MicrOBEM:小型海底电磁接收机
2022-06-16罗贤虎邓明邱宁孙珍王猛景建恩陈凯
罗贤虎,邓明,邱宁,孙珍,王猛,景建恩,陈凯
(1.广州海洋地质调查局 海洋技术方法研究所,广东 广州 510760; 2.中国地质大学(北京) 地球物理与信息技术学院,北京 100083; 3.南海海洋研究所 中国科学院边缘海与大洋重点实验室,广东 广州 511458;4.南海海洋研究所 南方海洋科学与工程广东省实验室(广州),广东 广州 511458)
0 引言
海底大地电磁测深(magnetotelluric,MT)即是把观测仪器布置在海底,测量天然场源的电磁场,其以平面波向海洋及海底穿透并在海底以下介质中感生出与地下电性结构相关的大地电磁场,经过后期数据预处理得出测深曲线(视电阻率和阻抗相位的频率响应),进而研究海底以下不同深度上介质的导电性差异,根据不同地质体或地质构造的电性差异推断地质结构,达到解决地质问题的目的。MT是一种天然场源方法,具有设备相对简便、施工简单、不受高阻层屏蔽的影响、对深部流体等低阻层反映灵敏、探测深度大(可以达到下地壳和上地幔)的优势[1]。MT测深根据工作水深与探测深度不同,主要运用的信号频率范围为10-5~100 Hz,现有的案例工作水深近6 000 m,探测深度近150 km以深[2]。因此在电磁法众多的方法分支中,MT已成为海底深部结构探测的首选方法,也是少数具备岩石圈深度探测能力的地球物理方法[3]。
鉴于海底MT方法的大探测深度,对高导电异常敏感,低海上作业成本等优势,在洋底扩张脊[4]、俯冲带[2,5]、海底地幔上升流[6]、油气资源调查[7-8]等海洋底构造地质研究领域取得了显著成效,已成为海洋地质—地球物理领域研究的热点。海底电磁接收机(ocean bottom electromagnetic receiver,OBEM)用于海底MT信号观测,原始数据质量直接关系到方法技术的探测效果[9]。当前国外同行在设备小型化方面取得了重要进展,美国Quasar公司生产的小型海底电磁接收机Qmax EM3[10]是当前小型海底电磁接收机中的优秀代表,采用电容电极技术,无需电场测量臂,整机体积仅约为0.5 m×0.5 m×0.5 m。日本神户大学[11]开发的低功耗磁测系统,适用于海底长期观测,整机功耗仅为26 mW,但缺点是不具备电场测量能力。中国地质大学(北京)最早于2017年[12]开展了小型电场接收机的研制,受限于功耗水平,并且浮力受限,不支持安装感应式磁传感器,还不具备磁场测量能力,无法独立完成MT测量工作。
在当前海底MT探测需求的驱动下,针对现有海底电磁接收机[13]存在的外围尺寸大、电源功耗大、制造成本高等问题,广州海洋地质调查局联合中国地质大学(北京)启动了小型海底电磁接收机(micro ocean bottom electromagnetic receiver,MicrOBEM)的研发工作,重点针对小体积、低功耗、低成本开展研究工作。采取了如下方案:① 小体积层面,传统的声学释放器笨重且昂贵,采用集成水声通讯OEM板结合外置的电腐蚀脱钩器方案,所需浮力大幅降低,玻璃球数量由原有的4个减至单个;② 低功耗层面,新研制低功耗采集电路、前放电路,整机功耗约至500 mW(感应式线圈配置),为原来的1/3,功耗的降低节省了电池数量进而减少浮力需求;③ 低成本方面,无需传统声学释放器、减少玻璃球数量,整机硬件成本降至一半;④ 具备磁通门传感器扩展功能,为长周期大地电磁测量奠定了基础,配置磁通门传感器时整机功耗仅为200 mW;⑤ 开发了回收信标,集成LED模块,方便夜间回收打捞,进一步提升海上作业效率。
1 硬件原理
MicrOBEM结构见图1,主要包括玻璃浮球、数据采集舱、感应式磁传感器舱、磁通门传感器舱(选装)、电极测量臂、电场传感器(电极)、水声换能器、框架、水泥块、水密电缆、电腐蚀脱钩器、信标浮球等。其中玻璃浮球用于提供浮力,数据采集舱内置采集电路、水声通讯板;感应式磁传感器舱内置感应线圈,实现水平磁场分量测量;磁通门传感器舱内置磁通门传感器,实现三轴正交磁场信号测量;4支测量臂和电场传感器实现电场分量测量;水声通讯板、换能器和电腐蚀脱钩器组成设备的声学释放单元;各个电气单元之间通过耐压水密电缆相连;信标浮球用于打捞时的位置指示,提升打捞效率。

图1 MicrOBEM实物照片Fig.1 Photo of MicrOBEM
1.1 数据采集舱
数据采集舱内置采集电路和锂电池组。为降低结构复杂度,整个采集舱单边开孔,仅引出了必要的仪器接口,包括电场传感器接入口、磁场传感器接入口、通信与充电接口、水声通讯换能器接口等。采集舱内结构如图2所示,左侧为电池组(BAT),右边为采集舱与外部的单边接口。采集舱内部从左往右所示电路模块依次为:水声通讯电路(ATM)、电场前置放大电路(AMP)与采集电路(ACQ)。
数据采集舱内电路(图3)主要包括电场前置放大器、采集模块、水声通讯模块。电场前置放大器完成3通道电场信号低噪声放大。采集模块支持10通道测量,电场、感应式线圈、磁通门各占用3通道,另有1通道备用。水声通讯板与外置的换能器配合,实现水声测距、电腐蚀开关,采集模块在水声模块的控制下输出恒流源,驱动电腐蚀脱钩器。甲板单元为舱内电路提供GPS授时、DC充电电源、USB通讯。电池组位于采集舱的后端不开孔一侧,共有两组。为保证仪器因电量不足停止采集后释放功能不受影响,电池组采用分别供电的模式,其中一组电池为采集电路供电,另一组电池连接水声通讯电路。水声通讯电路静态功耗约165 μA,配置了10 Ah电池组,最大限度地保证了水声通讯的安全可靠性。

图2 数据采集舱结构Fig.2 Structure diagram of data acquisition module
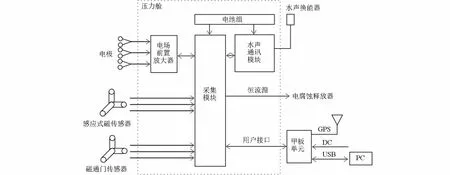
图3 数据采集舱电路原理框Fig.3 Diagram of data acquisition module
1.2 采集电路
采集电路实现信号采集、存储、传输及时间记录等功能,包括微控制器MCU模块、模数转换模块、时钟模块、电源模块、数据存取模块。PC端通过USB接口与采集电路交互。数据采集电路原理框图如图4,MCU直接管理多个ADC,并将数据写入TF卡。时间信息来自甲板盒中外置的GPS模块,通过MCU预留给模块的串口进行时间数据的读取。为使采集电路与上位机直接实现通讯,设计了一个USB Hub模块,实现USB与串口的转换。同时PC端也可通过USB Hub访问TF卡,实现数据的下载与上传,实测数据平均下载速度达18 MBps以上。电池组为6串18650型电池设计,满电25.2 V,经DC/DC至各模块供电。
1.3 前置放大器
斩波放大器原理与OBEM-III[13]中用到的放大器基本一致,所不同的是:① 修订了供电电压,±7 V 供电改为±2.8 V供电,消耗电流由10 mA降为5 mA;② 更新了时钟发生电路,进一步降低功耗;③ 更新了信号耦合变压器,提升了输入阻抗,噪声水平基本不变,压缩了体积,PCB尺寸为直径68 mm,高度约15 mm。小型化、低功耗改造后,但也牺牲了一定的量程,量程由8.5 mVpp[6]减小至 5 mVpp,导致动态范围有所减小。
1.4 水声释放
传统的声学释放器笨重且成本高,小型化首要目标就是解决声学释放器的笨重问题,采用定制的水声通讯板+换能器+电腐蚀脱钩器方案。水声通讯板直径68 mm,高约50 mm,与水声甲板单元配合实现测距、电腐蚀开关功能。水声通讯板收到电腐蚀开命令后,使能恒流源,电流约为0.5 A,腐蚀片约30 s后熔断。

图4 数据采集电路原理框(预留的单通道未给出)Fig.4 Diagram of data acquisition circuit (the reserved channel is not given)
水声甲板单元也进行了小型化改造,见图5,借助WIFI与手机端进行通讯,Android手机端运行APP程序,实现状态查询、测距、电腐蚀开关命令,无需外围的键盘、LCD等部件,进一步简化海上作业。手机端APP界面见图6,完成测距、电腐蚀开关的指令传达与状态显示。

图5 水声释放甲板单元原理框Fig.5 Diagram of acoustic release deck unit

图6 水声释放甲板单元APP界面截图Fig.6 Screenshot of the APP menu of acoustic release deck unit
1.5 主要技术指标
通道[9]:10(电场、感应式磁传感器、磁通门各3通道,备用1通道);
测量带宽:10 000 s~100 Hz;
本底噪声[11]:电场:优于0.1 nV/m/rt(Hz)@1Hz;磁通门:优于10 pT/rt(Hz)@1Hz;感应线圈:优于0.1 pT/rt(Hz)@1Hz;
功耗:小于500 mW(3E+水平感应线圈配置),小于200 mW(3E+磁通门传感器配置);
水下工作时间[13]:30 d连续采集(3E+水平感应线圈配置)+90 d待机;
最大工作水深:6 000 m;
存储空间:64 GB;
时漂:优于5 ms/d;
通道动态范围:E:>110 dB,H:>120 dB, B:>120 dB(@fs=300 Hz);
平均数据下载速度:>18 MB/s;
软件功能:支持用户操控仪器、数据下载、状态查询、数据浏览、数据分析及格式转换输出。
2 海上试验
为评估新研制的MicrOBEM在深水条件下的性能,团队携带两台小型海底电磁接收机(编号HA、HC)于2021年3月15日~4月15日搭载中国科学院南海海洋研究所实验二号科考船在南海南部开展了第一次深水MT测量实验。本航次的任务之一为大地电磁测深,作业工区见图7,水深约为1 400~2 000 m,测线长度约180 km,MicrOBEM共布设了5个站位。全部站位采样率均设置为150 Hz、增益设置为低增益档各站位明细见表1,其中S5站位受电。缆故障影响,经数据评估无效,进行了重新布放。图8展示了S3站位的部分MT时间序列,持续时间约4 500 s。Ey&Bx分量幅值相比Ex&By分量较强,电场峰峰值达400 nV/m,磁场峰峰值达10 pT。4通道水平分量之间相关性较高。
借助OBEM_PRO软件将各站位挑选的时间序列数据转为SSMT2000软件所兼容格式,输出TS4和TBL文件;借助SSMT2000软件进行阻抗估算,输出MT文件;借助MTEditor软件查看MT文件,对于结果不合格的数据重新挑选数据再次进行处理;对于数据质量较好的文件进行功率谱编辑并输出EDI文件。图9给出了5个站位数据预处理结果,S4站位的yx和S5站位的xy模式数据较差外,其余测深曲线数据质量较好,大部分站位低频至1 000 s以低。

图7 工区站位布置Fig.7 Work area layout
表1 海底MT站位投放点坐标
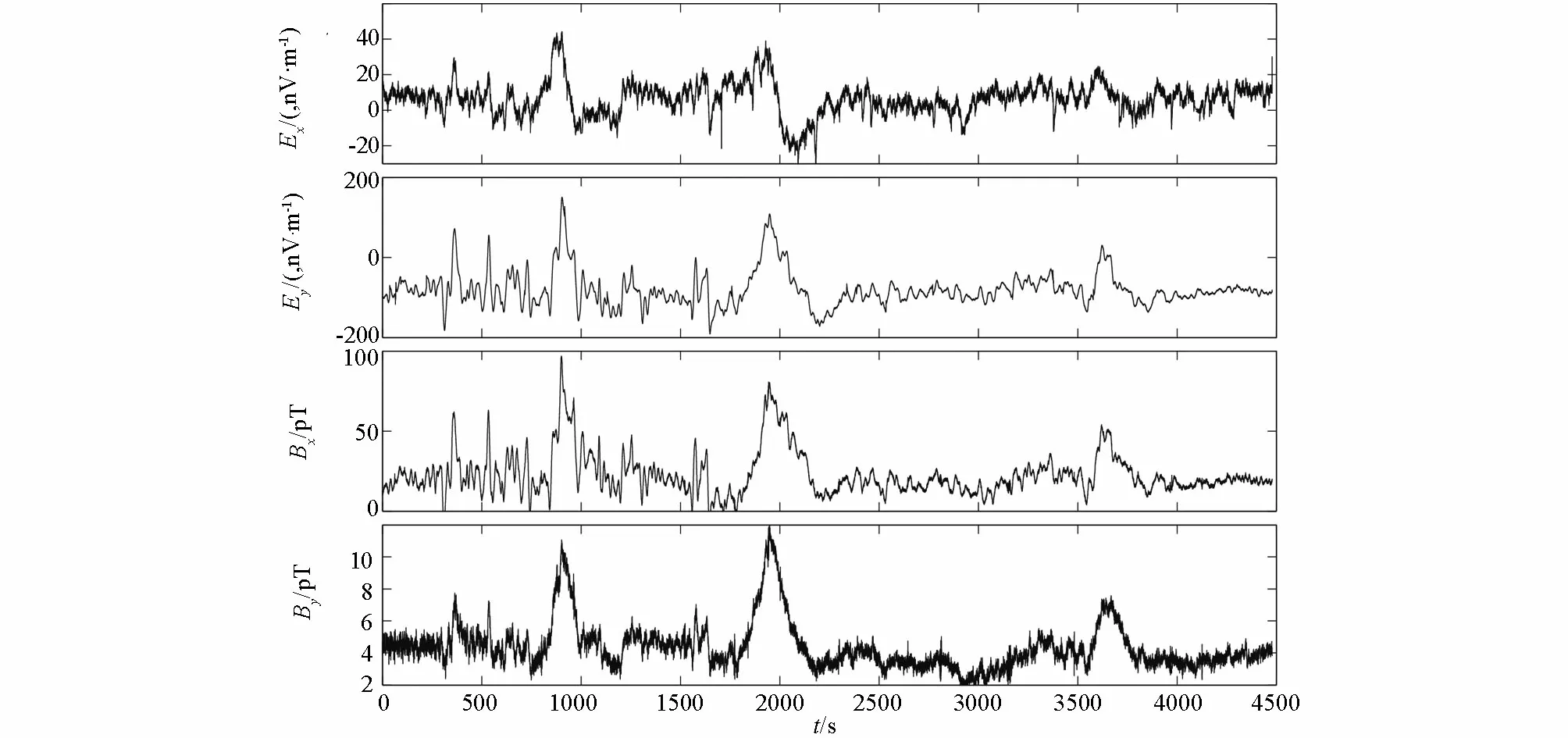
图8 实测时间序列片段(站位S3,水深1 826 m)Fig.8 Fragment of the measured time series (station S3, water depth 1 826 m)
本次海上试验经历6次深水(1 400~1 975 m)测试,回收率100%,小体积、低成本的电腐蚀熔断方案的可靠性得到验证。6次深水测试除S5站位(通道故障)数据无效外,经补做,5站位都获得有效数据,其中3站位测深曲线质量较好,整机的测量方案得到验证,但测量通道的可靠性需要进一步加强。经测试,2 000 m水深条件下,下沉耗时60 min,速度为33 m/min;上浮耗时80 min,上浮速度约为25 m/min,为提升仪器上浮速度,浮力配比需要进一步改善。本航次最长水下作业时间8 d,更长时间测试有待后续完成,最大水深为1 975 m,更深水深条件测试有待后续完成。
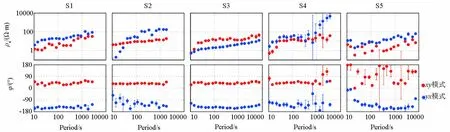
图9 五个站位MT测深原始数据曲线Fig.9 MT sounding raw data curves of five stations
3 结论
1)围绕小型化海底电磁接收机研制需求,开展了低功耗采集电路研制工作,整机功耗由原来的1 600 mW降至500 mW。集成水声通讯方案,抛弃了传统的声学释放器,使得整机在体积、成本方面大幅降低。
2)2 000 m级深水MT测试验证了仪器的可靠性与稳定性,获取较好的MT数据。更深水域、更长时间测试有待进一步验证。
3)MicrOBEM支持磁通门传感器,磁通门完成更低频段磁场测量,为未来长周期MT测量奠定了硬件基础。目前MicrOBEM已小批量生产20台,服务于海洋底深部构造研究和水下目标检测任务。
致谢:感谢中国科学院南海海洋研究所、南方海洋科学与工程广东省实验室(广州)南海U形海疆线综合研究团队项目(2019BT02H594)和人才团队引进重大专项(GML2019ZD0104)提供的航次船时,感谢广东省重点领域研发计划项目(2020B1111520001)提供的相关船载探测技术的支持;感谢实验2号轮全体船员支持。
