车辆通过减速带时的动力学特性仿真分析
2022-06-16王红艳谢金乘张育玮苗凤娟
王红艳,谢金乘,张育玮,苗凤娟
车辆通过减速带时的动力学特性仿真分析
王红艳1,谢金乘1,张育玮1,苗凤娟2
(1.齐齐哈尔大学 机电工程学院,黑龙江 齐齐哈尔 161006;2.齐齐哈尔大学 通信与电子工程学院,黑龙江 齐齐哈尔 161006)
研究了汽车通过减速带时的车速及减速带尺寸对其行驶平顺性能的影响。在MATLAB软件中利用SimMechanics模块建立了1/2车辆系统简化模型,利用Simulink模块建立了减速带和路面激励模型,通过联合仿真分析获得了汽车以不同车速通过减速带时的车身垂向加速度和俯仰角加速度。结果表明,相比于路面激励,汽车通过减速带时的车身垂向加速度和俯仰角加速度明显升高,行驶平顺性下降。车速低于4.5m/s时,减小减速带宽度可以提高行车控速效果;车速高于5.5m/s时,增加减速带宽度可以提高行车控速效果。
减速带激励;路面激励;汽车;动力学性能;SimMechanics;Simulink
随着经济社会的快速发展,汽车的使用更加普及,人们不仅仅只满足于汽车发明初期代步工具的作用,渐渐开始注重汽车操纵稳定性和行驶平顺性[1,2]。当汽车通过减速带时会产生机械振动,这种振动会通过轮胎和悬架等弹性阻尼元件传递到人体,使人产生不舒服的感觉[3,4]。为了研究汽车通过减速带时的平顺性能,本文首先在MATLAB软件中利用SimMechanics模块建立1/2车辆系统简化模型,并利用Simulink模块建立减速带和路面激励模型,然后对减速带-路面-车辆模型进行联合仿真,研究车速和减速带尺寸对车身垂向加速度和俯仰角加速度的影响,为评价汽车过减速带时的行车平顺性能提供依据。
1 减速带-车辆系统仿真模型
1.1 车辆系统模型
图1所示为1/2车辆系统简化模型。图1中,1和2分别为前、后车轮质量,k和k分别为前、后车轮的等效刚度,k和k分别为前、后悬架刚度。1和2分别为前、后悬架阻尼系数。为车身绕质心转动惯量,为车身绕其质心的旋转角度。为前轮与车身质心间的距离;为后轮与车身质心间的距离。
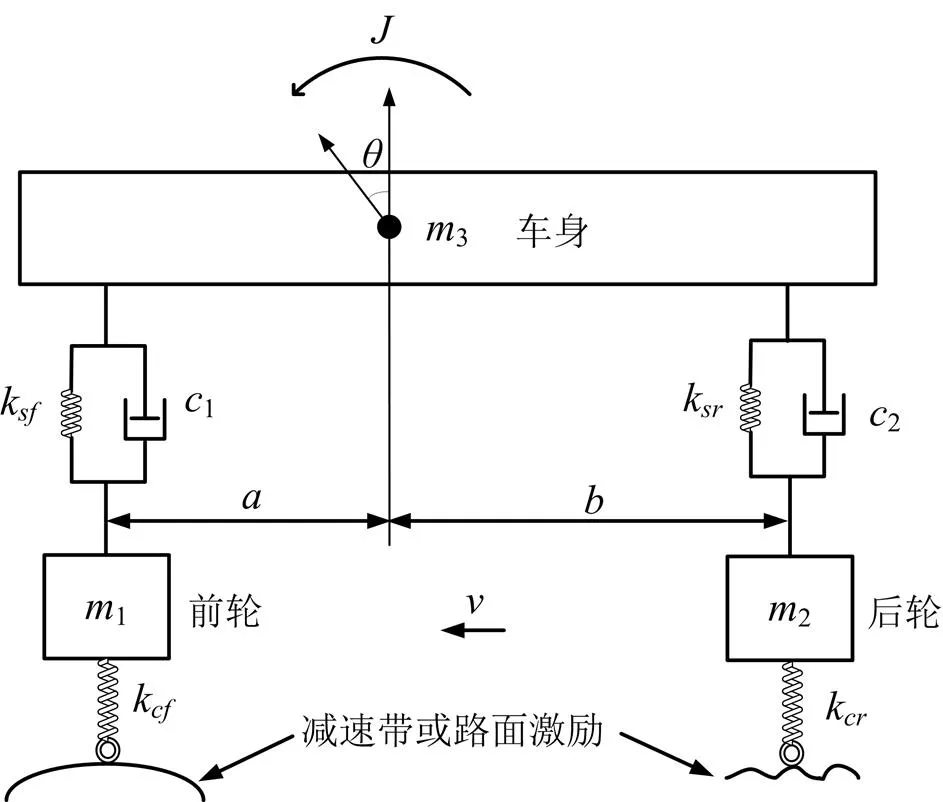
图1 1/2车辆系统简化模型
图2所示为基于SimMechanics的车辆系统物理模型。框1中的三个模块分别为解决配置模块(Solver Configuration)、世界坐标系模块(World Frame)和机构配置模块(Mechanism Configuration)。其中,Solver Configuration模块为后面参数设置提供平台。World Frame模块确定了物理模型的基准坐标系以及坐标原点,后面所有的物理坐标均以此为参考。Mechanism Configuration模块使后面各个刚体之间的连接副得以实现建模。框2和框3所示分别为前、后车轮与减速带及与车身的连接。框2和框3中,前、后车轮与减速带的接触采用刚体模块(前轮接触SYT_ZQ,后轮接触SYT_ZH)进行模拟。前、后车轮与悬架的连接采用刚体模块(前车轮CL_ZQ,后车轮CL_ZH)。车轮和减速带接触面之间放置了一个六自由度模块(LT_ZQ)和一个角度限制模块(Angle Constraint),由此确定前轮和后轮的平面位置。在接触刚体左侧,激励信号(In1)通过信号转换器(Simulink Ps Converter)和移动副(Prismastic Joint)输入到系统中。框4所示为车轮与车身之间的连接模块。移动副和转动副(Sphenical Joint)用来实现车身相对于车轮的上下运动和转动。其中,移动副主要模拟悬架的弹簧和减振器。刚体之间的相对运动通过相对坐标系(Rigid Transform)实现。
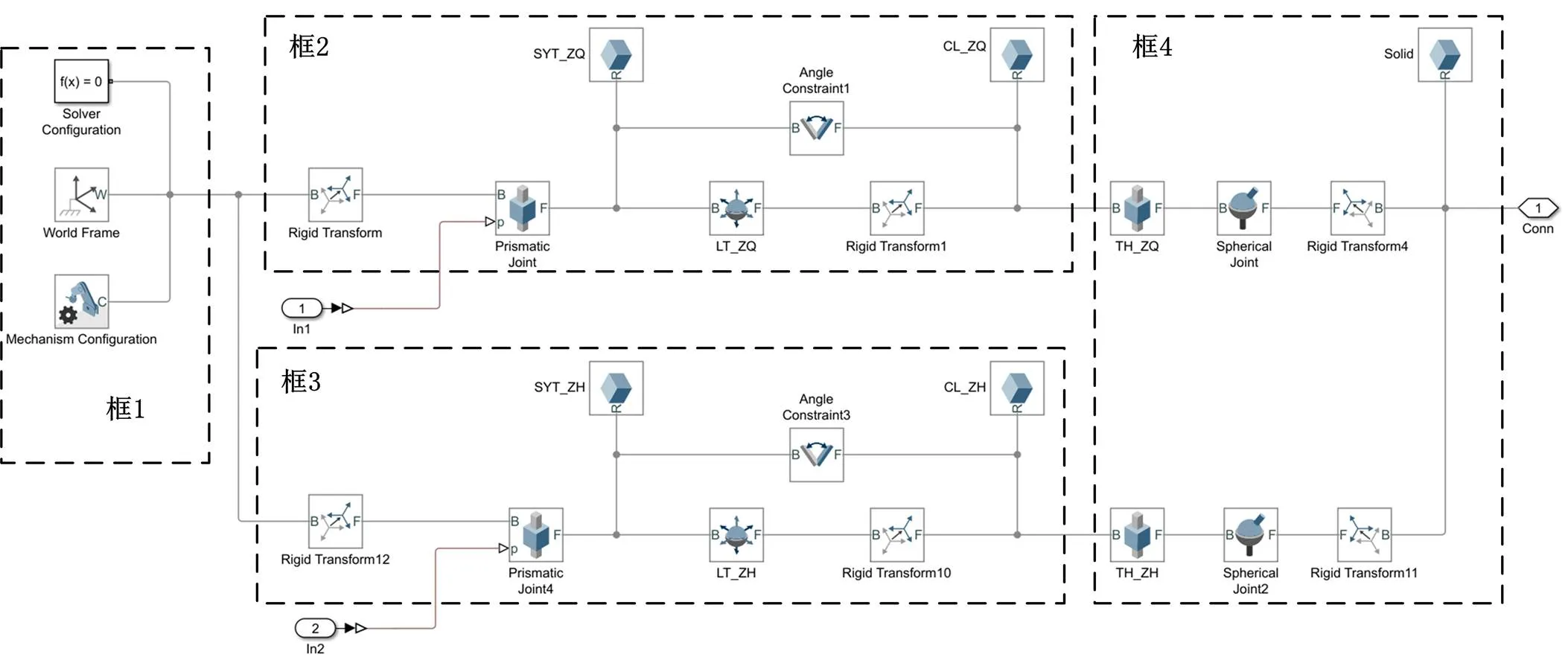
图2 SimMechanics车辆系统物理模型
1.2 减速带模型
减速带的截面形状主要有梯形和椭圆形两种[5]。本文以椭圆形截面形状的减速带为研究对象,如图3所示,减速带宽度为,高度为。假设减速带高度远小于减速带宽度,减速带横截面可看作一个1/2周期的正弦波形[6],则有公式
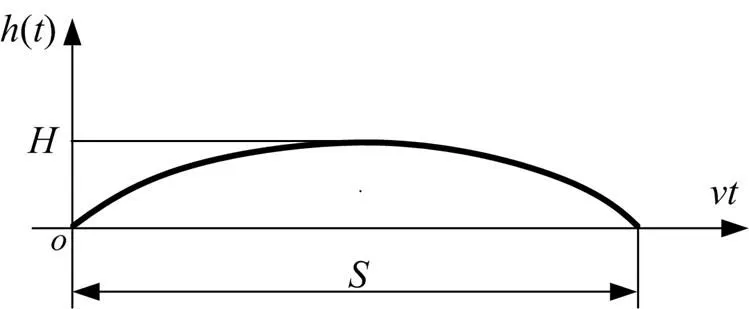
图3 减速带截面图
式中,()—减速带纵向激励位移;—汽车过减速带时的行驶速度;—行驶时间。
图4所示为在Matlab软件simulink模块搭建的减速带激励模型。图4中,时间变量用时钟(Clock)定义,在时钟模块后连接一个延时模块1,用于控制汽车从何时开始过减速带。
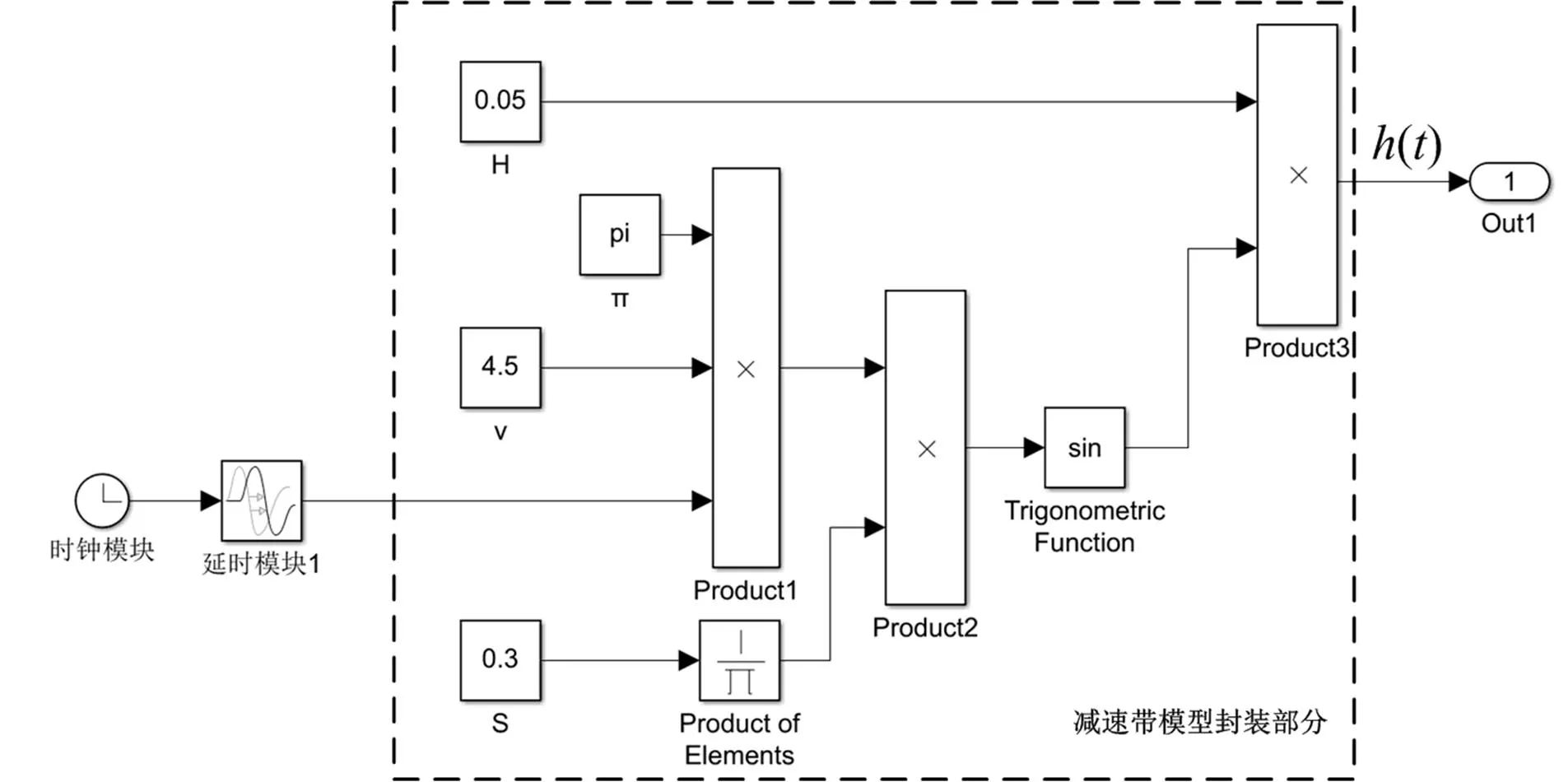
图4 减速带激励模型
1.3 路面模型
根据文献[7],路面不平度时域模型可表达为

式中,q(t)—路面不平度位移输入;ω0(t)—协方差为1m2/s的单位白噪声;Gq(n0)—路面不平度系数,n0为参考空间频率,n0=0.1m-1;B级路面Gq(n0)=64×10-6 m3。图5所示为根据式(2)在Simulink中搭建的路面激励模型。
1.4 减速带-路面激励模型和车辆模型连接及响应信号采集
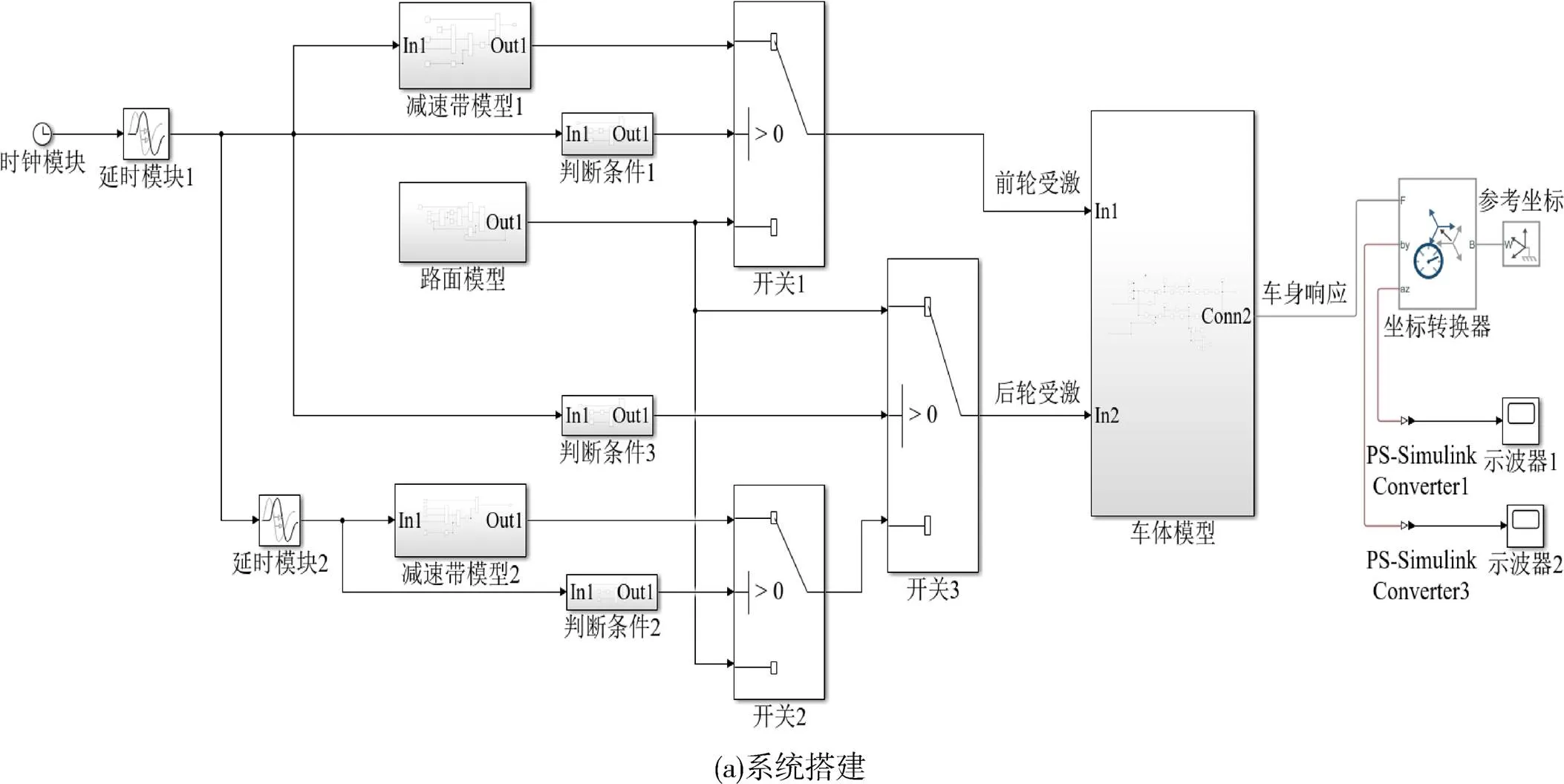
图6(a)所示为车辆通过减速带时的仿真分析模型。图6(a)中,减速带、路面、车体以及3个判断条件分别被封装在不同的子系统中。开关1和2用于判断减速带对车轮的激励是否完成(判断条件见图6(b)),设置分析为汽车单轮通过减速带的总时间/与时间之间的差值是否大于0。如果(/–)>0,执行减速带激励;如果 (/–)≤0,执行路面激励。开关3用于判断后轮到达减速带的时间(判断条件见图6(c))。如果((+)/-)>0,路面激励后轮;如果((+)/-)≤0,则根据开关2的判断条件执行减速带激励或路面激励。延时模块1用来定义减速带初始激励时刻,延时模块2用来定义后轮到达减速带的延迟时间,给定值为(+)/。车身响应通过坐标转换器输出(坐标转换器需连接参考坐标系)。坐标转换器的输出端口通过信号转换器Simulink-PS Converter模块连接到示波器上,以此实现对目标参数的测量和显示[8]。示波器1和2分别显示车身垂向加速度和俯仰角加速度响应。
2 汽车过减速带时的动力学性能分析
仿真参数取值为:1=2=50kg,3=690kg,=1222kgm2,k=20000N/m,k=17000N/m,1=2=1500 Ns/m,k=k=192000 N/m。=1.25m,=1.45m。减速带带宽=0.3m,减速带高度=0.05m。计算步长取为0.001s。图7所示为B级路面行驶的汽车以5m/s通过减速带时车身的垂直加速度(cc)和俯仰角加速度(ccr)的时间响应图。从图7(a)和7(b)中可以看出,前、后轮受激引起的两个车身垂向加速度的相位相同,而两个俯仰角加速度相位相反。汽车通过减速带时的车身加速度明显高于正常路面行驶时的情况,预示车辆通过减速带时的行驶平顺性明显下降。为了降低车辆乘坐的不适感,驾驶员通常会采取减速措施,由此起到行车限速的作用。
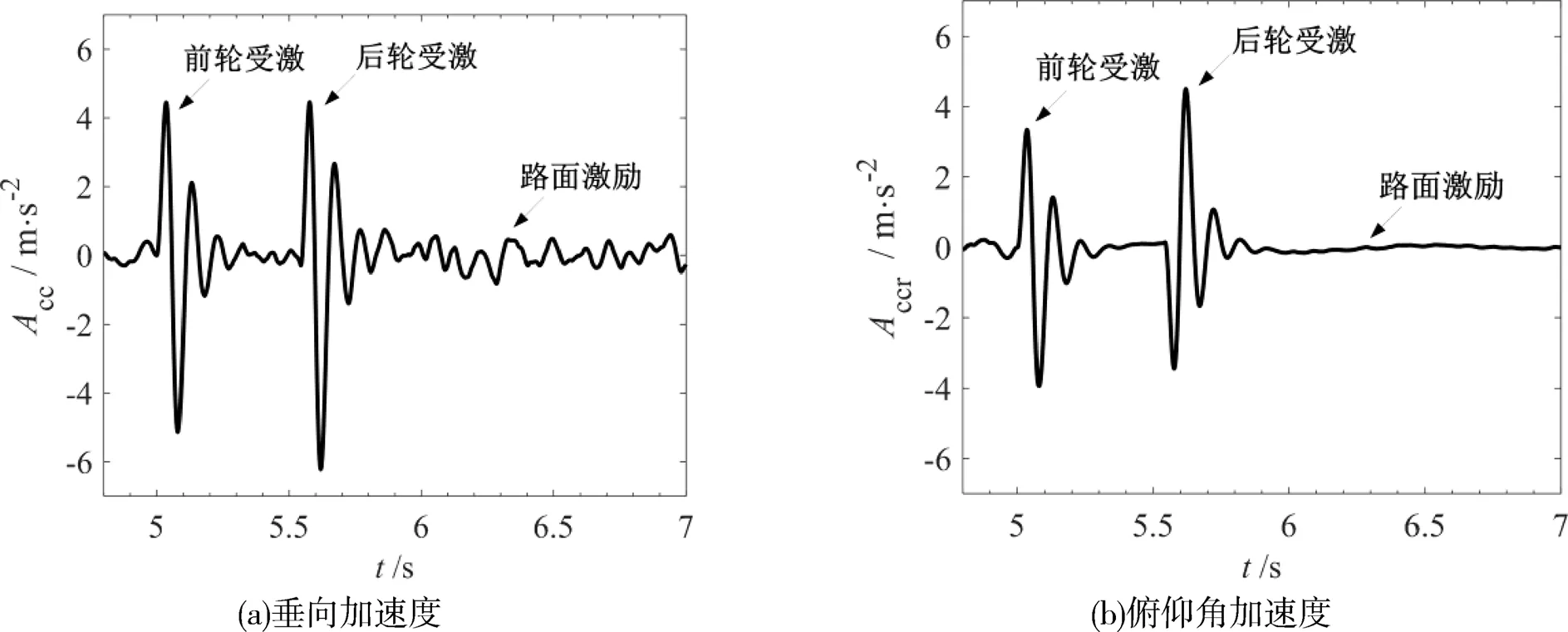
图7 汽车过减速带时的车身加速度响应(v=5ms-1)
在保证安全的前提下,为了使道路减速带有足够的控速效果,总希望车身加速度尽可能地大,以降低车辆的乘坐舒适性。考虑到市面上的橡胶减速带宽度和高度范围通常为0.3m≤≤0.4m和0.03m≤≤0.06m[9],本文根据此设定范围分析减速带尺寸对车身加速度的影响。根据车身加速度时间响应结果提取车身最大垂向加速度(|A|max)和最大俯仰角加速度(|A|max)。图8所示为车身最大垂向加速度和最大俯仰角加速度随减速带尺寸和车速的变化情况图。从图8(a)~8(d)中可以看出,对于任意给定尺寸的减速带,随着汽车行驶速度的增加,车身的最大垂向加速度和最大俯仰角加速度均先增加后逐渐减小。图8(a)和8(b)中,车速低于4.5 m/s时,尺寸越窄的减速带可以激励出越高的车身加速度;车速高于5.5m/s时,尺寸越宽的减速带可以激励出越高的车身加速度。图8(c)和8(d)中,减速带高度越高,车身加速度越大。
3 结论
本文利用Matlab软件中的SimMechanics模块建立了1/2车辆系统简化模型,并利用Simulink模块建立了椭圆形截面减速带模型和路面模型。通过减速带-路面-车辆联合仿真分析,分析了汽车以不同的车速经过道路减速带时的动力学性能。结果表明,汽车通过减速带时,车身垂向加速度和俯仰角加速度明显提高,汽车行驶平顺性下降。车速低于4.5m/s时,选取尺寸高而窄的减速带可以提高行车控速效果;车速高于5.5 m/s时,选取尺寸高而宽的减速带可以提高行车控速效果。
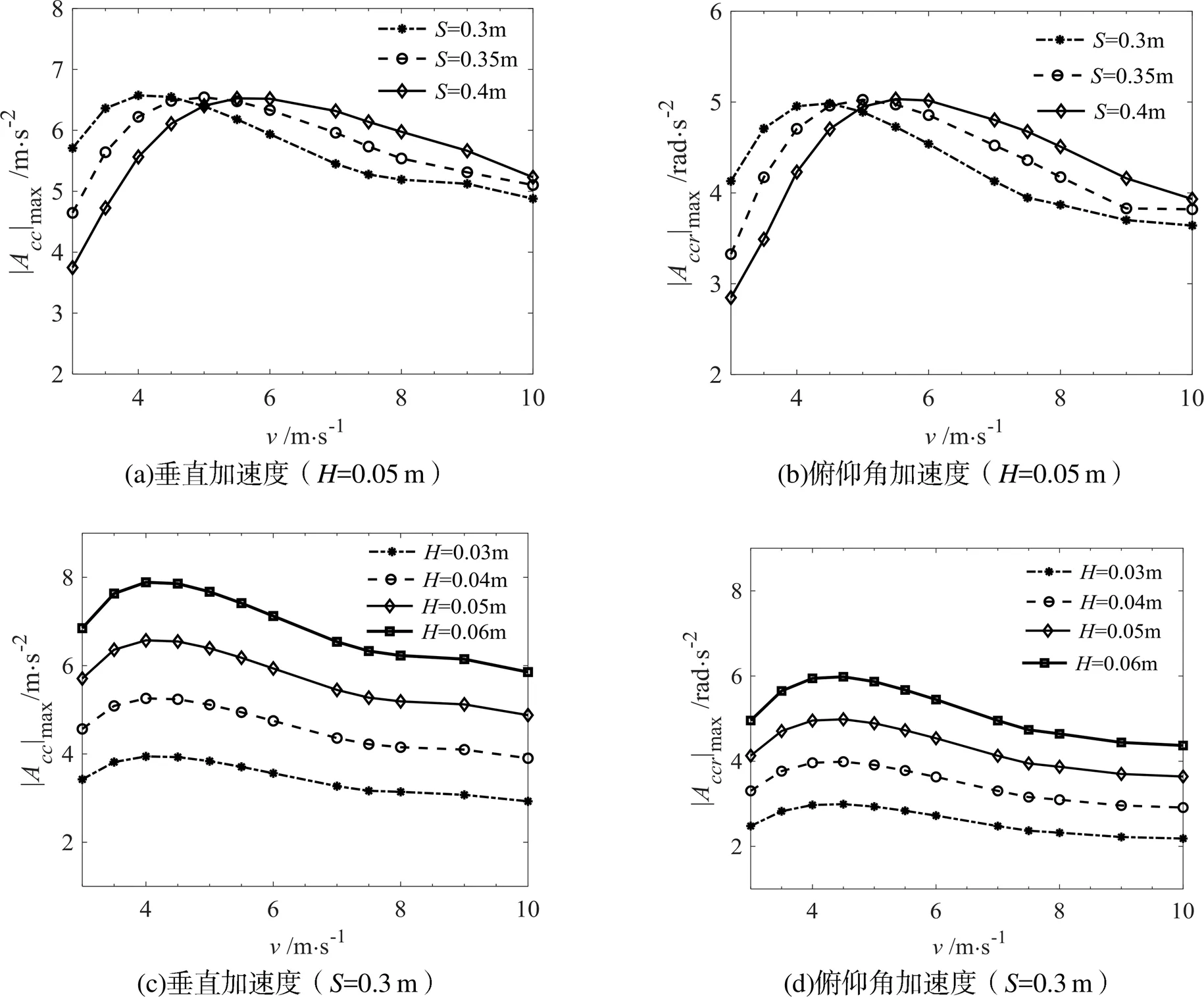
图8 减速带尺寸和车速对车身加速度的影响
[1] 刘猛, 张丽萍. 基于Matlab汽车悬架的参数仿真剖析[J]. 汽车实用技术,2018, 278(23): 200-202.
[2] 张丽萍,谢黎明. 悬架参数对汽车平顺性影响分析[J]. 汽车实用技术,2018, 276(21): 64-67.
[3] 蒋欣. 随机路面激励下的汽车振动模型分析[J]. 科技与创新,2021(17): 7-9.
[4] 冉滔,谷万裕,冉佳鑫,等. 运用Matlab对主动悬架系统仿真分析[J]. 内燃机与配件,2019(8): 37-38.
[5] 袁小慧,归文强. 两种减速带的减速效果研究[J]. 测试技术学报,2018, 32(04): 358-362.
[6] 侯臣元,彭为,靳晓雄,等. 汽车通过减速带动力学响应分析[J]. 机械设计与研究,2010, 26(02): 95-98.
[7] 李霞,董亚东,王婷婷,等. 基于车身振动的压电发电装置研究[J]. 机械设计与制造,2018(11): 260-264.
[8] 韩刚,刘瑞,吕鹤. 基于Solidworks与SimMechanics的刚体动力学联合仿真方法[J]. 齐齐哈尔大学学报(自然科学版),2021, 37(02): 35-40.
[9] 郑剑. 减速带激励下非线性汽车悬架系统动力学特性研究[D]. 重庆:重庆大学,2010.
Dynamics simulation analysis of vehicle passing over speed bump
WANG Hong-yan1,XIE Jin-cheng1,ZHANG Yu-wei1,MIAO Feng-juan2
(1.School of Mechanical and Electric Engineering, Qiqihar University, Heilongjiang Qiqihar 161006, China 2.College of Telecommunication and Electronic Engineering, Qiqihar University, Heilongjiang Qiqihar 161006, China)
This paper presents the study on the effect of the speed of the vehicle and the dimensions of the speed bump on the performance of the smoothness of the vehicle. A physical model of the 1/2 vehicle system is established in MATLAB/SimMechanics. The speed bump model and the road model are separately established in MATLAB/ Simulink. The dynamics simulation of the system is performed to obtain the vertical acceleration and the pitch angular acceleration of the car body for different car speeds. The results show that when compared with the road excitation, the speed bump can achieve higher vertical acceleration and higher pitch angular acceleration of the car body, which implies a lower smoothness of the car body. When the vehicle speed is lower than 4.5 m/s, the speed bump with a narrower width shows higher speed control effect. When the vehicle speed is higher than 5.5 m/s, the speed bump with a wider width shows higher speed control effect.
speed bump excitation;road surface excitation;vehicle;dynamics;SimMechanics;Simulink
2021-12-20
黑龙江省自然科学基金项目(ZD2019F004);齐齐哈尔大学教育科学研究项目(GJQTZX2021007);2021年齐齐哈尔大学大学生创新训练计划项目(202110232616)
王红艳(1974-),女,吉林扶余人,教授,博士,主要从事振动能量收集研究工作,wanghongyan1993@163.com。
TH113.1;U463.33
A
1007-984X(2022)05-0001-05
