较难完成或者无法完成的工作,可极大程度降低人力消耗。 线路排障是电力企业中的一项重要工作,如果输电线路上存在障碍物会导致输电线路发生跳闸,影响正常的电能输送。 因此,需对线路实行清障处理[3]。 无人机则成为线路清障的最佳方式,其可在带电的环境下完成障碍物清除,其工作效率远优于人工清障的工作效率。 针对无人机清障作业,为了实现无人机的更好的控制以及清障功能[4],大功率轻量化的无人机成为清障作业的首选,其能够在大功率下,尽量保证活动部件的轻量化,保证更好的清障操作控制效果。
针对线路清障问题,文献[5]和文献[6]分别展开相关研究,各自设计了基于飞控信号频谱特征和基于强跟踪H_-/H_∞优化的检测与识别系统, 用于实现障碍物的检测和识别,为清障处理提供可靠依据。 但是上述系统在检测和识别中,无法计算障碍物的宽度,因此,对于障碍物情况的判断存在一定局限性。 本文基于此,为保证更好的清障效果,以大功率轻量化无人机为主要研究对象,设计无人机激光清障系统,用于实现线路障碍物的清除。
1 大功率轻量化无人机激光清障系统设计
1.1 清障系统架构
本文设计的大功率轻量化无人机激光清障系统由感知层、网络层、逻辑控制层以及用户服务层组成,系统整体架构如图1 所示。
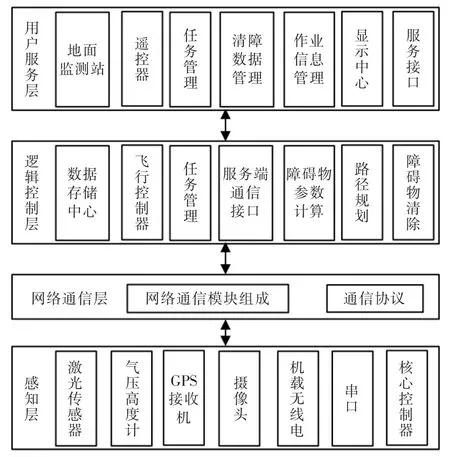
图1 系统总体架构Fig.1 Overall system architecture
感知层:该层是系统的基础层,主要包含多种激光传感器、气压高度计、GPS 接收机、摄像头、机载无线电设备、集成传感器板以及串口和采集核心控制器等,主要用于感知无人机作业环境[7],并通过串口实现数据交换。 为降低机载重量,上述所有搭载设备均采用小体积、低功耗的传感设备。
网络通信层: 该层是系统运行的通信支撑层,主要由网络通信模块组成,用于传输感知层获取的数据信息。 其在传输过程中,需按照特定的传输协议实现,以此保证数据传输的安全性。
逻辑控制层:该层是系统的核心执行和清障实现层,通过改进蚁群算法完成障碍物清障作业路径规划以及障碍物检测,同时对障碍物的参数实行计算,依据计算结果执行清障处理。 除此之外,该层设有无人机飞行控制器,能够实现对无人机的航行控制。 该层包含数据存储中心、安全控制、任务管理、服务端通信接口、障碍物参数计算、障碍物清除等功能。
用户服务层: 该层是系统的整体管理和展示层,其设有地面监测站,可通过无线设备直接连接无人机,下达清障任务指令;除此之外,如果无人机的自动控制系统发生异常[8],地面监测站的工作人员可利用遥控器对无人机实行控制[9]。 除此之外,无人机获取的障碍物检测结果以及清除结果均可在该层呈现,可实现清障任务实时监控。 并且该层能够对无人机激光清障结果、 作业信息等进行管理,便于多个部门之间对该信息进行查询共享。
系统的用户服务层下达清障任务指令后,无人机开启清障任务执行,通过传感设备以及摄像头获取障碍物以及作业环境的信息,通过网络层将该信息传送至逻辑控制层,逻辑控制层完成信息的接收和存储后,依据感知层完成清障巡检作业的路径规划后,按照规划路径开始障碍物巡检[10],对数据实行处理并计算障碍物的详细参数,依据判别函数完成障碍物识别,实现障碍物清除;同时将清障结果呈现至用户服务层,用户服务层则可对无人机整个清障过程实行呈现。
1.2 系统硬件
1.2.1 采集核心控制器
感知层在对障碍物信息以及无人机作业环境实行采集过程中,为了保证信息采集、处理以及输出时的安全性和完整性,本文采用STM32 作为采集的控制核心,完成信息采集,其结构如图2 所示。 核心控制器整体分为采集模块、输出模块、电源模块3个部分。 采集模块采集的信息经由输出模块输出,电源模块主要作用是提供稳定电源支撑,保证采集的持续性。
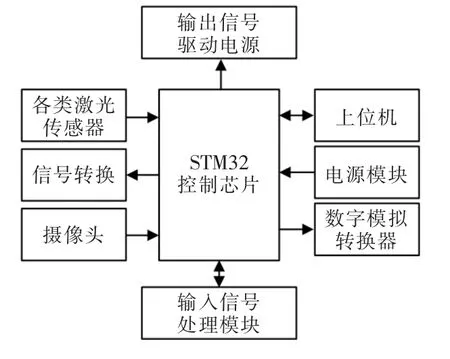
图2 采集终端核心控制器结构Fig.2 Acquisition terminal core controller structure
1.2.2 无人机飞行控制器
无人机在障碍物巡检飞行过程中,为保证其在飞行过程中的稳定,可靠获取障碍物信息[11],需控制无人机的飞行姿态, 逻辑控制层采用ARM 处理器作为飞行控制的核心,实现无人机的控制,整个控制结构如图3 所示。 无人机飞行过程中,依据传感器可获取无人机的飞行状态情况,实时保证无人机飞行姿态的稳定性,并且GPS 接收机能够获取无人机的飞行位置,使无人机能够按照规划好的障碍物巡检路径飞行[12];并且其通过无线设备连接地面监测站,接收任务指令以及监测站的控制。
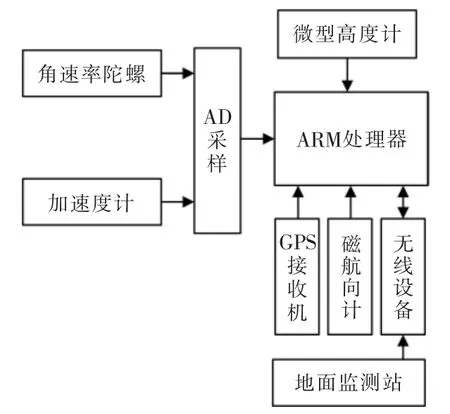
图3 无人机飞行控制结构Fig.3 UAV flight control structure
1.3 无人机清障作业路径规划
无人机在进行清障作业时,需先规划作业路线,无人机按照规划的路径实行巡检[13],及时获取障碍物信息。 由于无人机的清障作业区域会存在不用的形状,甚至会存在区域之间相连接或者重叠的情况,因此,在作业时,需实行路径规划,对作业路径实行排序。 本文采用改进的蚁群算法完成无人机清障作业路径规划。 改进的蚁群算法在对作业路径实行规划排序时,采用排序方式对无人机清障作业路径实行处理的同时,需对各个路径的进入点实行确定。
1.3.1 确定作业路径排序和进入点
设i(=1,2,…,N)表示无人机清障作业路径顺序编号,该路径的两端分别用Ai和Bi表示,通过蚂蚁对路径实行遍历,且路径遍历时选择的某路线能够实现全部路径遍历,则第m 只蚂蚁选择的无人机清障线路为

蚂蚁在选择清障作业路径进入时,由于每条清障作业均存在2 个端口,导致遍历过程中发生转移的路径长度也存在差异,因此,需引入蚂蚁对无人机清障作业路径进入点Om(t)实行记录,其为

上述2 个公式中,n=1 是蚂蚁的起点,该起点的选择有2 种方式,一是人为选择,二是随机选择。 在起点确定的基础上,选择无人机清障作业的最佳路径[14],同时选择该路径的进入点,其依据概率计算结果完成。 如果当下路径i 上有蚂蚁m,路径j 为选择的清障作业路径,则对Aj和Bj实行选择,确定进入点,其依据两者的概率计算结果确定,计算公式为
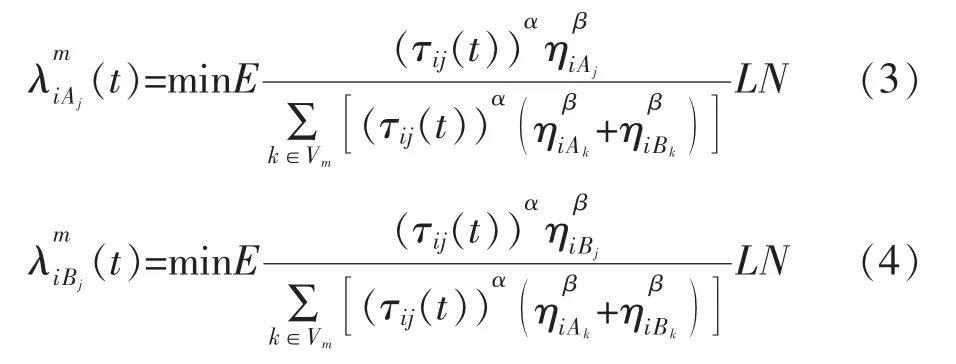
式中:α 和β 均表示重要程度, 前者对应信息素,后者对 应启发因子;Aj(k)和Bj(k)均表示到达终点,其对应的启发因子用ηiAj(k)和ηiBj(k)表 示;Vm表 示第m 只蚂蚁选择的作业路径集合;E 表示最优路径目标函数;τij(t)表示信息素。
1.3.2 确定无人机清障距离和角度
实现无人机清障作业路径规划过程中,在执行清障处理前需对障碍物实行判断和计算,其依据感知层激光位移传感器获取的障碍物感知数据完成计算和判断。 依据计算和判断结果确定清障时无人机的清障处理角度和与障碍物之间的距离。 设激光位移传感器扫描一次获取的障碍物数据序列为Q,激光传感器的角度用θ 表示,其量程用(ξ1,ξ2)表示,距离值用Xi表示,位移传感器每次探测获取的障碍物数据总数量为(X0,X1,…,XQ-1),将Q 中的数据实行划分,形成X0~Xq-1、Xq~Xp、Xp+1~XQ-13 个数据段,前者和后者的中数据取值全部为0,Xq~Xp不为0时,则定义该数据段之间的p-q+1 个距离的值为1个数据块,为数据块Xq~Xp;其起始和结束2 个角度分别用φ 和φ 表示,则在φ~φ 方向中如果存在障碍物,并且满足式(5)和式(6):
式中:ε 表示2 个数据之间的量程;数据块Xq~Xp则对应障碍物。

式中:γ 表示数量,对应非零的数据,即表示有效数据数量。
基于角度、距离以及宽度之间存在三角关系,即可求出数据块对应的障碍物宽度,计算公式为

完成障碍物的宽度计算后,则对障碍物的特征进行判断,将Xi的方差作为特征,同时设定判别函数f(κ),f(κ)大于0,表示故障,小于0 则表示非故障。 最终依据障碍物的类别,判断无人机的最佳清障距离和角度,实现清障处理。
2 实验结果分析
为测试本文系统的应用效果和性能,将其用于某电力企业运维中心的线路清障巡检中,此次实验时的清障任务线路数量共36 条,线路的分布存在交叉以及重复区域,线路总长度为420 km。
测试过程中,本文采用六翼无人机完成清障测试,该无人机功率为30 kW,最大可载重80 kg,机身均为轻量化设计。 机身安装喷火清障装置,装置的技术参数如表1 所示。
表1 喷火清障装置参数详情Tab.1 Details of the parameters of the fire cleaning device
无人机在实行清障过程中,需对巡检目标实行感知, 获取清障作业环境的数据以及障碍物信息,为无人机清障作业提供可靠依据,因此需保证系统激光传感器的采集性能。 针对应用本文系统的无人机的数据采集性能实行测试,以采集到的信号误差作为衡量标准(期望标准低于10%),判断系统的采集性能,结果如图4 所示。 测试结果仅呈现随机抽取的任意时间段内的信号采集结果。 对图4 测试结果实行分析后得出,应用本文系统的无人机在不同的噪声下,均能够完成清障任务线路的信号感知,并且感知结果与实际信号之间的误差结果均低于7%,因此,应用本文系统无人机能够可靠完成清障任务线路状态感知,为障碍物的检测和计算提供可靠依据。
图4 采集性能测试结果Fig.4 Collect performance test results
为测试应用本文系统的无人机在清障巡检过程中对于障碍物的检测效果,以检测覆盖率作为衡量标准(期望标准为95%以上),获取应用本文系统的无人机在不同的检测线路数量下,在不同的飞行速度下,无人机对障碍物的检测覆盖率结果,如图5所示。 对图5 的测试结果实行分析后得出,随着检测线路数量的逐渐增加,在不同飞行速度下,应用本文系统的无人机均能够较好地完成清障任务线路的检测,其覆盖率均达到96.5%以上。由于逻辑控制层采用ARM 处理器作为飞行控制的核心,因此,无人机应用本文系统后, 能够保证无人机的稳定性,实现障碍物的全面检测。
图5 无人机障碍物检测覆盖率测试结果Fig.5 UAV obstacle detection coverage test results
为测试应用本文系统的无人机对于线路障碍物的检测识别效果,随机获取任意一条清障任务中线路中的10 处检测点, 其中在检测点2、4、5、7 处为故障物,剩余均为线路输电设备。 应用本文系统的无人机对于线路障碍物的检测识别效果, 如图6所示。 对图6 的测试结果实行分析后得出,应用本文系统的无人机能够准确识别训练线路中的障碍物,其中检测点2、4、5、7 处的判别函数值均大于0,其他检测点的判别函数值均小于0, 检测结果与实际结果一致,能够为清障处理提供准确的清障目标。
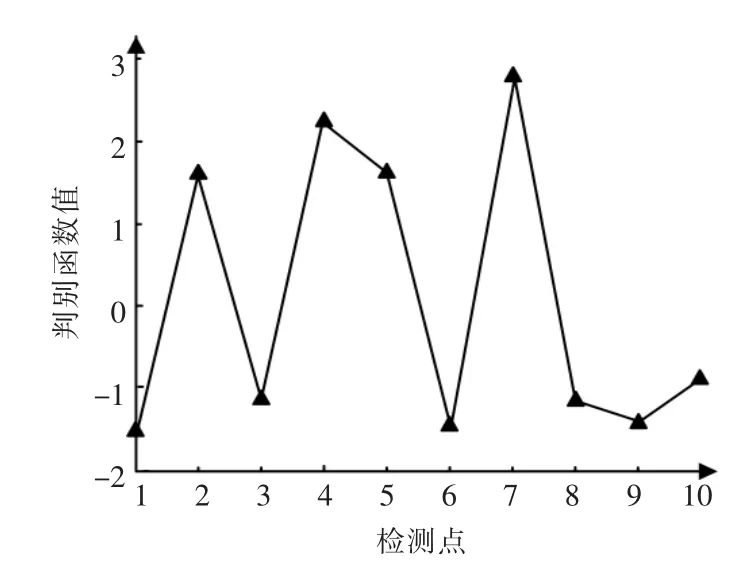
图6 本文系统的障碍物检测效果Fig.6 Obstacle detection effect of the system in this paper
为直观呈现应用本文系统的无人机清障效果,获取本文系统应用后,无人机在执行线路清障任务过程中的清障呈现界面, 结果如图7 所示。 对图7的测试结果实行分析后得出,本文系统能够呈现出无人机的障碍物检测结果、清障过程以及清障后的线路情况,并且无人机在识别到障碍物后,能够自动调整机身位置,同时采用喷火的方式对障碍物实行处理,处理后线路上没有障碍物残留。 除此之外,可通过本文系统查看无人机的巡线情况结果、历史清障数据、航行路径规划结果等,能够保证大功率轻量化无人机激光清障的良好效果。

图7 无人机清障作业呈现结果Fig.7 Results of UAV obstacle removal operation
3 结语
电力线路中存在许多架空线路,该线路中也包含特高压、高压等输配电线路,在对这些线路实行日程运维管理过程中,障碍物的清除处理则是运维管理中的一项重要工作。 因为障碍物的存在会导致线路发生跳闸等情况,甚至会导致设备发生损坏。但是人力清障则难度较高,效率较低且风险较高,因此大功率轻量化无人机激光清障成为电力系统中的主要清障手段。 为了更好地实现清障效果,提升无人机清障效率,本文设计大功率轻量化无人机激光清障系统,并将该系统用于某电力企业的运维管理中,测试其应用效果。 测试结果显示:应用本文系统的无人机能够可靠感知清障线路的信号,同时能够全面完成线路检测,准确识别线路中的障碍物并完成障碍物清除。
