基于ADAMS与MATLAB的平面六杆机构运动分析
2022-06-20詹春晖

摘 要:运用解析法对平面六杆机构进行运动规律分析,通过数学模型建立六杆机构的运动方程,进行位移、速度和加速度的分析。利用MATLAB建立运动分析程序并绘制出运动曲线图。利用ADAMS建立六杆机构虚拟样机进行运动仿真并获得运动参数曲线图,通过分析两者输出的运动参数图像,发现两者的仿真结果具有一致性。并且,使用ADAMS仿真对机构进行运动分析可以提高分析的效率,能精确实现对平面六杆机构的运动学精确分析,这对机械系统的运动方案设计结构的优化具有重要的意义。
关键词:平面六杆机构;运动分析;MATLAB仿真;ADAMS仿真
中国分类号:TP391.9 文献标识码:A文章编号:2096-4706(2022)01-0100-06
Abstract: Analyze the motion rule of plane six-bar mechanism by analytic method, and establish the equation of motion of the six-bar mechanism through the mathematical model, then analyze the displacement, velocity and acceleration. MATLAB is used to establish action analysis procedure and draw the motion curve graphs. ADAMS is used to establish a six- bar mechanism virtual prototype for motion simulation and obtain the motion parameter curve graphs. By analyzing the two deferent motion parameter images, it is found that two deferent results are consistent. Moreover, using ADAMS simulation to analyze the motion of mechanism can improve the efficiency of analysis and realize the accurate kinematic analysis of the plane six-bar mechanism, which is of great significance to the optimization of the scheme design structure of the mechanical system.
Keywords: plane six-bar mechanism; motion analysis; MATLAB simulation; ADAMS simulation
0 引 言
机构运动分析是在给定机构尺度及原动件运动规律时分析机构从动件、各运动副运动规律[1] ,从而分析机构运动性能。无论是对于了解已经存在的机械的运动性能,还是对于创造设计新的机械,机构的运动分析都是十分必要的。可以通过对机构进行速度上的分析,再根据设计要求,来判断从动件的运动规律是否合适。而通过轨迹和位移的分析,可以直观地观察到构件的运动空间轨迹,这能够确定从动件的运动行程,判断某一构件的是否能按设计要求实现预定轨迹和到达预定位置等。也可以观察到机构运动时,是否有构件轨迹上的相互干涉。例如牛头刨床[2,3]在设计时,要求既能提高加工质量,节省动力,同时要把延长刀具寿命和提高效率考虑在内,因此就要求该机器具有急回特性,空载回程速度应该高于工作的进程速度,而且进程速度应该相对稳定,接近与等速。因此,为了判断设计的机器是否满足要求,就有必要对其进行运动分析。
MATLAB是通用数学和工程仿真软件,被誉为巨人肩上的工具,其广泛应用在数理统计、机械设计、自动控制和流体力学等工程领域中,是一款功能强大的工程计算软件,包含众多工具箱,通过强大的图形功能输出数值计算的结果,进行图形显示,高效地求解出复杂的工程问题 [4-7] 。ADAMS是虚拟样机分析软件,是研究机械动力学运动仿真的有效工具,其仿真结果可用于预测机械系统的性能、运动范围等,这对机械系统的设计和优化都具有重要的意义[8-11]。
本文将利用ADAMS与MATLAB对牛头刨床的六杆机构进行运动分析。首先利用ADAMS中的模块建立构件,在构件之间添加运动副,在运动副上添加驱动,建立出牛头刨床六杆机构的模型,并对其进行运动仿真。通过建立六杆机构的位置数学模型,用解析法建立六杆机构的运动方程,进行位移、轨迹、速度和加速度的分析。然后利用MATLAB建立六杆机构的运动分析程序,运行得到运算分析结果,绘制出从动件、运动副的位移、速度和加速度以及角速度、角加速度等的运动曲线图为平面六杆机构的运动学设计提供参考。
1 建立六杆机构模型
本文以牛头刨床平面六杆机构为例,首先对其模型进行简化,可以画出其运动简图,如图1所示,其中曲柄2是原动件,逆时针转动,ω2=172 r/min,且LBE=L2=100 mm;CD是杆件3,是与滑块C相连的导杆,LCD=L3=250 mm;AD是杆件4,是由曲柄2直接带动的摆杆,LAD=L4=400 mm;另外已知的有主动件2到机架的距离LAB=L1=200 mm,滑块C到机架的距离LAF=L5=440 mm。另外,设滑块C到Y轴的位移为M2,滑塊E到A点的距离为M1。
1.1 自由度的计算C942CCEE-3113-4099-BAFE-59898B4F5982
自由度的计算公式为F=3n-(2Pl+Ph),其中n=5为自由构件数,Pl=7为低副数,高副数Ph=0。由此我们可以计算出该机构的自由度为F=3n-(2Pl+Ph)=1。可知,当主动件2的运动参数确定的情况下,该机构有确定的运动输出。可以通过计算得出杆件3、4的角速度,角加速度,以及滑块C的位移、速度和加速度等。
1.2 位移分析
对平面机构进行运动分析的方法主要有解析法和图解法。图解法具有简单和形象直观的优点。但也因此具有精度不高的缺点,特别是当要对机构的一系列位置进行轨迹分析时,就需要反复作图,其工作量是相当大的,也相当的复杂。相对来说,解析法就具有精度高的优点,解析法是通过列方程把机构中已知的运动参数,尺寸参数和位置的运动变量之间的关系表达出来,然后对运动方程进行求解。其缺点是不像图解法那样形象直观,计算公式比较复杂,计算量也比较大,但是由于计算机的普及,计算量的问题得到了解决,因此,现在应用较为广泛的是解析法。本文将利用解析法对该六杆机构进行运动分析,其中包括位移、速度和加速度的分析,也包括角速度和角加速度的分析。除二级杆组可以将位置表达为显函数形式,对于复杂机构该位置方程通常是非线性方程组,所以需利用数值方法求解位置方程。因此,连杆机构的运动分析重点在位置求解。至于速度、加速度方程式则全为线性方程,因而求解较为简单。
对于该六杆机构,由图1我们可以写出如下两个矢量方程:
将两个方程对坐标轴X轴和Y轴投影,我们便可以得到投影方程,如下所示:
联立公式(1)(2)(3)(4),由各个杆件的长度和主动件2的角度θ2都是已知,因此可以求解出滑块C到Y轴的位移量M2,滑块E到A点的距离M1,以及杆件3和杆件4的角度θ3和θ1如下:
1.3 速度分析
速度方程可以由位移方程对时间求导得到,将式(1)(2)(3)(4)对时间求导,并整理得到速度方程如下:
在位移求解的過程中我们已经算得M2、M1、θ3和θ1大小,将速度方程进行整理我们可以得出构件3、4的角速度和滑块C的速度如下:
1.4 加速分析
由速度方程再对时间求导,便可以得到相应的加速度方程,将式(5)(6)(7)(8)对时间求导得到如下的加速度方程:
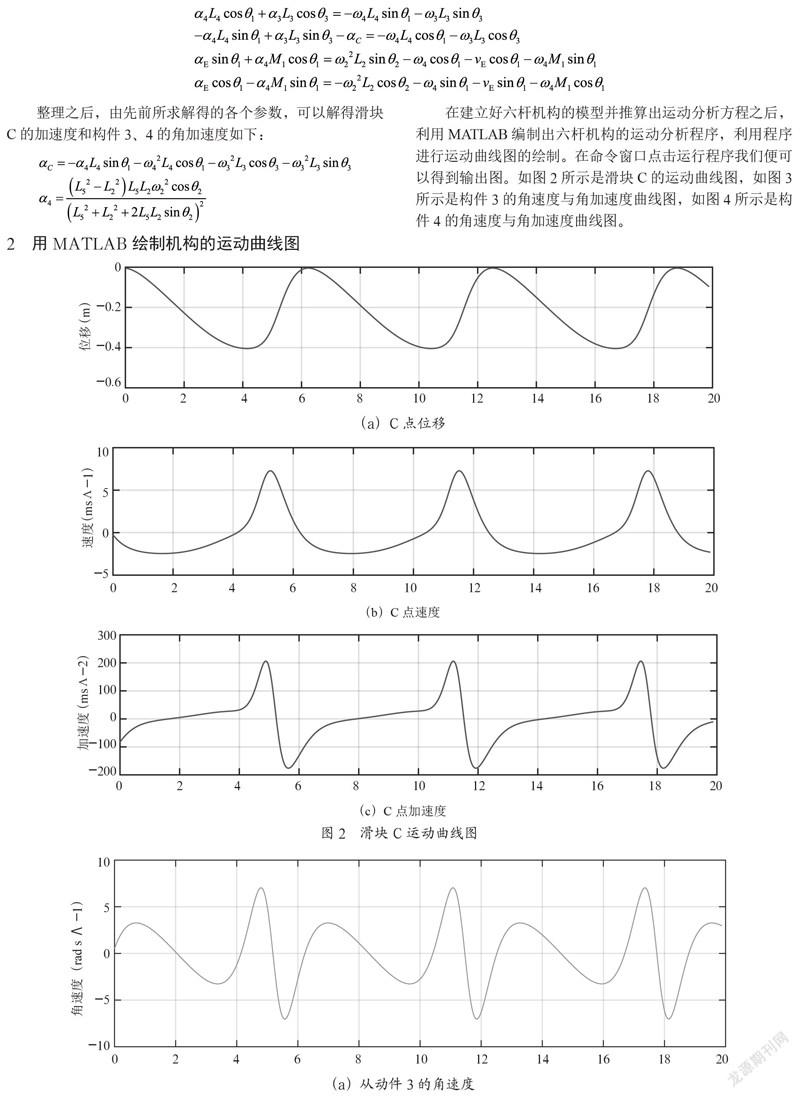
整理之后,由先前所求解得的各个参数,可以解得滑块C的加速度和构件3、4的角加速度如下:
2 用MATLAB绘制机构的运动曲线图
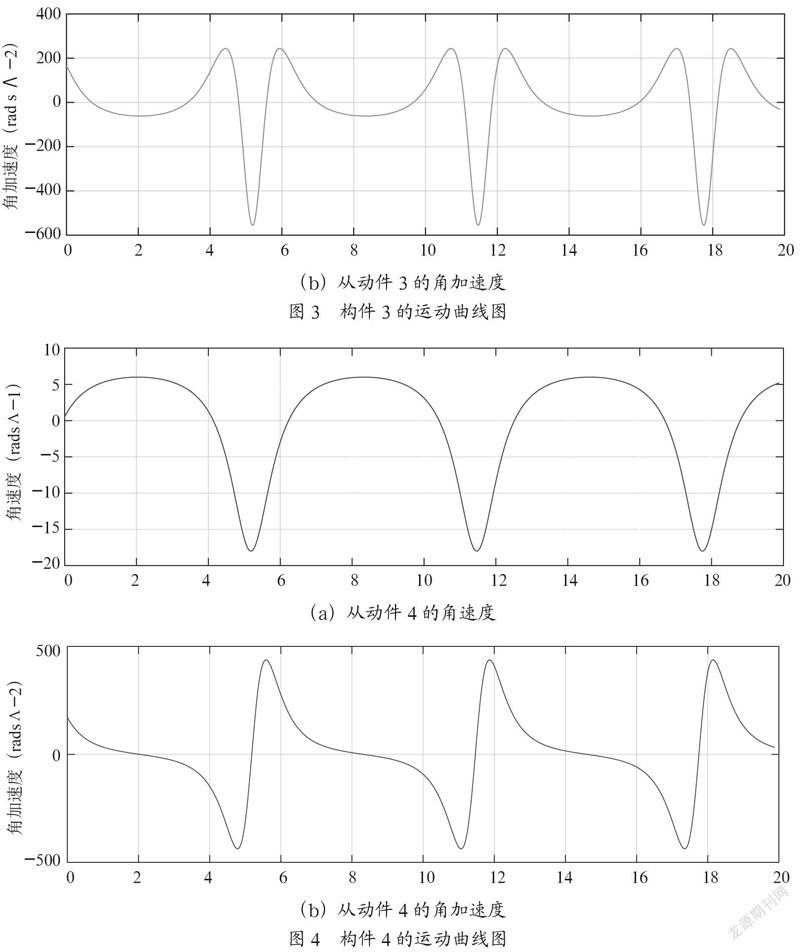
在建立好六杆机构的模型并推算出运动分析方程之后,利用MATLAB编制出六杆机构的运动分析程序,利用程序进行运动曲线图的绘制。在命令窗口点击运行程序我们便可以得到输出图。如图2所示是滑块C的运动曲线图,如图3所示是构件3的角速度与角加速度曲线图,如图4所示是构件4的角速度与角加速度曲线图。
3 运用ADAMS对机构进行建模与仿真
3.1 建立机构的ADAMS模型
在Adams软件中,点击Link模块,在框图中输入构件的参数,可以完成构件2的建立,同理可以建立导杆3、摆杆4,以及滑块C和滑块E等构件。
完成构件的建立之后,进行添加构件之间的连接。在Adams软件中点击连接模块,分别在曲柄2与地面、曲柄2与滑块E、摇杆4与地面、摇杆4与摇杆3、摇杆3与滑块C之间添加转动副;在摇杆4与滑块E、地面与滑块C之间添加移动副。
完成了机构所需的运动副的添加之后,再添加驱动。在曲柄2上的转动副上添加上旋转驱动,设置驱动的函数为速度为57 d*time,点击完成。此时六杆机构的建模便完成了,完整的模型如图5所示。
3.2 运动仿真分析
在保存模型之后,点击仿真模块,进行仿真设置,将仿真时间设置为20秒,步数设置为640,如图6所示。仿真开始之后,将可以在界面中直接观察到模型的运动动画,待仿真结束后,将仿真结束进行绘图,便可以得到整个模型中各个构件的运动分析曲线图,我们将构件3、4的角速度、角加速度和滑块C的位移、速度和加速度的图像输出,如图7、图8所示。
通过对位移图的分析,我们可将在时间0 s~4 s的区间内机构的运动称为进程,在4 s~6 s之间机构的运动称为回程。而且由图4可知,当t=0 s 时达到最小值,当t=4 s 时达到最大值,当t 在0 s~4 s的区间内,位移与时间基本呈线性关系,说明速度变化平稳,这一点在速度曲线图中也可以看出来。而当t=6 s时,滑块C 又回到了初始位置点,并且在t=4 s~6s 区间内,速度曲线变化很快,在1 s内快速从0 增长到极值点,又在1 s内快速变为0,而且速度的峰值接近进程区间时的3 倍。在加速度曲线图中也可以看出在进程区间内加速度的变化趋于平稳,而在回程区间内加速度在2 s 的时间内极速变化了三次。这正是该机构的急回特性,很明显可以得出回程时间是进程的1/2,进而计算得行程速度变化系数K=v进/v回=2。因为该机构进程时是在对外做功的,而回程是空载的,因此机构需要得到更长的进程时间,而回程则需要尽快地完成,通过运动分析我们发现该机构符合这样的设计要求。另外,通过与MATLAB 图像输出进行对比我们发现,两者的结果具有一致性。这说明两者的运动分析都是正确的。
构件4是直接与主动件连接的杆件,如图9所示是构件4的角速度曲线图,如图10所示是构件4的角加速度曲线图。从图中可以看出,在进程的时间区间0 s~4 s内,角速度和角加速度的变化都较为平稳,且极值都相对较小;而在回程的时间区间4 s~6 s内,角速度和角加速度都有突变的发生,变化很大,而且极值相对较大。这样的变化正是因为该机构的急回特性,在构件4的运动中也得到了体现。C942CCEE-3113-4099-BAFE-59898B4F5982
构件3是直滑块C连接的杆件,如图11所示是构件3的角速度曲线图,如图12所示是构件3的角加速度曲线图。在分析这两个图时我们会发现无论是角速度曲线角加速度曲线,都比构件4更加复杂。但仔细分析后不难发现该机构的急回特性仍然在构件3的运动中体现了出来。在进程的时间区间0 s~4 s内,角速度和角加速度的变化虽然复杂,有较小的拐角,但都较为平稳,且极值都相对较小;而在回程的时间区间4 s~6 s内,角速度和角加速度都有突变的发生,变化很大,而且极值相对较大。
4 结 论
通过将ADAMS软件仿真结果与MATLAB图像输出进行对比我们发现,两者的结果具有一致性。这就说明,两者的运动分析结果都是正确的。两者都实现了六杆机构的运动分析,并且相互验证了正确性和有效性,既证明了利用ADAMS仿真进行运动分析的正确性,也证明了数学模型的建立和利用MATLAB编程求解运动规律的正确性。与此同时,我们会发现,运用ADAMS实现机构的运动仿真比用MATLAB编程绘图更加方便,而且ADAMS仿真过程中可以输出机构运动动画,可以更加直观地观察到机构运动过程。相对用复杂的解析法推算运动方程,然后运用MATLAB來编程绘制出运动曲线图,运用仿真的方法省去了较为烦琐的模型建立,矢量方程的计算等步骤,仿真结果不易出错直观性强,相对计算量较小,更具有一定的工程实际意义。对于复杂的机械系统来说,有时候矢量方程的建立特别烦琐,编程也就特别的复杂。此时,运用ADAMS进行运动分析,就会更加高效,能为工程师节省时间,具有更强的工程实际意义,同时这对机械系统的设计和优化都具有特别重要的理论意义。
参考文献:
[1] 于靖军.机械原理 [M].北京:机械工业出版社,2013.
[2] 徐金明.MATLAB实用教程 [M].北京:清华大学出版社,2005.
[3] 陈怀琛.MATLAB及其在理工课程中的应用指南 [M].西安:西安电子科技大学出版社,2007.
[4] 管西巧,赵庆志,高跃武,等.基于Solidworks和ADAMS的牛头刨床导杆机构仿真分析 [J].煤矿机械,2014,35(10):273-275.
[5] 王延龙,文学洙.牛头刨床六杆机构的运动分析和优化方法 [J].机械工程师,2016(2):98-99.
[6] 季佳俊.基于MATLAB的牛头刨床机构运动分析 [J].时代农机,2020,47(1):112-114.
[7] 张森,张正亮.MATLAB仿真技术与实例应用教程 [M].北京:机械工业出版社,2004.
[8] 杨春辉.基于MATLAB的平面六杆机构运动分析 [J].重庆科技学院学报(自然科学版),2008(1):55-57.
[9] 赵玉成,顿文涛,李勉,等.基于Pro/E的牛头刨床六杆机构的动态仿真分析 [J].河南农业大学学报,2014,48(1):66-70.
[10] 刘文龙,苏丹,刘明涛.基于Matlab与C语言联合对牛头刨床机构的优化研究 [J].河南工程学院学报(自然科学版),2015,27(3):45-51.
[11] 管锋,周传喜,喻久港.基于VB的牛头刨床六杆机构参数化设计及运动分析 [J].长江大学学报(自然科学版),2012,9(12):149-151+6.
作者简介:詹春晖(1995—),男,汉族,江西婺源人,硕士研究生在读,研究方向:计算机辅助工程。C942CCEE-3113-4099-BAFE-59898B4F5982
