一类具有恐惧效应的Holling-Ⅲ类时滞捕食系统
2022-06-17张子振张伟诗
张子振, 张伟诗
(安徽财经大学 管理科学与工程学院,安徽 蚌埠 233030)
0 引言
捕食者-食饵系统在现实世界中是一种非常普及的系统.为了揭示捕食者与食饵之间的动力学关系,在过去的几十年中,生物数学界学者对许多捕食者-食饵系统进行了研究,尤其是在两种群捕食系统方面取得了丰富的成果[1-5].2011年,Zanette等[6]研究发现,歌雀由于受到捕食者的惊吓导致繁殖率降低了40%.为了更好地描述环境因素对捕食系统的影响,Wang等[7]首次提出了一类具有恐惧效应的捕食系统.随后,具有恐惧效应的捕食系统受到国内外学者的关注[8-11].考虑到不同形式的功能反应对捕食系统的动力学行为的影响,韩梦洁等[12]提出了具有恐惧效应的Holling-Ⅲ类捕食系统
(1)

显然,捕食者种群捕获食饵种群后,须经过一个妊娠周期才能达到数量上的增长.因此,本文在系统(1)的基础上,考虑捕食者种群的妊娠时滞,研究如下时滞捕食系统:
(2)
其中τ为捕食者种群的妊娠时滞.
1 正平衡点的局部渐近稳定性和Hopf分岔的存在性

λ2+Υ1λ+Υ0+(Θ1λ+Θ0)e-λτ=0,
(3)

λ2+(Υ1+Θ1)λ+Υ0+Θ0=0.
(4)
当τ>0时,假设λ=iω(ω>0)为方程(4)的根,则有
(5)
进而有
(6)
令ω2=χ,则方程(6)变为
(7)

定理1当τ∈[0,τ0)时,系统(2)局部渐近稳定;当τ=τ0时,系统(2)在E*(x*,y*)处产生Hopf分岔,并产生一簇分岔周期解.
2 分岔周期解的方向和稳定性
(8)
其中X(t)=(X1(t),X2(t))T∈C,且
F(ζ,X(t))=(τ0+ζ)(F1,F2),



η(θ,ζ)=(τ0+ζ)(U1δ(θ)+U2δ(θ+1)),
其中,δ(θ)是狄拉克函数.定义

及

(9)

其中


且
进而得到确定分岔周期解的方向和稳定性的系数
(10)
定理2对于系统(2),当Γ1>0时,Hopf分岔是超临界的,否则,Hopf分岔是次临界的;当Γ2>0时,分岔周期解是不稳定的,否则,分岔周期解是稳定的.
3 仿真示例
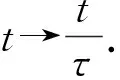
在系统(2)中,选取r=0.6,K=0.1,d1=0.01,d2=0.011,a=0.1,b=0.47,c=0.5,m=0.045,计算得系统的唯一正平衡点为E*(1.248 9,5.162 0),进而得到ω0=0.626 6,τ0=3.058 9.由定理1可知,当τ∈[0,3.058 9)时,系统局部渐近稳定,仿真效果如图1所示.当τ0>3.058 9时,系统不稳定,并在E*(1.248 9,5.162 0)处产生Hopf分岔,仿真效果如图2所示.另外,计算得λ′(τ0)=1.007 4-0.809 1i,C1(0)=-0.250 7+0.906 4i.根据公式(10),Γ1=0.248 8,Γ2=-0.501 4.由定理2可知,系统在τ0=3.058 9处产生的Hopf分岔是超临界的,并且是稳定的.
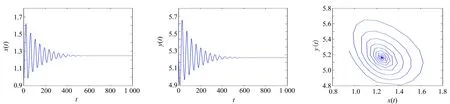
图1 当τ=2.587 7∈[0,3.058 9)时,系统局部渐近稳定Fig.1 The system is locally asymptotically stable when τ=2.587 7∈[0,3.058 9)
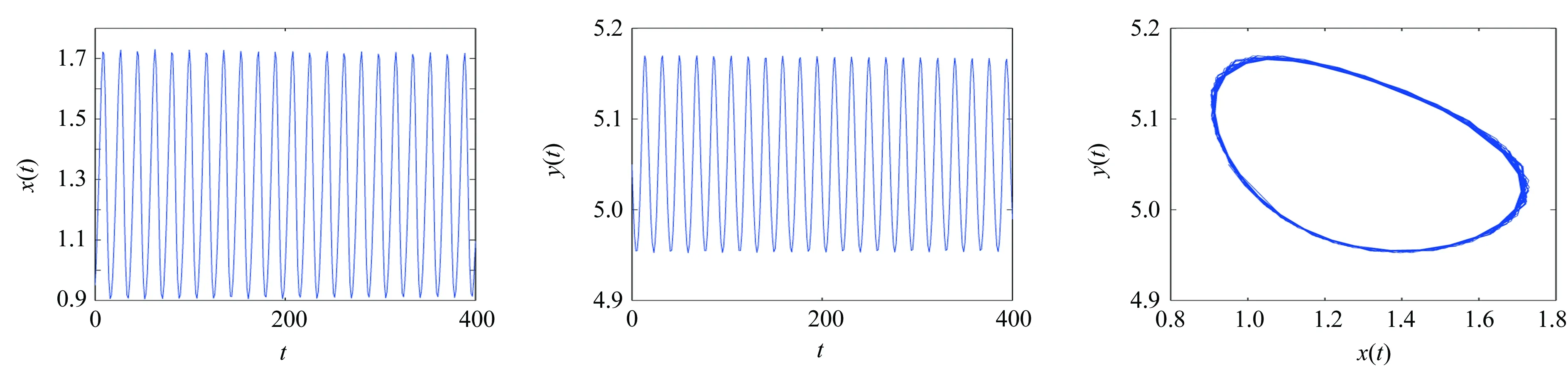
图2 当τ=3.424 8>τ0=3.058 9时,系统不稳定且产生Hopf分岔Fig.2 The system is unstabe and with Hopf bifurcation when τ=3.424 8>τ0=3.058 9
4 小结
本文考虑捕食者种群的妊娠时滞,研究了一类具有恐惧效应的Holling-Ⅲ类时滞捕食系统.以捕食者种群的妊娠时滞为分岔参数,推导出系统局部渐近稳定和产生Hopf分岔的充分条件,并计算出系统产生Hopf分岔的时滞临界值.研究表明,在一定条件下,当时滞τ∈[0,τ0)时,系统中的食饵种群和捕食者种群的数量趋于正平衡点,系统处于理想的稳定状态.当时滞τ越过临界值τ0时,系统失去稳定并产生Hopf分岔,食饵种群和捕食者种群的数量处于周期震荡状态,不利于自然资源的合理开发利用.此外,本文还利用中心流形定理和规范型理论研究了系统在τ=τ0处产生Hopf分岔的方向和分岔周期解的稳定性.
