直流微电网双向AC/DC变换器鲁棒前馈控制策略研究
2022-06-16吴博宁
王 新,许 翔,吴博宁,黄 冲
(河南理工大学 物理与电子信息学院,河南 焦作 454000)
国内外研究表明,相比于交流微电网,直流微电网在分布式电源的消纳、系统可控性、经济性以及供电质量方面的性能更优越[1-4]。抑制直流微电网母线电压波动,保证系统稳定运行,是直流微电网领域研究的热点问题[5-6]。当直流微电网与交流电网相连时,往往是通过优化三相(Alternating Current/Direct Current,AC/DC)双向变换器的控制系统来控制母线电压。在对变换器进行建模和控制时,变换器所带负荷通常是复杂多变的,输入侧电阻、电感、电容参数是不能精确测量的,而且随着时间推移,这些参数还会出现一定程度的老化,存在参数波动[7]。因此,要保证直流微电网母线电压恒定,就需要控制器对时变负载具有良好的鲁棒性。
线性扩张状态观测器(Linear Extended State Observer,LESO)作为线性自抗扰控制的核心,能在被控对象数学模型未知的情况下,实现对系统各状态变量及总扰动的实时跟踪,并通过扰动补偿环节来对系统的总扰动进行近似补偿。这在结构上等效于对系统施加了前馈控制,能够有效提高系统的动态性能。目前,该项技术已经在变流器系统以及空间光通信的实际工程应用中得到了广泛的研究和应用[8-11]。
滑模控制是一种典型的非线性控制方法。滑模控制不依赖于被控对象精确的数学模型,对负载以及波动具有较强的鲁棒性。利用滑模控制器可提高系统对参数摄动的不敏感性, 增强控制系统的抗干扰性能[12-13]。
本文根据直流微电网三相AC/DC变换器的数学模型,将LESO和滑模理论结合,提出了一种基于LESO和滑模理论的前馈鲁棒控制策略。首先,利用LESO来对系统的状态变量和总扰动进行实时观测;然后,将观测值用于滑模控制器的设计;最后,通过仿真分析验证了该控制策略的有效性。
1 直流微电网三相AC/DC变换器数学模型
直流微电网三相AC/DC变换器的电路拓扑如图1所示。为了得到更加简明的三相AC/DC变换器数学模型,本文结合实际的电力系统,作如下假设:(1)交流系统是一个对称的三相系统;(2)功率开关无过渡过程、无功率损耗、无死区效应。
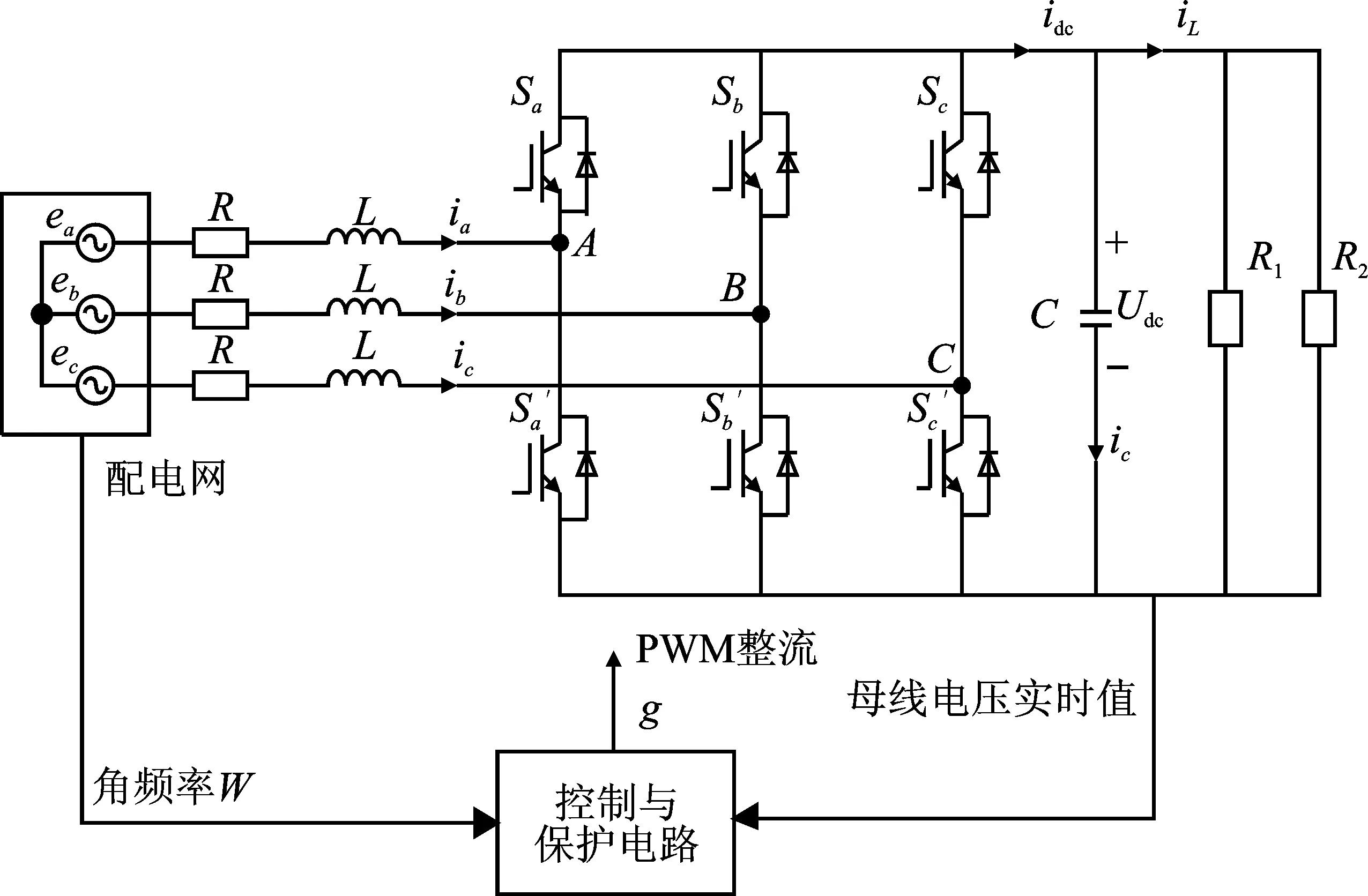
图1 AC/DC变换器电路拓扑Figure 1. AC/DC converter circuit topology
图1中,ea、eb、ec、为等效的三相交流电源,ia、ib、ic为交流侧线路电流,R为线路等效电阻,L为线路等效电感,C为直流侧滤波器电容,Udc为直流侧电容器两端电压,idc为直流侧两端电流,ic为流过电容器两端的电流,IL是流经负载两端的电流,RL是直流微电网的等效负荷。
根据直流微电网三相AC/DC变换器的电路拓扑图,由基尔霍夫定律可得三相AC/DC变换器在a、b、c三相静止坐标系下的数学模型为
(1)
(2)
其中,Si如式(3)所示。
(3)
采用恒幅值坐标变换,三相静止坐标系到两相旋转坐标系变换的矩阵为
(4)
其中,θ为d轴与a轴的夹角。
联立式(1)~式(4)可得三相AC/DC变换器在二维旋转坐标系下的数学模型为
(5)
(6)
式(6)两边同时对时间求导,联立式(5)可得
(7)
式中,ed、eq、id、iq、Sd、Sq为三相AC/DC变换器交流侧电压矢量、电流矢量、开关函数在旋转坐标系d-q轴上的分量。由式(7)可知,可将直流微电网三相AC/DC变换器看作是一个二阶系统。
2 线性扩张状态观测器的引入
LESO是线性自抗扰控制技术的核心,其不依赖被控对象精确的数学模型就能够实现对系统各状态变量和总扰动的跟踪。对于具有外部干扰的n阶系统有

(8)
式中,y为系统输出;u为系统输入;w为未知外扰;a0,a1,…,an-1为系为系统统结构参数,可能未知或部分已知;b为控制器增益。

(9)
其中
(10)
上述系统的状态变量可由下列状态观测器估计
(11)


(12)
文献[10]引入了观测器的带宽,通过极点配置的方法来确定误差反馈增益的大小

(13)
式中,l1,l2,…,ln为观测器的误差反馈系数;ω0是观测器的带宽。根据恒等式的性质,可以通过式(14)来确定矩阵L中的各元素。
(14)
当系统渐近稳定时,系统的状态变量可由观测器的状态变量跟踪,即
(15)
引入观测器带宽后,LESO原来对误差反馈系数l的整定变成了对参数ω0的选取,简化了LESO的设计。同时也表明参数ω0决定着LESO的跟踪性能,ω0越大,LESO的跟踪效果越好,控制精度越高[14-15]。但实际系统往往存在噪声,过大的ω0将会放大噪声,影响系统的控制效果。
3 基于LESO和滑模理论的前馈鲁棒控制器设计
3.1 基于双向AC/DC变换器数学模型的三阶LESO设计
当双向AC/DC变换器采用电压定向控制策略时可得
(16)
式中,Urms为交流侧电压矢量的最大有效值。
将式(16)代入式(7)可得式(17)。
(17)
将系统的总扰动扩张为一个新的状态变量,则重构后的系统状态空间为
(18)
式中,b0=3ω/2c;状态变量z1和z2用以跟踪母线电压及其导数;z3=f是系统的总扰动,其中
(19)
根据上述介绍可得三相AC/DC变换器的LESO模型为式(20)。
(20)
3.2 基于LESO的滑模控制器设计
为确保直流微电网母线电压具有良好的动态品质,本文将母线电压的偏差信号以及微分信号作为滑模函数的状态变量。
选取滑模函数为
(21)
根据霍尔维茨稳定性判据,只需要c>0,系统就是大范围渐近稳定的。
式(21)中的变量计算式为
(22)
其中,Udcr为额定母线电压;Udc为母线电压实时值。
将电压误差的微分信号再次求导可得
(23)
由式(20)可知
(24)
为抑制滑模控制的抖振,确保状态变量能够在有限的时间内收敛到滑模面,采用指数趋近率来设计滑模控制器。具体表达式如式(25)所示。

(25)
式中,ε是系统状态变量趋向滑模面的速度,系统由初始状态收敛到滑模面所需要的时间就很长,若ε值太大,状态变量会在切换面上产生明显的抖动;k是指数逼近项系数,k值过小,系统状态变量从初始位置收敛到滑模面的时间会缩短,同时会减小“滑动模态”存在的区域[16-17]。为了达到良好的控制效果,在参数整定上,如果ε增大,则需要减小k值[18-21]。
联立式(21)~式(25)可得系统控制率如式(26)所示。
(26)


图2 滑膜控制器结构框图Figure 2. Block diagram of sliding mode structure
4 仿真分析
为验证所提控制策略的有效性与实用性,在MATLAB/Simulink中搭建了一个如图1所示的直流微电网系统。其中,交流侧线电压有效值为380 V,频率为50 Hz。开关频率为6 kHz,采样周期为1×10-5s。系统参数如表1所示,自抗扰控制器参数如表2所示,PI控制器参数如表3所示。

表1 系统参数

表2 滑模自抗扰控制器系统参数Table 2. System parameters of sliding mode active disturbance rejection controller

表3 电压/电流控制器系统参数Table 3. Voltage/current controller system parameters
图3为电压外环采用PI控制器时的网侧a相相电流和相电压波形图,图4为电压外环采用本文所提出的控制策略的电网侧a相相电流和相电压波形图。从图3和图4可知,当系统稳定时,PI控制器和本文所提控制策略都能保证双向AC/DC变换器实现单位功率整流,这也是二者能够应用于双向AC/DC变换器的前提条件。

图3 PI控制下的a相电流电压波形图Figure 3. The a-phase current and voltage waveform under PI control
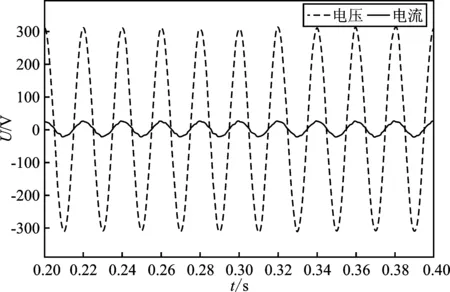
图4 本文控制策略下的a相电流电压波形图Figure 4. The a-phase current and voltage waveform under the proposed control strategy
图5和图6为电压外环采用本文所提控制策略和PI控制器时网侧a相相电流在稳态时的谐波畸变率。采用本文所提控制策略的谐波畸变率为7.85%,采用PI控制器的谐波畸变率为8.86%。综上可知,采用本文所提控制策略对交流侧具有更小的谐波影响。
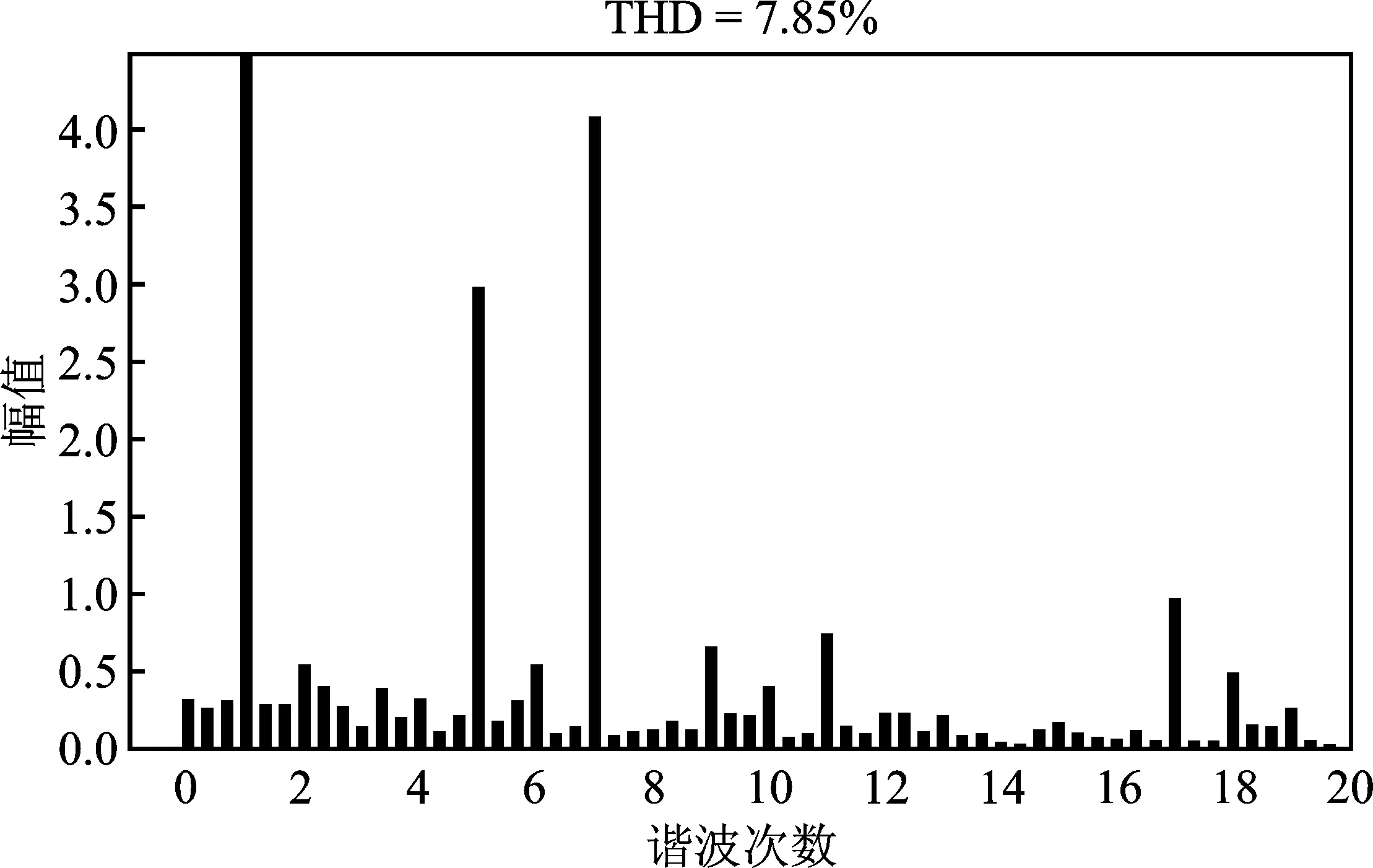
图5 本文所提控制策略的a相谐波畸变率Figure 5. The a-phase harmonic distortion rate of the proposed control strategy
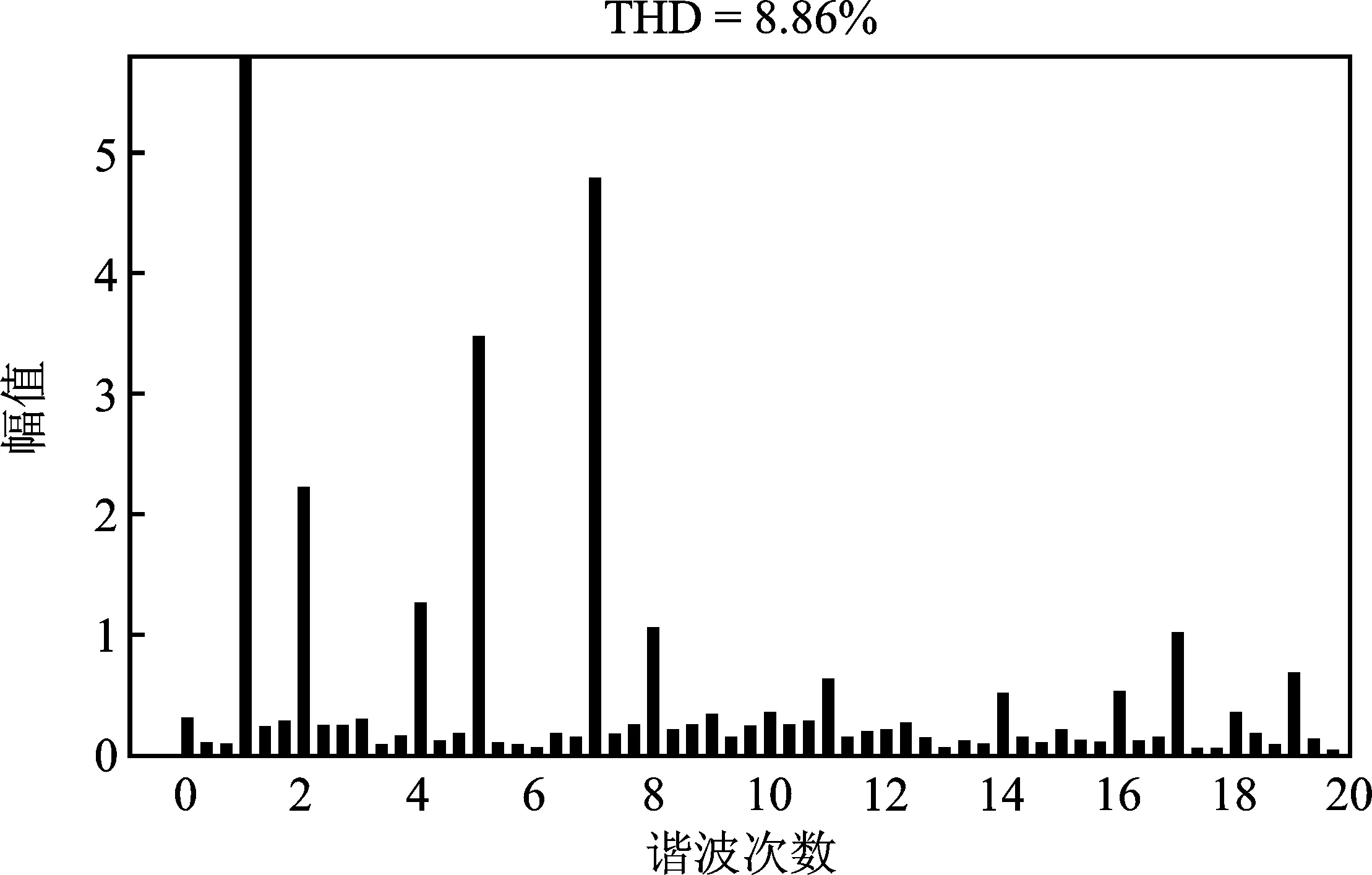
图6 PI控制器下的a相谐波畸变率Figure 6. The a-phase harmonic distortion rate under PI controller
图7为系统稳态时的母线电压波形图。由图7可知,本文所提前馈鲁棒控制策略下的微电网母线电压对比PI控制下的母线电压波动更小,具有更好的稳态特性。
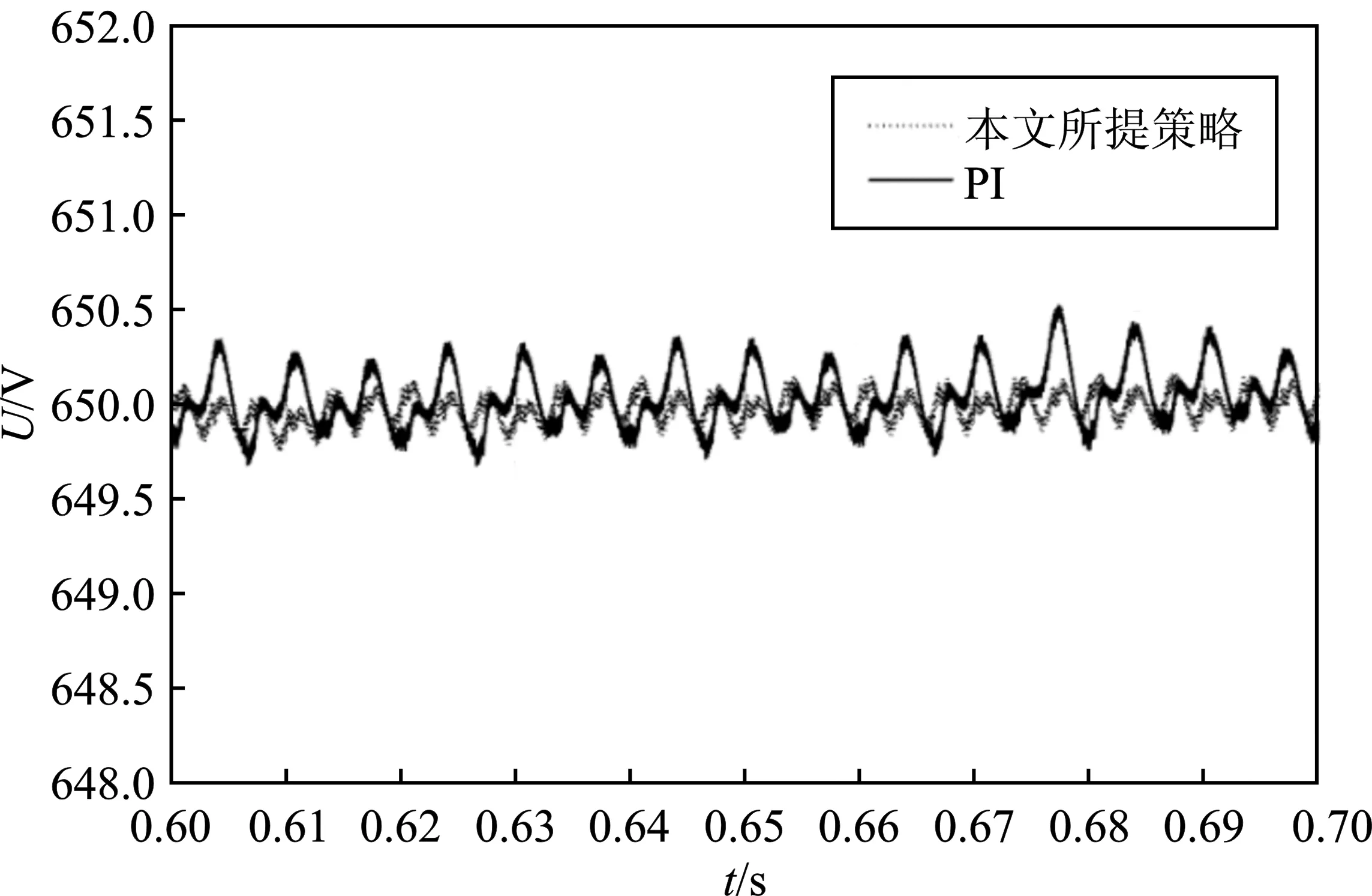
图7 稳态微电网母线电压波形图Figure 7. Bus voltage waveform of steady-state microgrid
图8为负载波动时的母线电压波形图,由图可知,当负载骤变时,鲁棒前馈控制器控制下的电压跌落更小,过渡过程时间更短,具有更加优良的暂态性能。
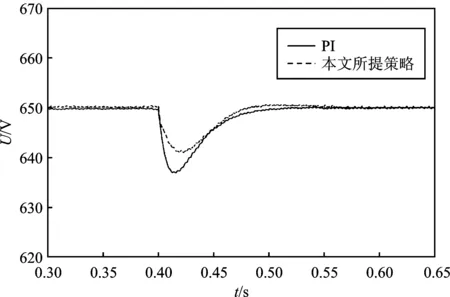
图8 负载突变时的母线电压波形图Figure 8. Bus voltage waveform under load mutation
5 结束语
本文根据直流微电网三相AC/DC双向变换器的数学模型设计了一种鲁棒前馈控制器。通过LESO和扰动补偿环节来对系统的内外扰动进行动态补偿,提高了系统的动态性能。最后,不同工况的仿真实验表明,相比于PI控制器,本文所提控制策略不仅能保证三相AC/DC变换器具有良好的稳态性能,还能提高系统的动态品质与抗扰能力。
