空中目标作战任务智能判识方法研究*
2022-06-20赵文栋张明智贺筱媛郭圣明
赵文栋,张明智,贺筱媛,郭圣明
(1. 国防大学联合作战学院,北京 100091;2. 中国人民解放军61267部队,北京 101114)
在现代化战争中,指挥员面对的是海量的、瞬息万变的战场态势信息,大脑已经无法快速容纳和高效处理,感官也无法承受战场态势超常规的变化速度,严重限制了“观察—判断—决策—行动”(“OODA环”)的运转速度。准确迅速地判识敌方作战任务有利于提升“OODA环”的循环速度,提高作战指挥效率,促使战场态势向对己方有利的方向转化,对最终取得战争的胜利具有重要意义。
当前,人们在军事领域开展了许多与作战任务判识相关的研究。传统的方法主要有证据理论、模板匹配、贝叶斯网络和神经网络等方法。证据理论方法首先建立置信规则库,然后利用证据推理对目标的作战任务进行判识。模板匹配方法首先根据专家经验构建模型库,然后通过推理实际特征与模板的相似度来识别作战任务。贝叶斯网络方法运用军事专家知识构建网络,特征由节点表示,转移关系由边表示,关系的强度由概率值表示,通过对网络参数进行更新,设定相应阈值,进行任务判识。神经网络法运用特征数据集训练神经网络,得到神经网络参数,通过训练好的神经网络判识目标的作战任务。然而,空中的目标执行作战任务是通过一系列战术动作来完成的,目标的状态特征会呈现出时序、动态的变化,上述的传统方法仅利用单一时刻的特征信息对目标的作战任务进行判识,并不是十分合理。
卷积神经网络和简单的循环神经网络均可用于处理时序数据,但当时间较长时,卷积神经网络无法获得全局特征,简单的循环神经网络存在长程依赖问题。引入门控机制的循环神经网络解决了长程依赖问题,正逐渐被用于解决作战任务判识这种时序分类问题。文献[8-9]通过将不同时刻的多维态势特征输入基于长短时记忆(Long Short-Term Memory,LSTM)网络的作战任务智能判识模型,实现对作战任务的判识。文献[10]在LSTM网络的基础上,引入注意力(Attention)机制和双向(Bidirection)循环机制,构造AM-BiLSTM模型,充分地利用历史和未来信息对网络参数进行训练,突出了影响任务判识的关键信息,实现对作战任务的判识。上述模型运用了目标动态变化特征,在一定程度上解决了作战任务判识存在的问题,但所使用的神经网络层数较少,特征抽象能力不足,影响判识效果。另外,当获得的时序特征信息较短时,采用上述模型对作战任务进行判识将不再有效。
综上,本文提出了一种融合先验知识的作战任务智能判识方法。该方法以门控循环单元(Gated Recurrent Unit, GRU)网络为基干构建两层双向门控循环单元(BiGRU)网络,引入残差机制防止由于网络层数增加可能出现的模型性能退化问题;运用注意力机制捕捉相互关联的重要态势特征,提高判识效果,将先验知识融入神经网络模型,确保在获得时序信息较短时对作战任务判识的有效性。
1 作战任务判识问题描述
空中目标试图完成的作战任务是指为达到某种作战目的而采取的一系列作战行动。对空中目标作战任务的判识是指运用军事领域知识对从战场态势获得的敌方目标和环境信息进行分析,判识出空中目标作战任务的过程,目标作战任务判识过程如图1所示。
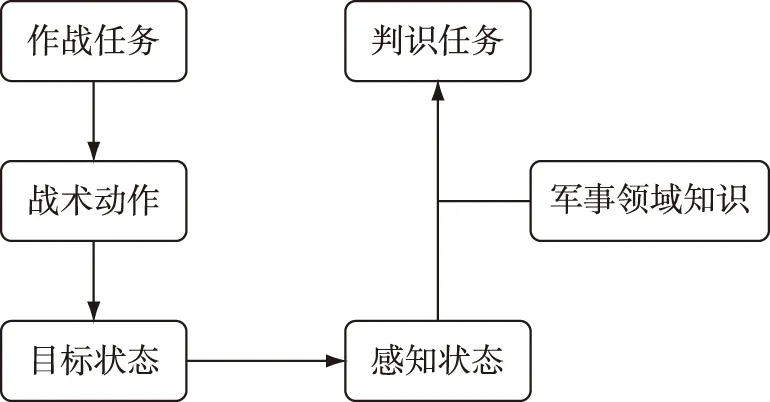
图1 作战任务判识过程
空中目标执行的作战任务与其状态之间存在特定联系,为判识作战任务,应结合相应的作战情况,确定空中目标的作战任务空间以及与之联系紧密的特征。空中力量遂行作战行动时,为完成有利的战场布势,在主要作战方向上形成强大突击力量,达成作战企图,按照便于指挥协同,充分发挥各参战力量作用等要求,将所属的作战力量编组并赋予不同的作战任务,本文结合军事专家知识以及文献[6]的内容进行分析,建立空中作战任务类型空间集为{空战巡逻、预警指挥、空中加油、空中侦察、电子战、空中进攻、空运、压制敌防空、空(机)降、转场}。与空中作战任务关联紧密的特征通常包括飞行速度、高度、航向角、方位角、距离、飞行加速度、雷达反射面积、对空雷达状态、对海雷达状态、干扰状态、敌我识别应答和机动类型等。本文在确定空中作战任务特征时考虑的情况有:1)尽早判识目标的作战任务,此时目标距离较远,无法准确地获得空中目标的加速度信息;2)空中目标在作战过程中会严格控制使用机载电子设备,使对方难以获得相关电子情报;3)飞机的类型限制其自身的机动能力,因此限制了其所能执行的任务;4)指挥实体往往将各种作战力量按照各自作战任务、作战能力和战场条件,在地面实行梯次部署于各机场,来获得有利的空战态势。本文将空中目标任务判识特征集确定为{机型、起飞机场、目标经度、目标纬度、高度、速度、航向角}7维特征向量。
作为一种典型的模式识别问题,可以将作战任务判识表示为由不同时刻的作战任务特征向量构成的特征集到作战任务类型空间的映射函数,如式(1)所示。
=(,,…,)
(1)
式中,表示作战任务类型空间,表示时刻的作战任务特征向量。
考虑战场态势具有动态、复杂和不确定的特点,这种映射关系无法运用显式的数学公式表示。本文在假设战场环境条件相同和作战任务在提取任务时序特征向量的过程中保持不变的条件下,运用深度学习相关理论构建模型来表示这种映射关系。
2 作战任务智能判识模型
模型主要由两个BiGRU网络层、注意力机制层、先验知识融合与分类层组成。同时,随着网络深度加深,可能会导致模型性能退化和模型训练时难以收敛的问题,引入残差机制防止网络性能退化,引入中间层正则化以解决模型在训练中难以收敛问题,模型结构如图2所示。

图2 模型结构
模型分为4个部分:第1部分为BiGRU层,该层得到输入作战任务的时序特征信息的隐含状态并进行中间层正则化操作;第2部分为残差层,该层引入残差机制将第一部正则化后的隐含状态和该层BiGRU网络输出的状态进行求和;第3部分为注意力机制层,该层运用权重系数对隐含特征的重要程度进行区分;第4部分为先验知识融合与分类层,该层将先验知识融入多层神经网络并实现对作战任务的判识。
2.1 BiGRU层
GRU网络是对LSTM网络的门控机制进行改进的一种变体,与LSTM网络相比,GRU网络结构更加简单,需要训练的参数更少,训练速度更快,GRU网络单元结构如图3所示。

图3 GRU结构

=(+-1+)
(2)
=(+-1+)
(3)

(4)

(5)
其中,、、、、、为权值矩阵,、、为偏置向量。
BiGRU网络由双向GRU网络组成,能运用历史信息和未来信息对网络进行训练,增强网络性能,其结构如图4所示。

图4 BiGRU结构


(6)

(7)

(8)
2.2 残差机制层
为了使模型更好地抽象出输入数据的特征,提升对作战任务判识的准确率,增加了模型隐藏层的数量。但随着网络深度的增加,可能会导致网络性能退化,训练误差增加。为此,引入残差机制防止出现该问题。如图2中残差层所示,残差单元由一个BiGRU网络和直连边组成,其表达式为

(9)
2.3 注意力机制层
注意力机制通过权重系数对输入特征的重要程度进行区分。本文注意力机制层包括短时注意力机制与长时注意力机制,短时注意力机制对当前时刻隐藏层的输出特征进行加权求和,得到当前时间步的特征向量;长时注意力机制对作用于不同时刻的短时注意力机制的输出进行加权求和,得到特征向量。注意力机制的表达式为:

(10)

(11)
=tanh(+)
(12)
为上一层的输出特征;为经过感知机输出的表示;为权重系数;为采用注意力机制后输出的特征向量;为随机初始化向量;为权值矩阵;为偏置向量。
2.4 先验知识融合与分类层
该层将先验知识与多层神经网络输出的结果相融合。计算机兵棋推演重要的功能是模拟作战过程,推演过程中产生的数据蕴含了指挥员的军事知识。先验知识是运用概率理论分析兵棋推演产生的数据,得到的空中目标任务特征中的静态属性(机型、机场)与执行某类作战任务之间的概率值。设任务类别∈{1,2,…,}有个,飞机类型∈{1,2,…,}有个,起飞机场∈{1,2,…,}有个,则类型为的飞机,从机场起飞,执行类任务的次数,执行类任务的概率可通过式(13)计算得到。最终得到的先验知识可表示为=[,,…,],其中,∈{1,2,…,}表示执行类作战任务的概率。

(13)
对于多分类问题,本文给定一个模型隐藏层输入的状态向量,运用Softmax回归判别其属于类别的概率可由式(14)计算得到。最终得到具体形式为=[,,…,],其中,∈{1,2,…,}表示执行类作战任务的概率。

(14)
式中,、分别为需要通过训练来获得的第类任务的权重向量和偏置向量。
先验知识与神经网络输出的融合由式(15)表示:
(=|)=+(1-)
(15)
式中,为超参数。
任务分类可由式(16)表示:

(16)
模型训练时,采用的损失函数为负对数似然函数,并且引入L2正则化,以防止模型过拟合,由式(17)表示。

(17)

3 实验分析
3.1 数据准备
数据准备主要是获得数据样本并对数据样本中的数据进行预处理,最终生成模型所能处理的特征向量。
1)数据样本获取
实验数据样本来源于兵棋推演历史数据,兵棋系统在推演过程中会存储两种数据:第一种是指挥员下达的作战任务指令数据;第二种是兵棋系统模型根据任务指令运行产生的瞬时状态数据。以“空战巡逻”任务指令为例,该指令包括执行任务的机型、机场、巡逻区域和时间等要素,当兵棋系统模型按该指令运行时,会根据指令的要素从相应的机场派遣作战飞机同时解算出飞机瞬时速度、经纬度、高度和航向角等任务特征。通过分析兵棋系统数据库,将指挥体下达的任务指令与任务特征信息进行关联,便得到空中目标执行的任务及对应的特征信息。本次实验从数十场兵棋推演历史数据中抽取24 000个作战任务样本,其中各作战任务占比为转场8.6%、空战巡逻13.6%、预警指挥9%、空中加油3.4%、空中侦察12.5%、电子战10.1%、空中进攻17%、空运11.5%、压制敌防空10.3%、空降4%;对应的任务特征包括机型、起飞机场、飞行速度、高度、经度、纬度、航向角共7维特征;按8∶2划分训练集与测试集。
2)数据预处理
数据样本中的数值型数据具有不同的量纲,会对模型运行结果造成不良影响。因此,采用与文献[6]相同的思路对飞行速度、高度、经度、纬度和航向角这5种数值型特征数据进行归一化处理,某一时刻归一化处理后的数据样本示例如表1所示。归一化处理的表达式如式(18)所示。

表1 部分数据样本示例
(18)
式中,=[1,2,…,](=1,2,…,5)为第种总量为的数值型特征数据,为第个数值型特征数据,max为第种特征数据的最大值,min为第种特征数据的最小值,′为标准化处理后的数据。
3)特征向量生成
将机型、机场这两种非数值型数据进行编码,将编码后的数据与预处理后的数值型数据进行拼接,构建每一时刻输入模型的特征向量如式(19)所示。
=[,,′1,′2,′3,′4,′5]
(19)
式中,为机型,为起飞的机场,′1为飞行速度,′2为高度,′3为经度,′4为维度,′5为航向角。
3.2 评估指标
本文采用平均倒数排名()和前项命中率(@)指标来评估作战任务判识方法的有效性,判识方法的效果与指标的数值大小成正相关关系。向模型输入任务的特征,得到作战任务类型概率排序列表,正确的结果排序位置越靠前,则模型判识的性能越高。是正确的任务在列表中排名的倒数之和的平均值,@是正确任务排在前名所占的比例,计算公式如(20)、(21)所示。

(20)

(21)
式中,表示样本集合;||表示判识样本的个数;表示第个判识样本正确判识结果的排名,如果≤,则()=1,否则()=0。
3.3 实验结果分析
采用全卷积神经网络模型(FCN)、LSTM模型、AM-BiLSTM模型与本文所提的神经网络模型(Our model)、融合先验知识后的模型(Our+Kg model)进行实验对比。在模型训练过程中,使用自适应矩估计(Adam)优化算法并利用网格搜索策略为模型寻找合适的参数大小。训练过程中的损失值变化和实验结果分别如图5和表2所示。

表2 实验结果
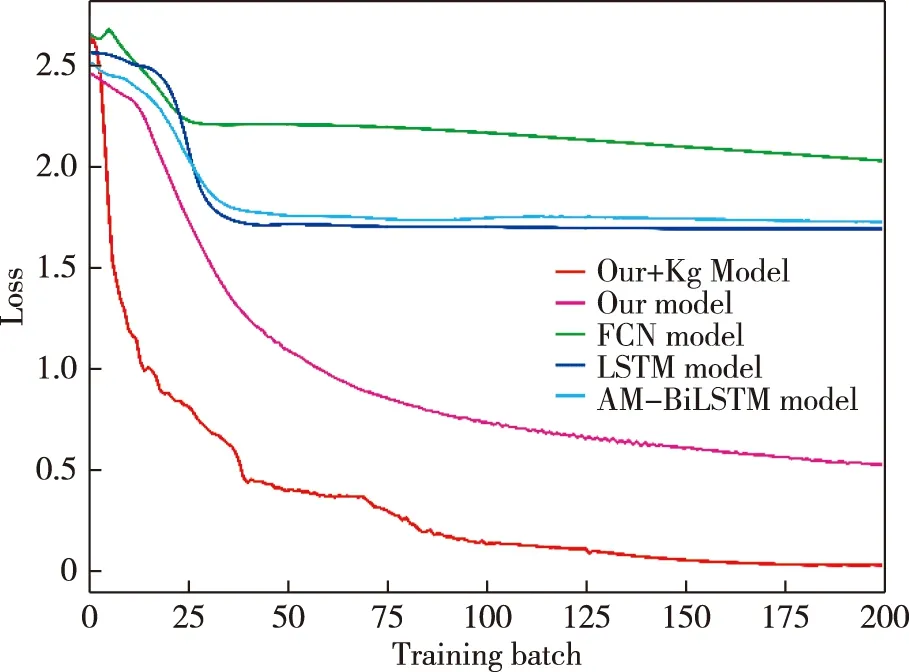
图5 损失值变化情况
从图5可以看出,随着训练轮次的增加,各种算法模型的损失值不断降低,并且最终均可以收敛。LSTM模型损失值均优于FCN模型,说明LSTM可以较好地学习到任务状态间的时序关系,因而提升了性能。AM-BiLSTM模型在LSTM基础上,采用了双向的LSTM网络并引入了注意力机制,既可以更好地学习到任务状态间时序关系,又可以有效捕捉到当前任务状态的重要信息,从而进一步提高了实验的准确性。本文方法所采用的模型经过一段轮次训练后,其损失值便小于其他模型,并且最终损失值远小于其他模型,说明本文构建的由GRU网络、注意力机制和残差机制组成的深层神经网络模型不仅可以更好地对时序特征进行表达,而且能有效地捕捉到任务状态信息,并且在训练过程中,残差机制的作用可以明显体现,降低训练的容错率,使得训练过程中的损失值下降平缓。在模型训练过程中,本文所提的模型由于参数较多,学习速度慢,所以收敛速度较慢,算法代价较大,在实际应用中,可以将训练好的模型参数保存下来,当有新的训练集时,直接加载模型训练好的参数进行训练,可以极大地减少时间的开销,满足任务判识的实时性要求。
从表2中可以看出,在指标上,与其他模型相比,本文所提模型在未融入先验知识时最低提升0017,融入先验知识后,再次提升了0076。在@指标上,当取值为1时,本文所提模型在未融入先验知识时低于LSTM、AM-BiLSTM模型,当融入先验知识后,相比其他模型至少提升了0.03;当分别取值为3和5时,本文所提模型在未融入先验知识时分别最低提升了0.095和0.146,当融入先验知识后,分别再次提升了0.065和0.024。
上述实验结果分析表明,融入先验知识对提升作战任务判识效果具有积极作用,证明了本文所提方法的有效性。
4 结束语
为满足在复杂战场环境下对敌作战任务判识的需要,本文分析了任务判识问题的特点,确定了作战任务空间和任务特征,构建了融合先验知识的作战任务智能判识模型。该模型以BiGRU网络提取任务特征向量的深层次特征,引入注意力机制对隐含特征分配不同权重,采用残差机制确保模型的性能,将先验知识融入该模型进一步提升任务判识的性能。实验表明,对比其他模型,该模型对作战任务的判识具有较高有效性。
